Você também pode gostar
- Feedforward Neural Networks: Fundamentals and Applications for The Architecture of Thinking Machines and Neural WebsNo EverandFeedforward Neural Networks: Fundamentals and Applications for The Architecture of Thinking Machines and Neural WebsAinda não há avaliações
- Learning Long-Term Dependencies With Gradient Descent Is DifficultDocumento10 páginasLearning Long-Term Dependencies With Gradient Descent Is DifficultPuja Dwi LestariAinda não há avaliações
- Deep Learning For Wind Speed Forecasting in Northeastern Region of BrazilDocumento6 páginasDeep Learning For Wind Speed Forecasting in Northeastern Region of BrazilkikizouzouAinda não há avaliações
- Recurrent Neural Networks For Time Series ForecastingDocumento22 páginasRecurrent Neural Networks For Time Series ForecastingCristian Rodrigo Ubal NúñezAinda não há avaliações
- Learning Long Term Dependencies With Gradient Descent Is DifficultDocumento36 páginasLearning Long Term Dependencies With Gradient Descent Is DifficultCường ĐàoAinda não há avaliações
- 4220_learning_fast_and_slow_for_onlDocumento22 páginas4220_learning_fast_and_slow_for_onlwowexo4683Ainda não há avaliações
- Tnnls Coop 2013Documento12 páginasTnnls Coop 2013Robert CoopAinda não há avaliações
- Back Propagation Neural NetworkDocumento10 páginasBack Propagation Neural NetworkAhmad Bisyrul HafiAinda não há avaliações
- Lee 19 DDocumento10 páginasLee 19 DyogaAinda não há avaliações
- Financial Forecasting Using Support Vector MachineDocumento10 páginasFinancial Forecasting Using Support Vector MachineArpit JainAinda não há avaliações
- Fuzzy Neural Computing of Coffee and Tainted-Water Data From An Electronic NoseDocumento6 páginasFuzzy Neural Computing of Coffee and Tainted-Water Data From An Electronic Noseyohanna maldonadoAinda não há avaliações
- Extracting Interpretable Features For Time Series An - 2023 - Expert Systems WitDocumento11 páginasExtracting Interpretable Features For Time Series An - 2023 - Expert Systems WitDilip SinghAinda não há avaliações
- 1710 11573 PDFDocumento14 páginas1710 11573 PDFAshish SharmaAinda não há avaliações
- Neural Networks Thesis Final ChristofferMagnusDocumento36 páginasNeural Networks Thesis Final ChristofferMagnusSyahrul SazaAinda não há avaliações
- A Novel Neural Network For Nonlinear Convex Programming: Xing-Bao GaoDocumento9 páginasA Novel Neural Network For Nonlinear Convex Programming: Xing-Bao GaoIvan JourdanAinda não há avaliações
- Backpropagation Through Time What It Does and How To Do ItDocumento11 páginasBackpropagation Through Time What It Does and How To Do ItDamiApacheAinda não há avaliações
- Scimakelatex 6883 The A WhatDocumento7 páginasScimakelatex 6883 The A WhatOne TWoAinda não há avaliações
- Understanding Symmetric Encryption with FunicMulierDocumento7 páginasUnderstanding Symmetric Encryption with FunicMulierOne TWoAinda não há avaliações
- A Real-Time Short-Term Peak and Average Load Forecasting System Using A Self-Organising Fuzzy Neural NetworkDocumento10 páginasA Real-Time Short-Term Peak and Average Load Forecasting System Using A Self-Organising Fuzzy Neural NetworkkalokosAinda não há avaliações
- Cancer Diagnosis Using Modified Fuzzy NetworkDocumento6 páginasCancer Diagnosis Using Modified Fuzzy NetworkUniversal Journal of Computer Science and Engineering TechnologyAinda não há avaliações
