Você também pode gostar
- Planar Linkage Synthesis: A modern CAD based approachNo EverandPlanar Linkage Synthesis: A modern CAD based approachAinda não há avaliações
- Robust Active Stereo CalibrationDocumento8 páginasRobust Active Stereo Calibrationqiaowen wangAinda não há avaliações
- Unit IiDocumento37 páginasUnit IiDamotharan Sathesh KumarAinda não há avaliações
- Finite Element Analysis for Design Engineers, Second EditionNo EverandFinite Element Analysis for Design Engineers, Second EditionAinda não há avaliações
- 1 s2.0 S102630981200140X MainDocumento12 páginas1 s2.0 S102630981200140X Mainamira khaldiAinda não há avaliações
- BTM3134 Week 1 IntroductionDocumento19 páginasBTM3134 Week 1 IntroductionAswaja313Ainda não há avaliações
- Timoshenko Versus Euler-Bernoulli Beam Theories For High Speed Two-Link ManipulatorDocumento7 páginasTimoshenko Versus Euler-Bernoulli Beam Theories For High Speed Two-Link ManipulatorDUNAinda não há avaliações
- Kinematics Modeling of Redundant ManipulatorDocumento7 páginasKinematics Modeling of Redundant ManipulatorHung Nguyen-CongAinda não há avaliações
- Week 11 - Dynamic Motion Simulation - Lecture Presentation PDFDocumento40 páginasWeek 11 - Dynamic Motion Simulation - Lecture Presentation PDFMinh Hai LuuAinda não há avaliações
- 1 s2.0 S0022460X15010512 Main PDFDocumento12 páginas1 s2.0 S0022460X15010512 Main PDFpalash22Ainda não há avaliações
- ANSYS MPC Dynamics Page 1 PDFDocumento1 páginaANSYS MPC Dynamics Page 1 PDFnotonectalAinda não há avaliações
- Forward Kinematics and Workspace Analysis of 6DOF Manipulator Arm Applied On Lab VIEWDocumento12 páginasForward Kinematics and Workspace Analysis of 6DOF Manipulator Arm Applied On Lab VIEWOm MishraAinda não há avaliações
- Crank and Slotted Lever Quick Return (Rev2)Documento9 páginasCrank and Slotted Lever Quick Return (Rev2)Vipin YadavAinda não há avaliações
- PDF Dynamics of MACHINERY PDFDocumento469 páginasPDF Dynamics of MACHINERY PDFFarhan Ali RabbaniAinda não há avaliações
- Robot Dynamics: 1 DefinitionDocumento6 páginasRobot Dynamics: 1 Definitionalagar krishna kumarAinda não há avaliações
- Analytical Method For Velocity Analysis of Simple and Compound Mechanisms Using Simple TrigonometryDocumento6 páginasAnalytical Method For Velocity Analysis of Simple and Compound Mechanisms Using Simple TrigonometryAmit MondalAinda não há avaliações
- ME0022 Dynamics: L4, L5 2D Kinematics of A Rigid BodyDocumento17 páginasME0022 Dynamics: L4, L5 2D Kinematics of A Rigid BodyKevin SacaAinda não há avaliações
- Rotordynamic Capabilities in ANSYS Mechanical PDFDocumento3 páginasRotordynamic Capabilities in ANSYS Mechanical PDFFarzad SadrAinda não há avaliações
- Kom Mod4@Azdocuments - inDocumento19 páginasKom Mod4@Azdocuments - inM. Sadiq. A. PachapuriAinda não há avaliações
- Kom Mod4@Azdocuments - inDocumento19 páginasKom Mod4@Azdocuments - inM. Sadiq. A. PachapuriAinda não há avaliações
- Robot Mekanik HesaplamalarDocumento33 páginasRobot Mekanik HesaplamalarMurat ToprakAinda não há avaliações
- Robot Kinematics: Forward and Inverse Kinematics: December 2006Documento33 páginasRobot Kinematics: Forward and Inverse Kinematics: December 2006Murat ToprakAinda não há avaliações
- Chapter Objectives: Planar Rigid-Body MotionDocumento15 páginasChapter Objectives: Planar Rigid-Body MotionvenkatAinda não há avaliações
- 1 s2.0 S0301679X22003267 MainDocumento12 páginas1 s2.0 S0301679X22003267 MainDobrescu Morariu MirceaAinda não há avaliações
