Você também pode gostar
- How To Implement The FFT Algorithm - CodeProjectDocumento5 páginasHow To Implement The FFT Algorithm - CodeProjectVegembogaAinda não há avaliações
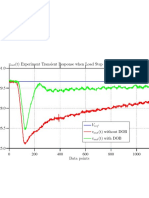
- V (T) Experiment Transient Response When Load Step Up With Different ControlDocumento1 páginaV (T) Experiment Transient Response When Load Step Up With Different ControlVegembogaAinda não há avaliações
- Aircraft Parameters by Ying HuoDocumento10 páginasAircraft Parameters by Ying HuoMohtashimAliKazmiAinda não há avaliações
- Fig DB Derivation 16122015Documento1 páginaFig DB Derivation 16122015VegembogaAinda não há avaliações
- Fig IFEEC2015 28082015Documento1 páginaFig IFEEC2015 28082015VegembogaAinda não há avaliações
- PMSM 3Documento4 páginasPMSM 3VegembogaAinda não há avaliações
- TeX Document 1Documento2 páginasTeX Document 1VegembogaAinda não há avaliações
- Japanese Spring 2011Documento24 páginasJapanese Spring 2011VegembogaAinda não há avaliações
- Aviti MS-ThesisAbstractDocumento3 páginasAviti MS-ThesisAbstractVegembogaAinda não há avaliações
- Cut Set MatrixDocumento12 páginasCut Set MatrixVegembogaAinda não há avaliações
- Wireless Power Transmission - SoubelDocumento46 páginasWireless Power Transmission - SoubelJaibin JoseAinda não há avaliações
- Master Thesis PresentationDocumento24 páginasMaster Thesis PresentationVegembogaAinda não há avaliações
- Master Thesis Presentation EDITEDDocumento43 páginasMaster Thesis Presentation EDITEDVegembogaAinda não há avaliações
- A CCR A Conf 2008Documento11 páginasA CCR A Conf 2008VegembogaAinda não há avaliações
- Master Thesis PresentationDocumento24 páginasMaster Thesis PresentationVegembogaAinda não há avaliações
- Prof Mahmood Mamdani SpeechDocumento6 páginasProf Mahmood Mamdani SpeechVegembogaAinda não há avaliações
- TCTP ReportDocumento16 páginasTCTP ReportVegembogaAinda não há avaliações
- This Paper Was Presented in The International Conference On ResearchDocumento9 páginasThis Paper Was Presented in The International Conference On ResearchVegembogaAinda não há avaliações
- Country ReportDocumento9 páginasCountry ReportVegembogaAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Dady - Piernas LargasDocumento12 páginasDady - Piernas LargasSarha NietoAinda não há avaliações
- Burn Tests On FibresDocumento2 páginasBurn Tests On Fibresapi-32133818100% (1)
- USB-to - Serial RS-232 Hub USB-to - Serial RS-422/485 Hub: UC2322/UC2324/UC4852/UC4854Documento1 páginaUSB-to - Serial RS-232 Hub USB-to - Serial RS-422/485 Hub: UC2322/UC2324/UC4852/UC4854sitrakiniavoAinda não há avaliações
- Classroom Debate Rubric Criteria 5 Points 4 Points 3 Points 2 Points 1 Point Total PointsDocumento1 páginaClassroom Debate Rubric Criteria 5 Points 4 Points 3 Points 2 Points 1 Point Total PointsKael PenalesAinda não há avaliações
- Advanced Work Packaging: A Fit For Purpose ApproachDocumento17 páginasAdvanced Work Packaging: A Fit For Purpose Approachhafidz bandungAinda não há avaliações
- R67068.0002 2 HB Profibus-Schnittstelle en KueblerDocumento42 páginasR67068.0002 2 HB Profibus-Schnittstelle en KueblerSabari StunnerAinda não há avaliações
- LITERARY THEORY BY TERRY EAGLETON NotesDocumento6 páginasLITERARY THEORY BY TERRY EAGLETON NotesPrachi SharmaAinda não há avaliações
- 37270a QUERCUS GBDocumento6 páginas37270a QUERCUS GBMocanu Romeo-CristianAinda não há avaliações
- 01 IntroductionDocumento15 páginas01 IntroductionAli FarhatAinda não há avaliações
- Mi Account ေက်ာ္နည္းDocumento16 páginasMi Account ေက်ာ္နည္းamk91950% (2)
- FhryhfhfhDocumento3 páginasFhryhfhfhAffan AhmadAinda não há avaliações
- Course Outline Principles of MarketingDocumento3 páginasCourse Outline Principles of MarketingKhate Tria De LeonAinda não há avaliações
- Florida Motor Fuel Tax Relief Act of 2022Documento9 páginasFlorida Motor Fuel Tax Relief Act of 2022ABC Action NewsAinda não há avaliações
- Teaching Mathematics Content Through Explicit TeachingDocumento39 páginasTeaching Mathematics Content Through Explicit Teachingronna drio100% (1)
- Pre Intermediate Talking ShopDocumento4 páginasPre Intermediate Talking ShopSindy LiAinda não há avaliações
- FmatterDocumento12 páginasFmatterNabilAlshawish0% (2)
- Integration Plan Grade 9 Mapeh SeptemberDocumento3 páginasIntegration Plan Grade 9 Mapeh Septemberbernie evaristo bacsaAinda não há avaliações
- Planetary Yogas in Astrology: O.P.Verma, IndiaDocumento7 páginasPlanetary Yogas in Astrology: O.P.Verma, IndiaSaptarishisAstrology50% (2)
- Harmony Guide DatabaseDocumento7 páginasHarmony Guide DatabaseAya SakamotoAinda não há avaliações
- Bug Life Cycle in Software TestingDocumento2 páginasBug Life Cycle in Software TestingDhirajAinda não há avaliações
- ANSI AAMI ST63 2002 - Sterilization of Healthcare Products - Dry HeatDocumento54 páginasANSI AAMI ST63 2002 - Sterilization of Healthcare Products - Dry HeatGraciane TagliettiAinda não há avaliações
- Aspen Plus User ModelsDocumento339 páginasAspen Plus User Modelskiny81100% (1)
- EVSDocumento3 páginasEVSSuyash AgrawalAinda não há avaliações
- Email ID: Contact No: +971562398104, +917358302902: Name: R.VishnushankarDocumento6 páginasEmail ID: Contact No: +971562398104, +917358302902: Name: R.VishnushankarJêmš NavikAinda não há avaliações
- Manual - Rapid Literacy AssessmentDocumento16 páginasManual - Rapid Literacy AssessmentBaldeo PreciousAinda não há avaliações
- Kazi Shafikull IslamDocumento3 páginasKazi Shafikull IslamKazi Shafikull IslamAinda não há avaliações
- Risk Assessment For Harmonic Measurement Study ProcedureDocumento13 páginasRisk Assessment For Harmonic Measurement Study ProcedureAnandu AshokanAinda não há avaliações
- U2 LO An Invitation To A Job Interview Reading - Pre-Intermediate A2 British CounciDocumento6 páginasU2 LO An Invitation To A Job Interview Reading - Pre-Intermediate A2 British CounciELVIN MANUEL CONDOR CERVANTESAinda não há avaliações
- RHB Islamic Bank BerhadDocumento2 páginasRHB Islamic Bank BerhadVape Hut KlangAinda não há avaliações
- Science, Technology and Society Module #1Documento13 páginasScience, Technology and Society Module #1Brent Alfred Yongco67% (6)