Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- ArcCurrentRecoveryVoltageUHVtransmissionLine PDFDocumento7 páginasArcCurrentRecoveryVoltageUHVtransmissionLine PDFYeissonSanabriaAinda não há avaliações
- Switchgear 13800VDocumento38 páginasSwitchgear 13800VYeissonSanabriaAinda não há avaliações
- Calculation of 750kV Transmission Line Parameters Based On ATP-EMTP SimulationDocumento4 páginasCalculation of 750kV Transmission Line Parameters Based On ATP-EMTP SimulationYeissonSanabriaAinda não há avaliações
- Paralleling Cts For Line Differential ProtectionDocumento15 páginasParalleling Cts For Line Differential ProtectionYeissonSanabria100% (1)
- Heat Tracing SpecificationDocumento5 páginasHeat Tracing SpecificationYeissonSanabriaAinda não há avaliações
- Yaskawa Pole Switch Technical Chart 2002-01Documento5 páginasYaskawa Pole Switch Technical Chart 2002-01YeissonSanabriaAinda não há avaliações
- Surge Current IGBTDocumento13 páginasSurge Current IGBTYeissonSanabriaAinda não há avaliações
- Three Phase Transformer Model For TransientsDocumento10 páginasThree Phase Transformer Model For TransientsYeissonSanabriaAinda não há avaliações
- IEEE 1100 EjemplosDocumento22 páginasIEEE 1100 EjemplosYeissonSanabriaAinda não há avaliações
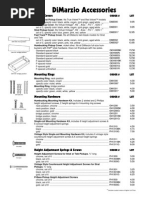
- Di Marzio AccessoriesDocumento3 páginasDi Marzio AccessoriesYeissonSanabriaAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Deterministic Phase Retrieval: A Green's Function SolutionDocumento8 páginasDeterministic Phase Retrieval: A Green's Function Solutionlednakashim100% (1)
- GD&T PDFDocumento109 páginasGD&T PDFBikash Chandra SahooAinda não há avaliações
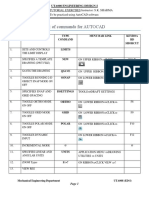
- List of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareDocumento15 páginasList of Commands For Autocad: Cad Lab Tutorial Exercises Instructor: S.K. Sharma To Be Practiced Using Autocad SoftwareShakeelAinda não há avaliações
- SootblowerDocumento9 páginasSootblowerVan LudwigAinda não há avaliações
- HW04 Columbia Modern Algebra 1Documento2 páginasHW04 Columbia Modern Algebra 1Cecilia WangAinda não há avaliações
- Quantum Chemical Descriptors in QSAR QSPR StudiesDocumento17 páginasQuantum Chemical Descriptors in QSAR QSPR StudiesCarlos Alberto Bayona LópezAinda não há avaliações
- AP Calculus AB Practice ExamDocumento21 páginasAP Calculus AB Practice ExamGaming 1 SportsAinda não há avaliações
- Introduction To Fluid Mechanics - TocDocumento3 páginasIntroduction To Fluid Mechanics - TocNguyễn Hồng Quân100% (2)
- T M 34794 Representing Tenths Differentiated Activity Sheet - Ver - 1Documento7 páginasT M 34794 Representing Tenths Differentiated Activity Sheet - Ver - 1Thieu LeAinda não há avaliações
- Eklavya Central Shool, Saharsa: Holiday HomeworkDocumento3 páginasEklavya Central Shool, Saharsa: Holiday HomeworkChitrakumariAinda não há avaliações
- A Meta-Analysis of Research On Sensory Integration TreatmentDocumento10 páginasA Meta-Analysis of Research On Sensory Integration TreatmentPaula CelsieAinda não há avaliações
- Lec 10Documento4 páginasLec 10RKD CinemaAinda não há avaliações
- DATA - Chapter 9Documento33 páginasDATA - Chapter 9Sopan PaswanAinda não há avaliações
- OOPM Theory QuestionsDocumento7 páginasOOPM Theory Questionssheenam_bhatiaAinda não há avaliações
- EnergyPendulum Gizmo 2Documento6 páginasEnergyPendulum Gizmo 2Delia SmithAinda não há avaliações
- Stat Module 5Documento10 páginasStat Module 5Remar Jhon PaineAinda não há avaliações
- Syllabus Jan09 MAT183Documento2 páginasSyllabus Jan09 MAT183Mike ZakwanAinda não há avaliações
- Lab Report 5Documento11 páginasLab Report 5Muhammad SohaibAinda não há avaliações
- Data Science Linear RegressionDocumento105 páginasData Science Linear RegressionJaime Prades KošćinaAinda não há avaliações
- PPT 6 Pms-Remaining Service LifeDocumento22 páginasPPT 6 Pms-Remaining Service LifeSwagata SarkarAinda não há avaliações
- Notes On Absolutely Continuous Functions of Several VariablesDocumento16 páginasNotes On Absolutely Continuous Functions of Several VariablesSufyanAinda não há avaliações
- 8th (0) Physics 9 Weeks DivisionDocumento3 páginas8th (0) Physics 9 Weeks Divisionusama nisarAinda não há avaliações
- DynamicsNAVReference50 16pagesDocumento16 páginasDynamicsNAVReference50 16pagesVincent ZahraAinda não há avaliações
- Influence of Organizational Culture and Compensation On Employee Performance With Motivation Work As A Mediation Variable at Pt. Jasaraharja Branch RiauDocumento8 páginasInfluence of Organizational Culture and Compensation On Employee Performance With Motivation Work As A Mediation Variable at Pt. Jasaraharja Branch RiauInternational Journal of Innovative Science and Research TechnologyAinda não há avaliações
- 1 Quarter: 5 Grade Benchmark Scope and Sequence Pacing Guide 2015-2016Documento3 páginas1 Quarter: 5 Grade Benchmark Scope and Sequence Pacing Guide 2015-2016api-292307509Ainda não há avaliações
- PIDE Presentation Part 1 PDFDocumento7 páginasPIDE Presentation Part 1 PDFGilmar DemenekAinda não há avaliações
- The Impact of Firm Growth On Stock Returns of Nonfinancial Firms Listed On Egyptian Stock ExchangeDocumento17 páginasThe Impact of Firm Growth On Stock Returns of Nonfinancial Firms Listed On Egyptian Stock Exchangealma kalyaAinda não há avaliações
- Aea Cookbook Econometrics Module 1Documento117 páginasAea Cookbook Econometrics Module 1shadayenpAinda não há avaliações