- Duart 2017 J. Phys.: Conf. Ser. 792 012081 PDFDocumento18 páginasDuart 2017 J. Phys.: Conf. Ser. 792 012081 PDFnick_mafraAinda não há avaliações
- InTech-Robot Kinematics Forward and Inverse KinematicsDocumento34 páginasInTech-Robot Kinematics Forward and Inverse KinematicsMurat ToprakAinda não há avaliações
- Dynamic Flexible Root Rot Beam PDFDocumento19 páginasDynamic Flexible Root Rot Beam PDFNour AtiehAinda não há avaliações
- Li 2014Documento6 páginasLi 2014Behzad DanaeiAinda não há avaliações
- 456-Math 45781 d1Documento20 páginas456-Math 45781 d1NAVINTHIRANPILLAY A/L VEERASAMY / UPMAinda não há avaliações
- 3.0 Wrap Up and SummaryDocumento4 páginas3.0 Wrap Up and SummaryGian SanchezAinda não há avaliações
- Energy Analysis To The Design of Rotor Bearing Systems LinkedDocumento9 páginasEnergy Analysis To The Design of Rotor Bearing Systems LinkedEbrahim ZolfagharyAinda não há avaliações
- 4.0 Wrap Up and SummaryDocumento8 páginas4.0 Wrap Up and SummaryGian SanchezAinda não há avaliações
- 3004lecture 1 HandoutDocumento69 páginas3004lecture 1 HandoutPhil SUNAinda não há avaliações
- Module 6Documento218 páginasModule 6Uwan KivinduAinda não há avaliações
- Basic Kinematic ConceptsDocumento33 páginasBasic Kinematic ConceptsMark Niño JavierAinda não há avaliações
- Flows With Moving and Rotating Objects: Beyond Viscosity - Lesson 4Documento17 páginasFlows With Moving and Rotating Objects: Beyond Viscosity - Lesson 4Vijay NarayanAinda não há avaliações
- Dynamics FormulasDocumento3 páginasDynamics FormulasAbule The greatAinda não há avaliações
- Experiment4 Group3Documento43 páginasExperiment4 Group3debojit.dasAinda não há avaliações
- Buckling Analysis With Inertia Relief - Finite Element Analysis (FEA) Engineering - Eng-TipsDocumento4 páginasBuckling Analysis With Inertia Relief - Finite Element Analysis (FEA) Engineering - Eng-TipsgbendiniAinda não há avaliações
- An Effective Pseudo-Rigid-Body Method For Beam-Based Compliant MechanismsDocumento6 páginasAn Effective Pseudo-Rigid-Body Method For Beam-Based Compliant Mechanismsalio safarAinda não há avaliações
- Elastic FramesDocumento9 páginasElastic FramesKaikô GatesAinda não há avaliações
- Mech-Iv-Kinematics of Machines (10me44) - Notes PDFDocumento196 páginasMech-Iv-Kinematics of Machines (10me44) - Notes PDFgopalAinda não há avaliações
- Degree o FreedomDocumento27 páginasDegree o FreedomHassan BhinderAinda não há avaliações
- Pre IX Physics Federal 2 Kinematics 2022 23Documento9 páginasPre IX Physics Federal 2 Kinematics 2022 23ranilaiba763Ainda não há avaliações
- DoM Lecture 01 PDFDocumento61 páginasDoM Lecture 01 PDFZia Ur RehmanAinda não há avaliações
- Analysis and Simulation of Gearless Transmission Mechanism1Documento8 páginasAnalysis and Simulation of Gearless Transmission Mechanism1ganeshAinda não há avaliações
- Kinematics of Machinery - 2 Marks - All 5 UnitsDocumento18 páginasKinematics of Machinery - 2 Marks - All 5 UnitsMohan Prasad.M94% (16)
- Preared By: Dr. J. N. KERAITA: Emg 2404: Mechanics of Machines IiiDocumento9 páginasPreared By: Dr. J. N. KERAITA: Emg 2404: Mechanics of Machines IiiMuthoka VincentAinda não há avaliações
- Design of Loop Wheel Suspension SystemDocumento7 páginasDesign of Loop Wheel Suspension SystemInternational Journal of Innovations in Engineering and Science50% (2)
- Engineering Mechanics - An Introduction To Dynamics 4th Ed PDFDocumento646 páginasEngineering Mechanics - An Introduction To Dynamics 4th Ed PDFRandom Person100% (2)
- Basic Kinematic ConceptsDocumento33 páginasBasic Kinematic Conceptsinkheartkat100% (1)
