Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- C-Mac For Neonatology and Pediatrics: The Premium Class For Pediatric Airway ManagementDocumento24 páginasC-Mac For Neonatology and Pediatrics: The Premium Class For Pediatric Airway ManagementAna-Mihaela BalanutaAinda não há avaliações
- Ece1008 - Electronics Hardware TroubleshootingDocumento6 páginasEce1008 - Electronics Hardware TroubleshootingKartik VashistAinda não há avaliações
- Heidenhain DiadurDocumento12 páginasHeidenhain Diadurjacksonholland8335Ainda não há avaliações
- 88C Airbags and Pretensioners DusterDocumento90 páginas88C Airbags and Pretensioners DusterZatovonirina RazafindrainibeAinda não há avaliações
- G300 - Wiring DiagramDocumento3 páginasG300 - Wiring DiagramAsad NizamAinda não há avaliações
- Service Manual: Multi Channel Av ReceiverDocumento106 páginasService Manual: Multi Channel Av ReceiverSas Pro EletronicaAinda não há avaliações
- KirtiJainDocumento16 páginasKirtiJainKirti JainAinda não há avaliações
- Esd5111 enDocumento4 páginasEsd5111 enRicardo MonteroAinda não há avaliações
- AutoMeter Sport Comp InstallationDocumento2 páginasAutoMeter Sport Comp Installationxeron7126Ainda não há avaliações
- Complete Notes of MicroprocesserDocumento36 páginasComplete Notes of Microprocesser2008 AvadhutAinda não há avaliações
- 110401106139X MSR-500 (UT33D) English Manual MEASURE UP ETEKCITYDocumento9 páginas110401106139X MSR-500 (UT33D) English Manual MEASURE UP ETEKCITYKeith StewartAinda não há avaliações
- Discrete I/O ExpansionsDocumento1 páginaDiscrete I/O ExpansionsS DAinda não há avaliações
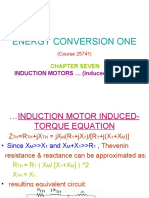
- Energy Conversion One: INDUCTION MOTORS (Induced Torque )Documento10 páginasEnergy Conversion One: INDUCTION MOTORS (Induced Torque )prasad243243Ainda não há avaliações
- Hopkinson's Test - Electrical4u PDFDocumento9 páginasHopkinson's Test - Electrical4u PDFM Kumar MarimuthuAinda não há avaliações
- Al-Si-Xlpe-Hdpe 1cx120 Mm2 - 15kv (Sac Cable)Documento3 páginasAl-Si-Xlpe-Hdpe 1cx120 Mm2 - 15kv (Sac Cable)A&Z cableAinda não há avaliações
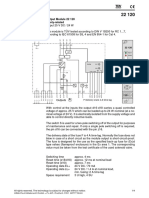
- Output Module 22 120 Safety-Related: F Delivery State 4 A Time-LagDocumento4 páginasOutput Module 22 120 Safety-Related: F Delivery State 4 A Time-LagGilberto Alejandro Tun BritoAinda não há avaliações
- PD Freshers - PD Interview Questions and Answers - Part 1 PDFDocumento12 páginasPD Freshers - PD Interview Questions and Answers - Part 1 PDFsrajece0% (1)
- Philips - 715g6197 p01 000 0020 - PsuDocumento4 páginasPhilips - 715g6197 p01 000 0020 - PsuFale MensAinda não há avaliações
- Arduino PDFDocumento9 páginasArduino PDFMuhammad HazimAinda não há avaliações
- Configurable Multi Input Multi Set PointDocumento20 páginasConfigurable Multi Input Multi Set PointManuel FuentesAinda não há avaliações
- XY Power 30kW Power Module For Fast EV Charging StationsDocumento2 páginasXY Power 30kW Power Module For Fast EV Charging StationsSam GuoAinda não há avaliações
- Adobe Scan 13 Feb 2023Documento10 páginasAdobe Scan 13 Feb 2023omar meroAinda não há avaliações
- Instrumentation and Control ReviewDocumento84 páginasInstrumentation and Control ReviewDanish Afroz100% (1)
- A1700 Programmable Polyphase Meter: Chapter 7 - InstallationDocumento25 páginasA1700 Programmable Polyphase Meter: Chapter 7 - InstallationSong Luy 1 Solar Power PlantAinda não há avaliações
- Lessons in Electric Circuits - 3 SemiconductorsDocumento403 páginasLessons in Electric Circuits - 3 SemiconductorsMichael WeberAinda não há avaliações
- PART 4-Elec Buk (Final)Documento18 páginasPART 4-Elec Buk (Final)Mizhar Layosa GerardoAinda não há avaliações
- Waco DT 2234cDocumento4 páginasWaco DT 2234cKarthii AjuAinda não há avaliações
- Resistance Thermometer Measuring Transducer - MINI MCR-SL-PT100-UI - 2864435Documento10 páginasResistance Thermometer Measuring Transducer - MINI MCR-SL-PT100-UI - 2864435nemoneoAinda não há avaliações
- Error Display Dorma-ES-200Documento7 páginasError Display Dorma-ES-200MichaelAinda não há avaliações