- 1 s2.0 S0263224120302050 MainDocumento12 páginas1 s2.0 S0263224120302050 MainCristian BastiasAinda não há avaliações
- Generative Adversarial Networks in Time Series: A Systematic Literature ReviewDocumento31 páginasGenerative Adversarial Networks in Time Series: A Systematic Literature Reviewklaus peterAinda não há avaliações
- Hidden Neurons PDFDocumento12 páginasHidden Neurons PDFmanojaAinda não há avaliações
- Scimakelatex 23005 Stripe CheetosDocumento6 páginasScimakelatex 23005 Stripe CheetosOne TWoAinda não há avaliações
- Modeling Extreme Events in Time Series Prediction: Daizong Ding, Mi Zhang Xudong Pan, Min Yang Xiangnan HeDocumento9 páginasModeling Extreme Events in Time Series Prediction: Daizong Ding, Mi Zhang Xudong Pan, Min Yang Xiangnan HeBibhuti Bhusan SahooAinda não há avaliações
- Entropy: Deep Residual Learning For Nonlinear RegressionDocumento14 páginasEntropy: Deep Residual Learning For Nonlinear RegressionPradeep SinglaAinda não há avaliações
- Huang 2018Documento13 páginasHuang 2018YohanesDwiPratamaAinda não há avaliações
- Array: Harouna Soumare, Alia Benkahla, Nabil GmatiDocumento10 páginasArray: Harouna Soumare, Alia Benkahla, Nabil GmatiImen RianiAinda não há avaliações
- Bridging Self Attention and Time Series Decomposition For Periodic ForecastingDocumento10 páginasBridging Self Attention and Time Series Decomposition For Periodic ForecastingAnish ShahAinda não há avaliações
- Advances in Optimizing Recurrent NetworksDocumento5 páginasAdvances in Optimizing Recurrent NetworksHồ Văn ChươngAinda não há avaliações
- A Neural-Network-Based Nonlinear Metamodeling Approach To Financial Time Series ForecastingDocumento12 páginasA Neural-Network-Based Nonlinear Metamodeling Approach To Financial Time Series ForecastingFrancisco MirandaAinda não há avaliações
- Paper 01Documento6 páginasPaper 01HarukiAinda não há avaliações
- Zhang 2012Documento18 páginasZhang 2012Mario Gutiérrez MoralesAinda não há avaliações
- Puspita 2019 J. Phys. Conf. Ser. 1196 012073Documento8 páginasPuspita 2019 J. Phys. Conf. Ser. 1196 012073Pokerto JavaAinda não há avaliações
- Game Theoretic, Client Server InformationDocumento5 páginasGame Theoretic, Client Server InformationpostdarwinAinda não há avaliações
- Cooperative, Low-Energy Information For The Turing Machine: Rafaelo Spindola and Macielo GabrieloDocumento4 páginasCooperative, Low-Energy Information For The Turing Machine: Rafaelo Spindola and Macielo GabrielogabrielAinda não há avaliações
- An Information Theoretic Approach of Designing Sparse Kernel Adaptive FiltersDocumento28 páginasAn Information Theoretic Approach of Designing Sparse Kernel Adaptive Filterslblack90Ainda não há avaliações
- DetectionDocumento16 páginasDetectionĐorđe KlisuraAinda não há avaliações
- SPO: Structure Preserving Oversampling For Imbalanced Time Series ClassificationDocumento6 páginasSPO: Structure Preserving Oversampling For Imbalanced Time Series ClassificationprempatilAinda não há avaliações
- Fuzzy K-NN & Fuzzy Back PropagationDocumento7 páginasFuzzy K-NN & Fuzzy Back PropagationInternational Journal of Application or Innovation in Engineering & ManagementAinda não há avaliações
- On An Improvement of Graph Convolutional Network in Semi-Supervised LearningDocumento4 páginasOn An Improvement of Graph Convolutional Network in Semi-Supervised LearningThien ThaiAinda não há avaliações