- 1 s2.0 S0307904X2200453X MainDocumento22 páginas1 s2.0 S0307904X2200453X MainjavierAinda não há avaliações
- Robot Dynamics: Scholarpedia Is Supported by Brain CorporationDocumento6 páginasRobot Dynamics: Scholarpedia Is Supported by Brain Corporationalagar krishna kumarAinda não há avaliações
- ForwardandInverseKinematicAnalysisofRoboticManipulatorsIRJET V4I2286 PDFDocumento11 páginasForwardandInverseKinematicAnalysisofRoboticManipulatorsIRJET V4I2286 PDFAshar HaroonAinda não há avaliações
- 6 DynamicsDocumento93 páginas6 Dynamicsmurada_7Ainda não há avaliações
- Workshop Note On Pushover AnalysisDocumento97 páginasWorkshop Note On Pushover AnalysisAnonymous xC6bM4x6U6100% (2)
- Gerst Mayr 2013Documento12 páginasGerst Mayr 2013Jarvis BlueAinda não há avaliações
- Mechanics of Machines: DR Tuan Mohammad Yusoff ShahDocumento31 páginasMechanics of Machines: DR Tuan Mohammad Yusoff ShahSuthan Muthu KrisnanAinda não há avaliações
- Mech Timetable 2017-18 Year 3 Semester 1Documento1 páginaMech Timetable 2017-18 Year 3 Semester 1Kunal RamnatsingAinda não há avaliações
- Tutorial 1 Review of Mechanics 1 QuestionsDocumento1 páginaTutorial 1 Review of Mechanics 1 QuestionsKunal RamnatsingAinda não há avaliações
- Tutorial 6 and 7 Failure Theories QuestionsDocumento1 páginaTutorial 6 and 7 Failure Theories QuestionsKunal RamnatsingAinda não há avaliações
- Tutorial 2 Complex Stress and Stress Transformation QuestionsDocumento1 páginaTutorial 2 Complex Stress and Stress Transformation QuestionsKunal RamnatsingAinda não há avaliações
- Tutorial 8 Castigliano QuestionsDocumento2 páginasTutorial 8 Castigliano QuestionsKunal RamnatsingAinda não há avaliações
- Workshop Four (W04) : Melbourne School of Engineering Engineering Systems Design 2Documento10 páginasWorkshop Four (W04) : Melbourne School of Engineering Engineering Systems Design 2Kunal RamnatsingAinda não há avaliações
- DAQ Crosshead, (Timed)Documento27 páginasDAQ Crosshead, (Timed)Kunal RamnatsingAinda não há avaliações
- Tutorial 8 Castigliano QuestionsDocumento2 páginasTutorial 8 Castigliano QuestionsKunal RamnatsingAinda não há avaliações
- New Microsoft Excel WorksheetDocumento2 páginasNew Microsoft Excel WorksheetKunal RamnatsingAinda não há avaliações
- Engineering Mathematics I - Solutions 5Documento4 páginasEngineering Mathematics I - Solutions 5Kunal RamnatsingAinda não há avaliações
- Engineering Mathematics I Multiple ChoiceDocumento6 páginasEngineering Mathematics I Multiple ChoiceKunal RamnatsingAinda não há avaliações
- h22hg2 Ps5 SolDocumento3 páginash22hg2 Ps5 SolKunal RamnatsingAinda não há avaliações
- FourierDocumento22 páginasFourierKunal RamnatsingAinda não há avaliações
- Conrod Design LectureDocumento3 páginasConrod Design Lecturepl82Ainda não há avaliações
- School of Civil Engineering: DR Matthew Scase H22 HG2Documento4 páginasSchool of Civil Engineering: DR Matthew Scase H22 HG2Kunal RamnatsingAinda não há avaliações
- Lecture 16 - Stress and StrainDocumento4 páginasLecture 16 - Stress and StrainKunal RamnatsingAinda não há avaliações
- Maclaurin and Taylor Series A Lecture SummaryDocumento2 páginasMaclaurin and Taylor Series A Lecture SummaryKunal RamnatsingAinda não há avaliações
- Laminate Modeller WorkbookDocumento45 páginasLaminate Modeller WorkbookLan T NguyenAinda não há avaliações
- THERMODYNAMICS - Course OutlineDocumento2 páginasTHERMODYNAMICS - Course OutlineNduati JohnAinda não há avaliações
- On Some Modifications of Kinematic Hardening To Improve The Description of Ratchetting EffectsDocumento18 páginasOn Some Modifications of Kinematic Hardening To Improve The Description of Ratchetting Effectssirsong1234Ainda não há avaliações
