Você também pode gostar
- Magnetic Levitation: Physical System DescriptionDocumento5 páginasMagnetic Levitation: Physical System DescriptionKunal JainAinda não há avaliações
- Perturb and Observe Method MATLAB Simulink and Design of PV System Using Buck Boost ConverterDocumento5 páginasPerturb and Observe Method MATLAB Simulink and Design of PV System Using Buck Boost ConverterGss ChaitanyaAinda não há avaliações
- Point Method The Photovoltaic System: Novel Maximum Power Tracking ForDocumento5 páginasPoint Method The Photovoltaic System: Novel Maximum Power Tracking Forramalakshmi_apsAinda não há avaliações
- Design of An Antenna Azimuth Position Control SystemDocumento12 páginasDesign of An Antenna Azimuth Position Control SystemUche PaulAinda não há avaliações
- Designing of Solar PV Systems and Demonstration of Maximum Power Point Tracking (MPPT) Using MatlabDocumento17 páginasDesigning of Solar PV Systems and Demonstration of Maximum Power Point Tracking (MPPT) Using MatlabRasapalli DivyaAinda não há avaliações
- Sensorless Control PMSMDocumento5 páginasSensorless Control PMSMSandeep RaiAinda não há avaliações
- Maximum Power Point Tracking of DC To DC Boost Converter Using Sliding Mode ControlDocumento6 páginasMaximum Power Point Tracking of DC To DC Boost Converter Using Sliding Mode ControlInternational Organization of Scientific Research (IOSR)Ainda não há avaliações
- Fuzzy Control Based Solar Tracker Using Arduino Uno: ISO 9001:2008 CertifiedDocumento9 páginasFuzzy Control Based Solar Tracker Using Arduino Uno: ISO 9001:2008 CertifiedDavidleonardo GalindoAinda não há avaliações
- Sumanth 9Documento13 páginasSumanth 9Chenchu TnvAinda não há avaliações
- Sun Tracking Solar PanelDocumento11 páginasSun Tracking Solar PaneldanAinda não há avaliações
- Zeta Converter For PV Applications Employing MPPTDocumento7 páginasZeta Converter For PV Applications Employing MPPTarattupuzhaAinda não há avaliações
- Implementation of A DSP-Controlled Photovoltaic System With Peak Power TrackingDocumento9 páginasImplementation of A DSP-Controlled Photovoltaic System With Peak Power Trackingjs_junior07Ainda não há avaliações
- FinalDocumento16 páginasFinalTECH INNOVATIONSAinda não há avaliações
- Maximum Power Point Tracking Using Modified Incremental Conductance For Solar Photovoltaic SystemDocumento5 páginasMaximum Power Point Tracking Using Modified Incremental Conductance For Solar Photovoltaic SystemHaymanot LegesseAinda não há avaliações
- Light Tracking Servo System: Projects For StudentsDocumento13 páginasLight Tracking Servo System: Projects For StudentssirfabdulAinda não há avaliações
- Design and Implementation of Photo Voltaic System With Soft Switched Boost Converter Using Analog Fuzzy Based MPPTDocumento7 páginasDesign and Implementation of Photo Voltaic System With Soft Switched Boost Converter Using Analog Fuzzy Based MPPTskrtamilAinda não há avaliações
- Gobind KSR Conf PaperDocumento7 páginasGobind KSR Conf PaperRagul DuraisamyAinda não há avaliações
- Microcontroller-Based Boost ConverterDocumento10 páginasMicrocontroller-Based Boost ConverterDevendra DwivdiAinda não há avaliações
- Paper 04Documento6 páginasPaper 04Md ShafiullahAinda não há avaliações
- Microcontroller Based Semiconductor Tap Changer For Power transfarmer-ROUGHDocumento16 páginasMicrocontroller Based Semiconductor Tap Changer For Power transfarmer-ROUGHdattasriAinda não há avaliações
- Optimization of MPPT Step Si in Stand-Alone Solar Pumping SystemsDocumento6 páginasOptimization of MPPT Step Si in Stand-Alone Solar Pumping SystemssunitharajababuAinda não há avaliações
- M.tech ThesisDocumento59 páginasM.tech ThesisRama Krishna100% (1)
- AN296110 Current Sensing For Renewable EnergyDocumento4 páginasAN296110 Current Sensing For Renewable EnergyPhạm Văn TưởngAinda não há avaliações
- PLECS-piece-wise Linear Electrical Circuit Simulation For SimulinkDocumento6 páginasPLECS-piece-wise Linear Electrical Circuit Simulation For Simulink曾乙申Ainda não há avaliações
- Investigation of Three-Phase Grid-Connected Inverter For Photovoltaic ApplicationDocumento6 páginasInvestigation of Three-Phase Grid-Connected Inverter For Photovoltaic ApplicationAmran MaulanaAinda não há avaliações
- Comparative Study of P&O and Inc MPPT AlgorithmsDocumento7 páginasComparative Study of P&O and Inc MPPT AlgorithmsAJER JOURNALAinda não há avaliações
