Você também pode gostar
- MRL FormDocumento4 páginasMRL FormaunngageAinda não há avaliações
- List of Companies Confirmed - VacanciesDocumento7 páginasList of Companies Confirmed - VacanciesFizaFiyAinda não há avaliações
- FYP Proporsal AfterDocumento25 páginasFYP Proporsal AfteraunngageAinda não há avaliações
- Chapter 2 MHIDocumento40 páginasChapter 2 MHIaunngageAinda não há avaliações
- Linear Algebra Damped SystemDocumento15 páginasLinear Algebra Damped SystemaunngageAinda não há avaliações
- Thesis Edited 18716 - WordsDocumento56 páginasThesis Edited 18716 - WordsaunngageAinda não há avaliações
- Chapter 1Documento113 páginasChapter 1aunngageAinda não há avaliações
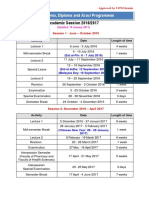
- Pre-Diploma, Diploma and Asasi Programmes: Academic Session 2016/2017Documento2 páginasPre-Diploma, Diploma and Asasi Programmes: Academic Session 2016/2017MhdNajmi97Ainda não há avaliações
- Materials Design6042010Documento24 páginasMaterials Design6042010aunngageAinda não há avaliações
- Welding Eng Lab GuidesDocumento15 páginasWelding Eng Lab Guideshilmiguyz91Ainda não há avaliações
- Cost OshaDocumento19 páginasCost OshaaunngageAinda não há avaliações
- I Ma DuDocumento1 páginaI Ma DuaunngageAinda não há avaliações
- Fyp DawsDocumento16 páginasFyp DawsaunngageAinda não há avaliações
- FYP 1 Presentation - SYED JDocumento19 páginasFYP 1 Presentation - SYED JaunngageAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5784)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- BX51WI/BX61WI Fixed Stage Upright MicroscopeDocumento8 páginasBX51WI/BX61WI Fixed Stage Upright MicroscopestreetcribdealerAinda não há avaliações
- General Relativity: Matthias Bartelmann Institut F Ur Theoretische Astrophysik Universit at HeidelbergDocumento196 páginasGeneral Relativity: Matthias Bartelmann Institut F Ur Theoretische Astrophysik Universit at HeidelbergparonimusAinda não há avaliações
- Weather ElementsDocumento6 páginasWeather ElementsFrenzie Mae Vasquez RiveraAinda não há avaliações
- Ringkasan Optimasi Formula Sediaan Sirup Mukolitik in (Hibiscus Rosa-Sinensis L.)Documento30 páginasRingkasan Optimasi Formula Sediaan Sirup Mukolitik in (Hibiscus Rosa-Sinensis L.)rahmi73Ainda não há avaliações
- MCR 3U5 CPT Part 2Documento4 páginasMCR 3U5 CPT Part 2Ronit RoyanAinda não há avaliações
- Roxtec Product Catalogue GB FI RU SE IT 2011 2012Documento252 páginasRoxtec Product Catalogue GB FI RU SE IT 2011 2012mmaleniAinda não há avaliações
- Design Charts for Bolts with Combined Shear and Tension ForcesDocumento4 páginasDesign Charts for Bolts with Combined Shear and Tension ForcescmkohAinda não há avaliações
- CUP IBChemistry c06 It Rates of ReactionsDocumento33 páginasCUP IBChemistry c06 It Rates of ReactionsAdnan ChowdhuryAinda não há avaliações
- Studies On Drying Kinetics of Solids in A Rotary DryerDocumento6 páginasStudies On Drying Kinetics of Solids in A Rotary DryerVinh Do ThanhAinda não há avaliações
- Gas Tur CatalogDocumento31 páginasGas Tur Catalogselvalntp100% (1)
- UP Diliman Course AssignmentsDocumento82 páginasUP Diliman Course Assignmentsgamingonly_accountAinda não há avaliações
- Toshiba Just Vision 200Documento2 páginasToshiba Just Vision 200kazugawa100% (4)
- Quincy Qrds Series Single-Stage, Oil-Less Reciprocating Air Compressors 2-30 HPDocumento8 páginasQuincy Qrds Series Single-Stage, Oil-Less Reciprocating Air Compressors 2-30 HPCoral IcmAinda não há avaliações
- Normal Distribution & Z-ScoresDocumento82 páginasNormal Distribution & Z-Scoresgela tinAinda não há avaliações
- MV Drop TestDocumento5 páginasMV Drop Testrajinipre-1Ainda não há avaliações
- Virial TheoremDocumento3 páginasVirial Theoremdodge_kevinAinda não há avaliações
- Bell Work : Graph The Following Equations. 1. 2Documento42 páginasBell Work : Graph The Following Equations. 1. 2lauhal63Ainda não há avaliações
- 01 - The Freerider Free Energy Inverter Rev 00DDocumento18 páginas01 - The Freerider Free Energy Inverter Rev 00Dpeterfoss791665Ainda não há avaliações
- PROBABILITY ANALYSISDocumento119 páginasPROBABILITY ANALYSISAnonymous bZtJlFvPtpAinda não há avaliações
- Astm D 2036-98 Standard Test Methods For Cyanides in Water PDFDocumento20 páginasAstm D 2036-98 Standard Test Methods For Cyanides in Water PDFGianinaRoncalChávezAinda não há avaliações
- 2018 Book FractographyAndFailureAnalysis PDFDocumento172 páginas2018 Book FractographyAndFailureAnalysis PDFDavid Casarrubias A100% (4)
- CE 437/537 Retaining Wall Design ExampleDocumento8 páginasCE 437/537 Retaining Wall Design ExampleJefferson Nobleza67% (3)
- Science - Book 10Documento312 páginasScience - Book 10Jaishree RamAinda não há avaliações
- Backdraft Response StrategiesDocumento6 páginasBackdraft Response StrategiesShan RaffelAinda não há avaliações
- The Evolution of Consciousness According to Bhagavad-GitaDocumento14 páginasThe Evolution of Consciousness According to Bhagavad-Gitatrabajo mpdAinda não há avaliações
- Time Temp Superposition With ExcelxDocumento4 páginasTime Temp Superposition With ExcelxdeepakAinda não há avaliações
- Channel Tut v1Documento11 páginasChannel Tut v1Umair IsmailAinda não há avaliações
- Effect of Degassing and Heat Treatment OnDocumento9 páginasEffect of Degassing and Heat Treatment OnSinan YıldızAinda não há avaliações
- Surgical Lights and Operating Table SeriesDocumento12 páginasSurgical Lights and Operating Table SeriesPABLO ZAMUDIOAinda não há avaliações
- M/M/1 Queues With Working Vacations (M/M/1/WV) : L.D. Servi, S.G. FinnDocumento12 páginasM/M/1 Queues With Working Vacations (M/M/1/WV) : L.D. Servi, S.G. FinnSadek AlaouiAinda não há avaliações