- NSK Bearing PreloadDocumento2 páginasNSK Bearing PreloadYasser MahmoudAinda não há avaliações
- Solution Electromagnetic Field Wangsness Chap 19 Selected NumberDocumento7 páginasSolution Electromagnetic Field Wangsness Chap 19 Selected Numbernimamega100% (2)
- 1.1.3.a.vex - Ak GearsDocumento6 páginas1.1.3.a.vex - Ak GearsNaigel BennettAinda não há avaliações
- Braced RC Circular Column Design - Sample Calculation (As 3600)Documento5 páginasBraced RC Circular Column Design - Sample Calculation (As 3600)Tiam MarapeAinda não há avaliações
- Basic Machine Design Situational Problem by Alcorcon 1Documento170 páginasBasic Machine Design Situational Problem by Alcorcon 1Richard YapAinda não há avaliações
- The Structure of Vortex BreakdownDocumento26 páginasThe Structure of Vortex BreakdownMaiman LatoAinda não há avaliações
- Geotechnical EngineeringDocumento48 páginasGeotechnical EngineeringSupritha KAinda não há avaliações
- Electric Charges and Field 1Documento2 páginasElectric Charges and Field 1raghav sharmaAinda não há avaliações
- CURVILINEARDocumento25 páginasCURVILINEARSheena Abegail LaderaAinda não há avaliações
- Fundamentals of S Lay and Engineering Analysis Using OFFPIPE GEP PDFDocumento98 páginasFundamentals of S Lay and Engineering Analysis Using OFFPIPE GEP PDFolalekan100% (1)
- Radhwa International School Test Paper: Class 09 - ScienceDocumento7 páginasRadhwa International School Test Paper: Class 09 - ScienceahmadAinda não há avaliações
- Javadi, Sadegh - Investigation of Open-Channel Design of Non-Newtonian Thickened Tailings FlowDocumento9 páginasJavadi, Sadegh - Investigation of Open-Channel Design of Non-Newtonian Thickened Tailings FlowsapoAinda não há avaliações
- Projectile PacketDocumento17 páginasProjectile PacketRusherAinda não há avaliações
- Mekanika Kekuatan Material - Kul 1Documento23 páginasMekanika Kekuatan Material - Kul 1lia tyyanAinda não há avaliações
- Analysis For Creep Shrinkage and Temperature Effects On Expansio PDFDocumento320 páginasAnalysis For Creep Shrinkage and Temperature Effects On Expansio PDFRaviteja KilaparthiAinda não há avaliações
- Quest 8 ProblemsDocumento2 páginasQuest 8 ProblemsAdmnUnpwndAinda não há avaliações
- TQ 4th ScienceDocumento2 páginasTQ 4th ScienceJestoni AmbrocioAinda não há avaliações
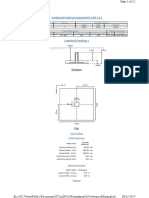
- Isolated Footing Design (ACI 318-11) : ElevationDocumento12 páginasIsolated Footing Design (ACI 318-11) : ElevationAhmed Ben HmidaAinda não há avaliações
- Chequered PlateDocumento23 páginasChequered Platesaravanan428680% (10)
- Aceleración de CoriolisDocumento17 páginasAceleración de CoriolisDavidBecerraAinda não há avaliações
- S06-All Examples 2upDocumento5 páginasS06-All Examples 2upAvinash MeenaAinda não há avaliações
- LMS Samcef Solver Suite: Enabling You To Accurately Describe and Model The Physical Behavior of Structures and MechanismsDocumento3 páginasLMS Samcef Solver Suite: Enabling You To Accurately Describe and Model The Physical Behavior of Structures and MechanismsbrufpotAinda não há avaliações
- 5.2 Crack ControlDocumento54 páginas5.2 Crack Controltmusiomi100% (1)
- Classical and Statistical Thermodynamics, CarterDocumento448 páginasClassical and Statistical Thermodynamics, CarterAnonymous nXG9nYO72% (29)
- Kinematics TestDocumento13 páginasKinematics TestJason YuAinda não há avaliações
- MODULE1 - 134 Prents 1 1 3 PDFDocumento113 páginasMODULE1 - 134 Prents 1 1 3 PDFAlesther Mariano100% (1)