- Chapter 3Documento9 páginasChapter 3jahanviAinda não há avaliações
- Department of Electronics & Communication: Aharaja Institute of Technology MysoreDocumento8 páginasDepartment of Electronics & Communication: Aharaja Institute of Technology MysoreVinayaka KadampurAinda não há avaliações
- Maglev Exp 03Documento20 páginasMaglev Exp 03Uditha MuthumalaAinda não há avaliações
- Maximum Power Point Tracking - National InstrumentsDocumento7 páginasMaximum Power Point Tracking - National Instrumentsrosy01710Ainda não há avaliações
- Comparison of MPPT Strategies For Solar Modules: AbstractDocumento6 páginasComparison of MPPT Strategies For Solar Modules: AbstractbensumbbAinda não há avaliações
- Intelligent Fire Detector With Automatic Water Sprinkler System To Avoid Fire AccidentsDocumento11 páginasIntelligent Fire Detector With Automatic Water Sprinkler System To Avoid Fire Accidentssk THOUFIQAinda não há avaliações
- Model of The Electromagnetic Levitation Device Tomáš HronDocumento6 páginasModel of The Electromagnetic Levitation Device Tomáš Hron9428625409Ainda não há avaliações
- 244 1 AhmedSalmanDocumento8 páginas244 1 AhmedSalmanSalman AhmedAinda não há avaliações
- Battery Management System (BMS) EE401 Final ReportDocumento26 páginasBattery Management System (BMS) EE401 Final ReportOzgur M. DumanAinda não há avaliações
- What Is The Scope of Electrical EngineeringDocumento9 páginasWhat Is The Scope of Electrical EngineeringMahesh NidumoluAinda não há avaliações
- 2208EE006.ourside - GridsystemDocumento6 páginas2208EE006.ourside - GridsystemssAinda não há avaliações
- Voltage Stability With The Help of STATCOMDocumento6 páginasVoltage Stability With The Help of STATCOMijsretAinda não há avaliações
- Grid Connected PV SystemDocumento9 páginasGrid Connected PV SystemHumayun AhsanAinda não há avaliações
- lm3524 PWM PDFDocumento8 páginaslm3524 PWM PDFIon MoldoveanuAinda não há avaliações
- Djagarov EEEIC 2012Documento6 páginasDjagarov EEEIC 2012jagarov4954Ainda não há avaliações
- Unit - 5 NotesDocumento31 páginasUnit - 5 NotesSujit KumarAinda não há avaliações
- Application of PI and MPPT Controller To DC-DC ConDocumento9 páginasApplication of PI and MPPT Controller To DC-DC ConwafaAinda não há avaliações
- Development of Improved Incremental Conductance For MPPT in Solar Photovoltaic SystemDocumento2 páginasDevelopment of Improved Incremental Conductance For MPPT in Solar Photovoltaic SystemulaganathanAinda não há avaliações
- Modeling and Dynamic Response Simulation of Gto-Based StatcomDocumento4 páginasModeling and Dynamic Response Simulation of Gto-Based StatcomSadaf AnjumAinda não há avaliações
- Solar MPPTDocumento16 páginasSolar MPPTKiran ZoroAinda não há avaliações
- Design and Development of Maximum Power Point Tracking (MPPT) For 100 Watt Solar Panel Base On Buck Boost ConverterDocumento10 páginasDesign and Development of Maximum Power Point Tracking (MPPT) For 100 Watt Solar Panel Base On Buck Boost ConverterOle Johan BondahlAinda não há avaliações
- Concept Paper EditedDocumento7 páginasConcept Paper EditedJr BongabongAinda não há avaliações
- Practical Guide MPPTDocumento16 páginasPractical Guide MPPTgubiliAinda não há avaliações
- Soft Switching Boost Converter With MPPT For Solar (1) 2233Documento29 páginasSoft Switching Boost Converter With MPPT For Solar (1) 2233satheesh_240Ainda não há avaliações
- A Maximum Power Point Tracking Technique For Partially Shaded Photovoltaic Systems in MicrogridsDocumento11 páginasA Maximum Power Point Tracking Technique For Partially Shaded Photovoltaic Systems in MicrogridsRam KumarAinda não há avaliações
- Publisher in ResearchDocumento8 páginasPublisher in Researchrikaseo rikaAinda não há avaliações
- Design and Analysis of A Practical Three-Phase Grid-Connected Photovoltaic InverterDocumento5 páginasDesign and Analysis of A Practical Three-Phase Grid-Connected Photovoltaic InverterAhmed RefaatAinda não há avaliações
- A Practical Demonstration For Simultaneous Suspension and Rotation For A Ferromagnetic Object-An Application of DC Electromagnetic LevitationDocumento5 páginasA Practical Demonstration For Simultaneous Suspension and Rotation For A Ferromagnetic Object-An Application of DC Electromagnetic LevitationDr-Mrinal Kanti SarkarAinda não há avaliações
- Maximum Power Point Tracking (MPPT) Dengan Konverter DC-DC Tipe CukDocumento9 páginasMaximum Power Point Tracking (MPPT) Dengan Konverter DC-DC Tipe CukDeDek MuktianToAinda não há avaliações
