Você também pode gostar
- Lista 1 - FOOO PDFDocumento6 páginasLista 1 - FOOO PDFLucas JordãoAinda não há avaliações
- Aula23 CSL PDFDocumento17 páginasAula23 CSL PDFLucas JordãoAinda não há avaliações
- Aula22 CSLDocumento24 páginasAula22 CSLAlex_sfAinda não há avaliações
- Aula13 CSL PDFDocumento21 páginasAula13 CSL PDFLucas JordãoAinda não há avaliações
- Aula8 CSL PDFDocumento18 páginasAula8 CSL PDFLucas JordãoAinda não há avaliações
- Aula18 CSL PDFDocumento21 páginasAula18 CSL PDFLucas JordãoAinda não há avaliações
- Aula20 CSL PDFDocumento21 páginasAula20 CSL PDFLucas JordãoAinda não há avaliações
- Aula16 CSL PDFDocumento17 páginasAula16 CSL PDFLucas JordãoAinda não há avaliações
- Aula19 CSLDocumento14 páginasAula19 CSLirismoraesAinda não há avaliações
- Aula21 CSLDocumento28 páginasAula21 CSLJeferson FraytagAinda não há avaliações
- Aula3 CSLDocumento29 páginasAula3 CSLfukinhaAinda não há avaliações
- Aula14 CSLDocumento18 páginasAula14 CSLMauri GauerAinda não há avaliações
- Aula2 CSL PDFDocumento26 páginasAula2 CSL PDFLucas JordãoAinda não há avaliações
- Aula9 CSL PDFDocumento28 páginasAula9 CSL PDFLucas JordãoAinda não há avaliações
- Aula17 CSL PDFDocumento4 páginasAula17 CSL PDFLucas JordãoAinda não há avaliações
- Rl2455hm ManualusuarioDocumento49 páginasRl2455hm ManualusuarioLucas JordãoAinda não há avaliações
- Aula12 CSL PDFDocumento30 páginasAula12 CSL PDFLucas JordãoAinda não há avaliações
- Aula11 CSL PDFDocumento13 páginasAula11 CSL PDFLucas JordãoAinda não há avaliações
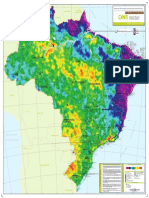
- Mapa de densidade de descargas atmosféricas 1998-2013Documento1 páginaMapa de densidade de descargas atmosféricas 1998-2013Lucas JordãoAinda não há avaliações
- Aula7 CSL PDFDocumento27 páginasAula7 CSL PDFLucas JordãoAinda não há avaliações
- RouthDocumento22 páginasRouthAdriano Francisco PedroAinda não há avaliações
- Aula10 CSL PDFDocumento23 páginasAula10 CSL PDFLucas JordãoAinda não há avaliações
- Aula1 CSL PDFDocumento18 páginasAula1 CSL PDFLucas JordãoAinda não há avaliações
- Lista 8 PDFDocumento1 páginaLista 8 PDFLucas JordãoAinda não há avaliações
- Aula0 CSLDocumento21 páginasAula0 CSLisaacAinda não há avaliações
- 3 Planejamento Energético - Uma Visão GeralDocumento15 páginas3 Planejamento Energético - Uma Visão GeralLucas JordãoAinda não há avaliações
- Projeto de Um SPDADocumento122 páginasProjeto de Um SPDADaniel SantanaAinda não há avaliações
- NBR 10067 - Principios Gerais de Representação de Desenhos TecnicosDocumento14 páginasNBR 10067 - Principios Gerais de Representação de Desenhos TecnicosAdriano Gaio0% (1)
- NBR 10067 - Principios Gerais de Representação de Desenhos TecnicosDocumento14 páginasNBR 10067 - Principios Gerais de Representação de Desenhos TecnicosAdriano Gaio0% (1)
- Informática INSS e MPUDocumento1 páginaInformática INSS e MPUMarilene SilvaAinda não há avaliações
- Catalogo Transformadores Rio PretoDocumento15 páginasCatalogo Transformadores Rio PretoEgon SchurtAinda não há avaliações
- Monitoramento de equipamentos NovusDocumento3 páginasMonitoramento de equipamentos NovusFernando FranzoAinda não há avaliações
- Lista de Exercicios Trafo TriDocumento5 páginasLista de Exercicios Trafo TriNiihlkAinda não há avaliações