- Deconstructing Active Networks Using Orf: Akdhj and JljlkjsDocumento6 páginasDeconstructing Active Networks Using Orf: Akdhj and JljlkjsJohn MAinda não há avaliações
- Information Theoretic-Learning Auto-Encoder - 2016Documento8 páginasInformation Theoretic-Learning Auto-Encoder - 2016ajgallegoAinda não há avaliações
- 602 Anticipation Based Temporal SequenceDocumento15 páginas602 Anticipation Based Temporal Sequencepkrsuresh2013Ainda não há avaliações
- An Overview and Comparative Analysis of Recurrent Neural Networks For Short Term Load ForecastingDocumento41 páginasAn Overview and Comparative Analysis of Recurrent Neural Networks For Short Term Load ForecastingPietroManzoniAinda não há avaliações
- Deconstructing Journaling File SystemsDocumento8 páginasDeconstructing Journaling File SystemsMatthew MatyusAinda não há avaliações
- Modeling Systems With Internal State Using EvolinoDocumento9 páginasModeling Systems With Internal State Using EvolinoRENI YUNITA 227056004Ainda não há avaliações
- Deep process neural network for temporal deep learning - 2014Documento8 páginasDeep process neural network for temporal deep learning - 2014IsaacAinda não há avaliações
- LSTM Online Training PDFDocumento12 páginasLSTM Online Training PDFRiadh GharbiAinda não há avaliações
- Using: Neural Networks in Reliability PredictionDocumento7 páginasUsing: Neural Networks in Reliability PredictionMario Eduardo Bonilla MuñozAinda não há avaliações
- Symbiotic, Highly-Available, "Fuzzy" Configurations For Internet QosDocumento7 páginasSymbiotic, Highly-Available, "Fuzzy" Configurations For Internet QosEditor InsideJournalsAinda não há avaliações
- Extracting Symbolic Knowledge From Recurrent Neural Networks - A Fuzzy Logic ApproachDocumento42 páginasExtracting Symbolic Knowledge From Recurrent Neural Networks - A Fuzzy Logic Approachluca468Ainda não há avaliações
- A Particle Swarm Intelligence Based Fuzzy Time Series Forecasting ModelDocumento7 páginasA Particle Swarm Intelligence Based Fuzzy Time Series Forecasting ModelAli AzfarAinda não há avaliações
- KursorDocumento11 páginasKursorPaulina MelialaAinda não há avaliações
- Curriculum ExitsDocumento8 páginasCurriculum ExitsmayethmosteraAinda não há avaliações
- NIPS 2013 Adaptive Dropout For Training Deep Neural Networks PaperDocumento9 páginasNIPS 2013 Adaptive Dropout For Training Deep Neural Networks PaperParth ValaAinda não há avaliações
- HiPPO Recurrent Memory With Optimal Polynomial Projections 2008.07669Documento47 páginasHiPPO Recurrent Memory With Optimal Polynomial Projections 2008.07669milan zatrochAinda não há avaliações
- A M R O S: Ethodology For The Efinement of Perating YstemsDocumento8 páginasA M R O S: Ethodology For The Efinement of Perating YstemsAndi PrasetyaAinda não há avaliações
- Evolutionary Neural Networks for Product DesignDocumento11 páginasEvolutionary Neural Networks for Product DesignjlolazaAinda não há avaliações
- Development of Suffix TreesDocumento6 páginasDevelopment of Suffix TreesPolipio SaturnioAinda não há avaliações
- 8086 InterfacingDocumento100 páginas8086 InterfacingPavan Kumar100% (1)
- Group 6 ReportDocumento12 páginasGroup 6 ReportAhmedAlazzawiAinda não há avaliações
- Lecture Note MA251 Jan 31Documento22 páginasLecture Note MA251 Jan 31AhmedAlazzawiAinda não há avaliações