- Unit 1Documento8 páginasUnit 1ChhaviAinda não há avaliações
- Buck-Converter Photovoltaic Simulator: International Journal of Power Electronics and Drive System (IJPEDS)Documento12 páginasBuck-Converter Photovoltaic Simulator: International Journal of Power Electronics and Drive System (IJPEDS)Hiren PatelAinda não há avaliações
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNota: 2 de 5 estrelas2/5 (1)
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetAinda não há avaliações
- Simulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorNo EverandSimulation of Some Power System, Control System and Power Electronics Case Studies Using Matlab and PowerWorld SimulatorAinda não há avaliações
- GSL Hi-Temp Operation Manual-0217-Gl - Tube FurnaceDocumento36 páginasGSL Hi-Temp Operation Manual-0217-Gl - Tube FurnacehcaAinda não há avaliações
- Power Plant Manual 1Documento8 páginasPower Plant Manual 1Khoirul WaladAinda não há avaliações
- Comparison of Voltage Control Methods in Distribution Systems Using Q-V Based PI and Droop Controls of Solar InvertersDocumento5 páginasComparison of Voltage Control Methods in Distribution Systems Using Q-V Based PI and Droop Controls of Solar Invertersmirko.tAinda não há avaliações
- Managing Information TechnologyDocumento18 páginasManaging Information TechnologyLaurice NeriAinda não há avaliações
- Book 5: Magnetcode For 2-Axis Robot ArmDocumento41 páginasBook 5: Magnetcode For 2-Axis Robot ArmHusna AdilaAinda não há avaliações
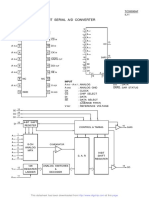
- C-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DODocumento1 páginaC-Mos 8-Channel 8-Bit Serial A/D Converter: 9 7 6 5 4 3 2 1 A A A A A A A A 15 DOAsep TatangAinda não há avaliações
- Manual ETANK2000Documento73 páginasManual ETANK2000Ever BriceñoAinda não há avaliações
- Bridge PPTDocumento74 páginasBridge PPTKarthi ChowdaryAinda não há avaliações
- Math Lecture 1Documento37 páginasMath Lecture 1Mohamed A. TaherAinda não há avaliações
- Surpac ReportingDocumento4 páginasSurpac ReportingDelfidelfi SatuAinda não há avaliações
- GraphQL With React The Complete Developers GuideDocumento12 páginasGraphQL With React The Complete Developers GuideswadhincyberAinda não há avaliações
- Confidentiality Agreement TemplateDocumento2 páginasConfidentiality Agreement TemplateJulie BarramedaAinda não há avaliações
- 2 - Site Crisis Management Plan TemplateDocumento42 páginas2 - Site Crisis Management Plan Templatesentryx1100% (7)
- Internsship - Project - Arjun Singh FinalDocumento78 páginasInternsship - Project - Arjun Singh FinalAnmol DubeyAinda não há avaliações
- Dav DZ340 PDFDocumento92 páginasDav DZ340 PDFCurtoAVidaAinda não há avaliações
- Market Basket AnalysisDocumento15 páginasMarket Basket AnalysisAkanksha KadamAinda não há avaliações
- Hci RCHSD Capstone PresentationDocumento2 páginasHci RCHSD Capstone Presentationapi-583841034Ainda não há avaliações
- SGRDocumento18 páginasSGRMunimAinda não há avaliações
- REspuestas Quiz CP4AUTOMATIONDocumento10 páginasREspuestas Quiz CP4AUTOMATIONMax Lee100% (1)
- Cyinder Track CalculatorDocumento3 páginasCyinder Track CalculatorSpockCritical CriticalAinda não há avaliações
- B-Line CTME-13Documento284 páginasB-Line CTME-13Leizer LipaAinda não há avaliações
- Soft-Switching Bidirectional DC-DC Converter Using A Lossless Active SnubberDocumento9 páginasSoft-Switching Bidirectional DC-DC Converter Using A Lossless Active SnubberHsekum RamukAinda não há avaliações
- Wireshark EthernetDocumento7 páginasWireshark EthernetCherryAinda não há avaliações
- Irfiz 34 NDocumento8 páginasIrfiz 34 NBase de DatosAinda não há avaliações
- ProxySG 600 Quick Start GuideDocumento2 páginasProxySG 600 Quick Start GuideCrystal WheelerAinda não há avaliações
- WDM Important Questions 1Documento3 páginasWDM Important Questions 1PinkAinda não há avaliações
- MC Line: Multifunction Three Phase Overvoltage / Undervoltage RelayDocumento3 páginasMC Line: Multifunction Three Phase Overvoltage / Undervoltage RelayCerduardo Chanchisco Roga RojasAinda não há avaliações
- BEKO L6B PDP Service ManualDocumento121 páginasBEKO L6B PDP Service Manualvideoson100% (2)
- CustomPC 2023-2 PDFDocumento100 páginasCustomPC 2023-2 PDFTavimmmmmAinda não há avaliações
- Audit Program TempleteDocumento3 páginasAudit Program TempleteKudakwashe ChiwunyaAinda não há avaliações