- Termo de Abertura do Projeto TAPDocumento9 páginasTermo de Abertura do Projeto TAPjuanfagnerAinda não há avaliações
- Apostila Redes de ComputadoresDocumento76 páginasApostila Redes de ComputadoresNirlândio OliveiraAinda não há avaliações
- Catalogo de Controle de MoendasDocumento2 páginasCatalogo de Controle de MoendasdjunalAinda não há avaliações
- Tendências do comércio eletrônico e requisitos de lojas virtuaisDocumento9 páginasTendências do comércio eletrônico e requisitos de lojas virtuaisZé de LucasAinda não há avaliações
- Sany 135Documento11 páginasSany 135karol1177100% (2)
- Aula 1 - Lógica de ProgramaçãoDocumento34 páginasAula 1 - Lógica de ProgramaçãoYan PinheiroAinda não há avaliações
- Comunica Cao e Lingua GemDocumento192 páginasComunica Cao e Lingua GemVinícius MoreiraAinda não há avaliações
- Sistemas Mes PDFDocumento9 páginasSistemas Mes PDFLuccas AmaralAinda não há avaliações
- Manual Informatica BackupDocumento31 páginasManual Informatica BackupFabinho BrandãoAinda não há avaliações
- Amostra Lista de Empresas Do Rio de JaneiroDocumento11 páginasAmostra Lista de Empresas Do Rio de JaneiroRoberta MelloAinda não há avaliações
- Guia de especificação para elevador residencial EL2000Documento8 páginasGuia de especificação para elevador residencial EL2000elapsaAinda não há avaliações
- Circuitos de Lógica CabeadaDocumento21 páginasCircuitos de Lógica CabeadaHartleyoscilatorAinda não há avaliações
- Registro Fotovoltaica Equipamentos 38Documento4 páginasRegistro Fotovoltaica Equipamentos 38에드윈Ainda não há avaliações
- Manual Sony Xplod CDX-GT327X+ (BR)Documento45 páginasManual Sony Xplod CDX-GT327X+ (BR)Renan Lima100% (2)
- Relatorio SenaiDocumento17 páginasRelatorio SenaiCromarcat RanielAinda não há avaliações
- Inversor de String Trifásico 15-30 KW: CSI-15K-T220 - CSI-20K-T220 CSI-25K-T220 - CSI-30K-T220Documento2 páginasInversor de String Trifásico 15-30 KW: CSI-15K-T220 - CSI-20K-T220 CSI-25K-T220 - CSI-30K-T220Luana PereiraAinda não há avaliações
- Inscritos 15maio2015Documento24 páginasInscritos 15maio2015Cauã Vieira da SilvaAinda não há avaliações
- Configuração Do Monitoramento Inversor FRONIUSDocumento22 páginasConfiguração Do Monitoramento Inversor FRONIUSLucas Jantsch83% (6)
- KX NS500 PABX IP Hibrido Manual Do Usuario PNQX6323ZA - CC0314AH0 PDFDocumento398 páginasKX NS500 PABX IP Hibrido Manual Do Usuario PNQX6323ZA - CC0314AH0 PDFAndre RioAinda não há avaliações
- Benefícios ERP e gestão de informaçõesDocumento1 páginaBenefícios ERP e gestão de informaçõesSANDBOYAinda não há avaliações
- Catálogo Completo WebDocumento142 páginasCatálogo Completo WebJackson JackAinda não há avaliações
- Mit - Download 2Documento4 páginasMit - Download 2Victor HugoAinda não há avaliações
- Lista de periódicos e estratos da CAPESDocumento160 páginasLista de periódicos e estratos da CAPESffelintoAinda não há avaliações
- Periodico Minfra MioloDocumento542 páginasPeriodico Minfra MioloalexandreperdigaoAinda não há avaliações
- Exercício Avaliativo - Módulo 1 - Revisão Da TentativaDocumento3 páginasExercício Avaliativo - Módulo 1 - Revisão Da TentativaAna Paula Silva100% (1)
- Um Chatbot para o Centro de Informática (Apresentação)Documento60 páginasUm Chatbot para o Centro de Informática (Apresentação)Vinicius Cardoso GarciaAinda não há avaliações