Você também pode gostar
- Delphi catalogue 德尔福目录Documento4 páginasDelphi catalogue 德尔福目录Wang Zheng FengAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Psa Dv6c j3j4 Sid807Documento20 páginasPsa Dv6c j3j4 Sid807Wang Zheng Feng0% (2)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- BOSCH CJ135 Product Information 101201Documento2 páginasBOSCH CJ135 Product Information 101201Wang Zheng Feng100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
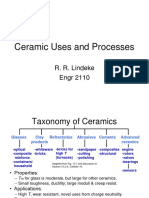
- Ceramic Uses and ProcessesDocumento22 páginasCeramic Uses and ProcessesWang Zheng FengAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- LTC User ManualDocumento39 páginasLTC User ManualWang Zheng FengAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Honda DTCDocumento4 páginasHonda DTCWang Zheng FengAinda não há avaliações
- Far-3320w Im Eng 36240a PDFDocumento169 páginasFar-3320w Im Eng 36240a PDFRabbani mrmstoreAinda não há avaliações
- Specifications: 5 SecondsDocumento2 páginasSpecifications: 5 SecondsMohammed RAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- 18ELE13 23 - Module 1Documento18 páginas18ELE13 23 - Module 1AkhilAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- PSP300 IntertekDocumento6 páginasPSP300 IntertekJames Wayne BarkerAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Electronics Technician ReviewerDocumento10 páginasElectronics Technician ReviewerAlpyn100% (3)
- Experiment #3 Buffer Amplifier: R8 22K U1 LM318 C6 0.1 Uf C5 0.1 Uf C7 0.1 UfDocumento9 páginasExperiment #3 Buffer Amplifier: R8 22K U1 LM318 C6 0.1 Uf C5 0.1 Uf C7 0.1 UfDaniel Cafu100% (1)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Fireye Burnerlogix ZB230 EngDocumento80 páginasFireye Burnerlogix ZB230 Engjohn hutchingsAinda não há avaliações
- Estacion Experiment 4 ReportDocumento12 páginasEstacion Experiment 4 ReportLawrence Neil PimentelAinda não há avaliações
- Ac70 SeriesDocumento147 páginasAc70 SeriesNguyễn Đức SơnAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Dse4420 Installation InstDocumento2 páginasDse4420 Installation InstMuhammad Denny67% (3)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- 5.8 GHZ 2-Line Corded/Cordless Answering System Ep5962: User Manual (Part 2)Documento53 páginas5.8 GHZ 2-Line Corded/Cordless Answering System Ep5962: User Manual (Part 2)Payphone.comAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Psy4 GBDocumento28 páginasPsy4 GBykuscu100% (2)
- SBFM76 enDocumento16 páginasSBFM76 enAhmed Mohamed Abd ElsalamAinda não há avaliações
- Partial Discharge in CablesDocumento77 páginasPartial Discharge in Cableszarchiwin05Ainda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- PCB DesignerDocumento3 páginasPCB DesignerMatthew StoneAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1091)
- Edc PPTDocumento9 páginasEdc PPTParth KelkarAinda não há avaliações
- Self-Powered Feeder Protection REJ603: Product GuideDocumento24 páginasSelf-Powered Feeder Protection REJ603: Product GuideHusejin MehmedovićAinda não há avaliações
- Fisher Fieldvue DVC6200 SIS Digital Valve Controller: Instruction ManualDocumento116 páginasFisher Fieldvue DVC6200 SIS Digital Valve Controller: Instruction Manualanon_179203922Ainda não há avaliações
- VSRSG Ptter Flow SwitchDocumento4 páginasVSRSG Ptter Flow SwitchChristine May CagaraAinda não há avaliações
- User Manual TV Zenith B13a02d PDFDocumento32 páginasUser Manual TV Zenith B13a02d PDFtaz1mxAinda não há avaliações
- DyTerra Troubleshooting RavenDocumento2 páginasDyTerra Troubleshooting Ravendaniel_matias_2Ainda não há avaliações
- Huawei Intersolar PresentationDocumento25 páginasHuawei Intersolar PresentationAxoben BastidasAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- KP-F D XXGV OperationManual EDocumento7 páginasKP-F D XXGV OperationManual EabathunAinda não há avaliações
- Lab 3b PPT - Series MotorDocumento23 páginasLab 3b PPT - Series MotorLiaqat AliAinda não há avaliações
- Equivalent SPICE Circuits With Guaranteed Passivity From Nonpassive ModelsDocumento8 páginasEquivalent SPICE Circuits With Guaranteed Passivity From Nonpassive ModelsAnonymous rsGzBBiqkAinda não há avaliações
- Se3.3ni-4.6ni en NewDocumento1 páginaSe3.3ni-4.6ni en NewJovan MilenkovicAinda não há avaliações
- Posco CrgoDocumento35 páginasPosco CrgoRichard SyAinda não há avaliações
- Mikro MX200A, 180A, 160A Voltage RelayDocumento2 páginasMikro MX200A, 180A, 160A Voltage RelayAbdurohmän AufklärunkAinda não há avaliações
- CH 11 Section 1 Reading EssentialsDocumento5 páginasCH 11 Section 1 Reading EssentialsCAMERON MIZEAinda não há avaliações
- Fdocuments - in - Ca650059en 600 A 25 KV Class T Op II Deadbreak Apparatus With Its Cooper PowerDocumento8 páginasFdocuments - in - Ca650059en 600 A 25 KV Class T Op II Deadbreak Apparatus With Its Cooper PowerJalal AlbadriAinda não há avaliações