Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- 1010 Tire ChangerDocumento4 páginas1010 Tire ChangerReyes Cesar33% (3)
- Oracle Exadata Technical Series: Smart ScanDocumento59 páginasOracle Exadata Technical Series: Smart ScanVishnusivathej PotukanumaAinda não há avaliações
- Trouble Codes C32Documento10 páginasTrouble Codes C32AliHabes100% (2)
- Chemical Induetries-1Documento75 páginasChemical Induetries-1Muhammad Anees Ur RehmanAinda não há avaliações
- Cover Letter Mechanical Engineering Nondestructive TestingDocumento1 páginaCover Letter Mechanical Engineering Nondestructive TestingGagandeep SinghAinda não há avaliações
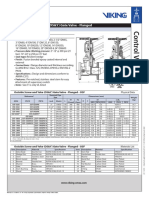
- Outside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesDocumento2 páginasOutside Screw and Yoke (OS&Y) Gate Valve - Flanged: Technical FeaturesMark Louie GuintoAinda não há avaliações
- Dse5510 Installation InstDocumento2 páginasDse5510 Installation Instricardo_dionisi2700Ainda não há avaliações
- 101.S-4501 Steamer Cyclone Cleaning ProcedureDocumento6 páginas101.S-4501 Steamer Cyclone Cleaning ProcedureTRONGKIMAinda não há avaliações
- Lab Gas FlowmeterDocumento7 páginasLab Gas Flowmeterazym94Ainda não há avaliações
- GeomediaDocumento37 páginasGeomediaEdilson MahumaneAinda não há avaliações
- Tpa3110D2-Q1 15-W Filter-Free Stereo Class-D Audio Power Amplifier With Speakerguard™Documento37 páginasTpa3110D2-Q1 15-W Filter-Free Stereo Class-D Audio Power Amplifier With Speakerguard™tran anh tuanAinda não há avaliações
- Saurabh ShrivastavaDocumento37 páginasSaurabh ShrivastavaMahendraAinda não há avaliações
- FD100 CatalogoDocumento4 páginasFD100 CatalogoKaren VásconezAinda não há avaliações
- Griet DSP ProgramsDocumento14 páginasGriet DSP ProgramsJaipaul CheernamAinda não há avaliações
- CPU SchedulingDocumento30 páginasCPU SchedulingHarsha OjhaAinda não há avaliações
- IA SeriesDocumento20 páginasIA Seriessina20795Ainda não há avaliações
- Epi Gear 1 PDFDocumento21 páginasEpi Gear 1 PDFTrevaughn ParkinsonAinda não há avaliações
- Case Study 11 Centralia Underground Mine FireDocumento11 páginasCase Study 11 Centralia Underground Mine Firemigire kennedyAinda não há avaliações
- OK Flux 231 (F7AZ-EL12) PDFDocumento2 páginasOK Flux 231 (F7AZ-EL12) PDFborovniskiAinda não há avaliações
- Motherboard Specifications, K8N8X-LA (Diablo) HP Pavilion T650.be Desktop PC - HP Customer Care (United States - English)Documento5 páginasMotherboard Specifications, K8N8X-LA (Diablo) HP Pavilion T650.be Desktop PC - HP Customer Care (United States - English)jpntjpntAinda não há avaliações
- Master Antenna Television System and Satellite SystemDocumento6 páginasMaster Antenna Television System and Satellite SystemMHEP_DANIELAinda não há avaliações
- Forming ProcessesDocumento8 páginasForming ProcessesKishor PatilAinda não há avaliações
- 048Documento6 páginas048kokykarkarAinda não há avaliações
- Grid Synchronization of Power Converters Using Multiple Second Order Generalized IntegratorsDocumento6 páginasGrid Synchronization of Power Converters Using Multiple Second Order Generalized IntegratorsJandfor Tansfg ErrottAinda não há avaliações
- DUNAN Fan Coil UnitDocumento14 páginasDUNAN Fan Coil UnitDjordjeAinda não há avaliações
- Calibration of The Calorimeter and HessDocumento7 páginasCalibration of The Calorimeter and HessazirAinda não há avaliações
- Product Catalogue: Your Specialist in Flow DrillingDocumento64 páginasProduct Catalogue: Your Specialist in Flow DrillingВасяAinda não há avaliações
- Final Thesis DATADocumento60 páginasFinal Thesis DATAdahaletushar75Ainda não há avaliações
- Surface Condenser Eng2Documento5 páginasSurface Condenser Eng2MuhammadFikriAinda não há avaliações
- Insulin, Recombinant HumanDocumento2 páginasInsulin, Recombinant HumanMuhammad AkramAinda não há avaliações