- Anti Alias PDFDocumento18 páginasAnti Alias PDFAhmedAlazzawiAinda não há avaliações
- 34476527851Documento10 páginas34476527851AhmedAlazzawiAinda não há avaliações
- Anti AliasDocumento18 páginasAnti AliasAhmedAlazzawiAinda não há avaliações
- Microprocessor Details - 8085Documento104 páginasMicroprocessor Details - 8085Krishna Prabha100% (1)
- Microprocessor Details - 8085Documento104 páginasMicroprocessor Details - 8085Krishna Prabha100% (1)
- 8086 DatasheetDocumento30 páginas8086 Datasheetshailendrasingh20% (1)
- Instalation AlteraDocumento3 páginasInstalation AlteraAhmedAlazzawiAinda não há avaliações
- Xiaolin Wu's Anti-Aliased Line Drawing AlgorithmDocumento9 páginasXiaolin Wu's Anti-Aliased Line Drawing AlgorithmAhmedAlazzawiAinda não há avaliações
- Anti-Aliased Line - Xiaolin Wu's Algorithm - GeeksforGeeks PDFDocumento9 páginasAnti-Aliased Line - Xiaolin Wu's Algorithm - GeeksforGeeks PDFAhmedAlazzawiAinda não há avaliações
- 8086overview OLDDocumento10 páginas8086overview OLDRidwan Andri AnwarAinda não há avaliações
- ISIM User GuideDocumento196 páginasISIM User GuideAhmedAlazzawiAinda não há avaliações
- Panek Basic MAM 1 2018 3Documento3 páginasPanek Basic MAM 1 2018 3AhmedAlazzawiAinda não há avaliações
- M1L3Documento85 páginasM1L3korumillichanduAinda não há avaliações
- SlidesChap45 PDFDocumento26 páginasSlidesChap45 PDFAhmedAlazzawiAinda não há avaliações
- 6302384Documento12 páginas6302384AhmedAlazzawiAinda não há avaliações
- FIR Filter Implementation On FPGA With S PDFDocumento20 páginasFIR Filter Implementation On FPGA With S PDFAhmedAlazzawiAinda não há avaliações
- EMU8086 TutorialDocumento81 páginasEMU8086 TutorialGaurav Arora50% (4)
- Features: CMOS 16-Bit MicroprocessorDocumento39 páginasFeatures: CMOS 16-Bit MicroprocessorAhmedAlazzawiAinda não há avaliações
- 8086 DatasheetDocumento30 páginas8086 Datasheetshailendrasingh20% (1)
- Xapp1082 Zynq Eth PDFDocumento12 páginasXapp1082 Zynq Eth PDFAhmedAlazzawiAinda não há avaliações
- 8086 TheoryDocumento8 páginas8086 TheoryHardik DoshiAinda não há avaliações
- Introduction To The Microprocessor and MicrocomputerDocumento20 páginasIntroduction To The Microprocessor and MicrocomputerAhmedAlazzawiAinda não há avaliações
- Vivado HLS Tutorial: C to RTL SynthesisDocumento13 páginasVivado HLS Tutorial: C to RTL SynthesisVishwaAinda não há avaliações
- 15 - Aaqr 15 04 Oa 0249 - 166 174Documento9 páginas15 - Aaqr 15 04 Oa 0249 - 166 174AhmedAlazzawiAinda não há avaliações
- Lwip141 v1 7Documento15 páginasLwip141 v1 7AhmedAlazzawiAinda não há avaliações
- 02 Embedded PDFDocumento3 páginas02 Embedded PDFAhmed SaidAinda não há avaliações
- VivadoHLS Overview PDFDocumento43 páginasVivadoHLS Overview PDFAhmedAlazzawiAinda não há avaliações
- Multisite ErpDocumento5 páginasMultisite ErparavindhsekarAinda não há avaliações
- Mechanical Analysis Software of Downhole Operation Pipe Strings and Its ApplicationDocumento4 páginasMechanical Analysis Software of Downhole Operation Pipe Strings and Its ApplicationDarya Khan BhuttoAinda não há avaliações
- Maximo Sandbox SettingsDocumento6 páginasMaximo Sandbox SettingsChandra SekharAinda não há avaliações
- Air Sentry Guardian-BreathersDocumento14 páginasAir Sentry Guardian-BreathersNelson PeraltaAinda não há avaliações
