Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- c2Documento15 páginasc2VienNgocQuangAinda não há avaliações
- A Mems Implementasi of A Classic Parametric ResonatorDocumento8 páginasA Mems Implementasi of A Classic Parametric ResonatorAgusAprilyansahAinda não há avaliações
- Sciencedirect: An Ideal Mems Parametric Resonator Using A Tapered Comb-DriveDocumento4 páginasSciencedirect: An Ideal Mems Parametric Resonator Using A Tapered Comb-DriveAgusAprilyansahAinda não há avaliações
- A MEMS Implementation of The Classic Meissner Parametric Resonator Exploring High-Order Windows of Unbounded ResponseDocumento8 páginasA MEMS Implementation of The Classic Meissner Parametric Resonator Exploring High-Order Windows of Unbounded ResponseAgusAprilyansahAinda não há avaliações
- Chap 7Documento3 páginasChap 7AgusAprilyansahAinda não há avaliações
- A MEMS Implementation of The Classic Meissner Parametric Resonator Exploring High-Order Windows of Unbounded ResponseDocumento8 páginasA MEMS Implementation of The Classic Meissner Parametric Resonator Exploring High-Order Windows of Unbounded ResponseAgusAprilyansahAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Mechanism and Robot Kinematics: Anirvan DasguptaDocumento122 páginasMechanism and Robot Kinematics: Anirvan Dasguptaसुमित शर्माAinda não há avaliações
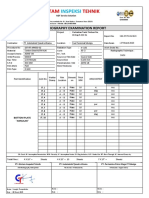
- Pt. Gintam Tehnik: InspeksiDocumento5 páginasPt. Gintam Tehnik: Inspeksirizky youlandaAinda não há avaliações
- 5 Steps To A 5 AP Physics C 2017 - McGraw-HillDocumento299 páginas5 Steps To A 5 AP Physics C 2017 - McGraw-HillRishit Kalra100% (1)
- Dex39 1540 - REV 01Documento1 páginaDex39 1540 - REV 01Navneet RankAinda não há avaliações
- Sanjana 04 Acoustics ReportDocumento5 páginasSanjana 04 Acoustics ReportSanjana BhandiwadAinda não há avaliações
- ANSYS-CFD Analysis of Condensation Process Occurring Inside High Efficiency BoilersDocumento20 páginasANSYS-CFD Analysis of Condensation Process Occurring Inside High Efficiency Boilerskulov1592Ainda não há avaliações
- Rectangular DuctDocumento67 páginasRectangular DuctAUCE9802100% (3)
- Flange Design Tablated FormDocumento4 páginasFlange Design Tablated Formmukesh100% (1)
- Rail Transportation Safety Investigation Report R21C0070Documento7 páginasRail Transportation Safety Investigation Report R21C0070CTV CalgaryAinda não há avaliações
- 1104D-E44T and 1104D-E44TA Industrial Engine Electrical SystemDocumento2 páginas1104D-E44T and 1104D-E44TA Industrial Engine Electrical SystemGerman E.100% (1)
- CCMC Canadian Code Compliance Evaluation - National Research Council CanadaDocumento14 páginasCCMC Canadian Code Compliance Evaluation - National Research Council CanadaMark AdamsAinda não há avaliações
- Heat Flow Calculations Made Using The V C: Ventilation Test InstrumentsDocumento6 páginasHeat Flow Calculations Made Using The V C: Ventilation Test Instrumentsretrospect1000Ainda não há avaliações
- XtraVac Multihead Packaging Lines-LRDocumento5 páginasXtraVac Multihead Packaging Lines-LRMohammad SalamaAinda não há avaliações
- Experiment No9 Open Ended LabDocumento13 páginasExperiment No9 Open Ended Labwajiha khan0% (1)
- 12.turbulent Flow Jan 2015 PDFDocumento12 páginas12.turbulent Flow Jan 2015 PDFburhanuddinAinda não há avaliações
- Api Bottom Load ValveDocumento2 páginasApi Bottom Load ValveMạnh Ngô ĐứcAinda não há avaliações
- Honda GX 630 - 660 - 690Documento79 páginasHonda GX 630 - 660 - 690joao mariaAinda não há avaliações
- SN043a-EN-EU Design of Fixed Column Base JointsDocumento23 páginasSN043a-EN-EU Design of Fixed Column Base JointsCenascenascenascenasAinda não há avaliações
- Aluminium Using AFSDDocumento12 páginasAluminium Using AFSDKinesys TechsolutionsAinda não há avaliações
- Ep11450 E12 PDFDocumento9 páginasEp11450 E12 PDFWan WeiAinda não há avaliações
- Sp329a PRIMAAX EX For Mack HDT PDFDocumento6 páginasSp329a PRIMAAX EX For Mack HDT PDFJonathan Smith Vargas torresAinda não há avaliações
- Fan Application GuidelineDocumento6 páginasFan Application GuidelineEdward SabedraAinda não há avaliações
- Toyota Celica Wiring Diagram 1993Documento18 páginasToyota Celica Wiring Diagram 1993Gary Reynolds100% (2)
- 5 Desain CVDocumento5 páginas5 Desain CVInda Sela GifariAinda não há avaliações
- Sheet Metal OperationsDocumento27 páginasSheet Metal OperationsbmvinayAinda não há avaliações
- Lab 2 Torsion Lab Instruction SpringDocumento7 páginasLab 2 Torsion Lab Instruction SpringYong JinAinda não há avaliações
- F1440Documento6 páginasF1440Gustavo SuarezAinda não há avaliações
- Chapter 1 HeatDocumento10 páginasChapter 1 HeatJikni NobleAinda não há avaliações
- Shubham Gaikwad 163014 Seminar ReportDocumento21 páginasShubham Gaikwad 163014 Seminar ReportShubham GaikwadAinda não há avaliações
- Tokico P.D. Oil Flowmeter KatalogDocumento6 páginasTokico P.D. Oil Flowmeter KatalogPRIMA UTAMA MULYAAinda não há avaliações