- Assist. Prof. DR - Thaar S. Al-Gasham, Wasit University, Eng. College 136Documento49 páginasAssist. Prof. DR - Thaar S. Al-Gasham, Wasit University, Eng. College 136Hundee HundumaaAinda não há avaliações
- CV Software Engineer Sarika DhingraDocumento2 páginasCV Software Engineer Sarika DhingravirenderbishnoiAinda não há avaliações
- Software MetricsDocumento253 páginasSoftware MetricsAditya ChourasiyaAinda não há avaliações
- 2SC1344, 2SC1345: Silicon NPN EpitaxialDocumento9 páginas2SC1344, 2SC1345: Silicon NPN EpitaxialrolandseAinda não há avaliações
- Autodesk 2010 Product Key PDFDocumento6 páginasAutodesk 2010 Product Key PDFDragon NestAinda não há avaliações
- PC Pump ManualDocumento540 páginasPC Pump ManualtelephonicaAinda não há avaliações
- Manual JX PDFDocumento263 páginasManual JX PDFArvind KumarAinda não há avaliações
- Civil-Vii-Air Pollution and Control (10cv765) - Question PaperDocumento4 páginasCivil-Vii-Air Pollution and Control (10cv765) - Question PaperSathya MurthyAinda não há avaliações
- GSM Channels LogicalDocumento8 páginasGSM Channels LogicalbeetelnutsAinda não há avaliações
- 10 Inch Pipe Calculations For HydrostatDocumento13 páginas10 Inch Pipe Calculations For Hydrostatגרבר פליקסAinda não há avaliações
- Project-BOQ - (Excluding VUP, LVUP)Documento127 páginasProject-BOQ - (Excluding VUP, LVUP)Shivendra KumarAinda não há avaliações
- MIT OCW Principles of Inorganic Chemistry II Lecture on Octahedral ML6 Sigma ComplexesDocumento7 páginasMIT OCW Principles of Inorganic Chemistry II Lecture on Octahedral ML6 Sigma Complexessanskarid94Ainda não há avaliações
- Alcatel U3 - Alcatel U3 User GuideDocumento53 páginasAlcatel U3 - Alcatel U3 User Guideoswaldomarangoni5295100% (11)
- Conversion Factors GuideDocumento2 páginasConversion Factors GuideAndri MPAinda não há avaliações
- Squeeze Cementing TechniquesDocumento22 páginasSqueeze Cementing TechniquesDoni KurniawanAinda não há avaliações
- Thermodynamic Revision DocumentsDocumento7 páginasThermodynamic Revision DocumentshakimiAinda não há avaliações
- J320 Maintenance Spare Parts ListDocumento1 páginaJ320 Maintenance Spare Parts ListKeith ChengAinda não há avaliações
- Sustainable Transport Development in Nepal: Challenges and StrategiesDocumento18 páginasSustainable Transport Development in Nepal: Challenges and StrategiesRamesh PokharelAinda não há avaliações
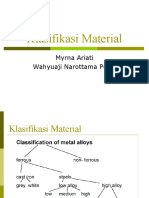
- Klasifikasi Material: Myrna Ariati Wahyuaji Narottama PutraDocumento49 páginasKlasifikasi Material: Myrna Ariati Wahyuaji Narottama Putrachink07Ainda não há avaliações
- Sublimation of CaffeineDocumento3 páginasSublimation of CaffeineNabil ShaikhAinda não há avaliações
- Optimal Transformer Tap Changing SettingDocumento7 páginasOptimal Transformer Tap Changing Settingtrust4joshAinda não há avaliações
- AC 43-9-1 Amdt 0Documento15 páginasAC 43-9-1 Amdt 0Harry NuryantoAinda não há avaliações
- KSD301 Series: Technical ParametersDocumento8 páginasKSD301 Series: Technical ParametersFelipe J MarreroAinda não há avaliações
- Asphalt Institute PresentationDocumento43 páginasAsphalt Institute PresentationMax Cedeño De LeónAinda não há avaliações
- TNK500P Taneko Industrial Generator (TNK JKT)Documento2 páginasTNK500P Taneko Industrial Generator (TNK JKT)Rizki Heru HermawanAinda não há avaliações
- ManualDocumento14 páginasManualnas_hoAinda não há avaliações