Você também pode gostar
- Image Processing Captured Image: Figure 2-1 How The TSR System WorksDocumento11 páginasImage Processing Captured Image: Figure 2-1 How The TSR System WorksSabah Robitan MahmoodAinda não há avaliações
- Traffic Signs and Recognition PresentationDocumento20 páginasTraffic Signs and Recognition PresentationSabah Robitan MahmoodAinda não há avaliações
- Start PDFDocumento11 páginasStart PDFSabah Robitan MahmoodAinda não há avaliações
- Cover Main PDFDocumento1 páginaCover Main PDFSabah Robitan MahmoodAinda não há avaliações
- Practical Work and Results: Figure 3-1 GUI Form Before RunningDocumento12 páginasPractical Work and Results: Figure 3-1 GUI Form Before RunningSabah Robitan MahmoodAinda não há avaliações
- Chapter - 1 Introduction: Figure 1-1 TSR System ArchitectureDocumento5 páginasChapter - 1 Introduction: Figure 1-1 TSR System ArchitectureSabah Robitan MahmoodAinda não há avaliações
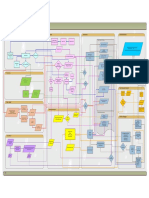
- Methodology PDFDocumento1 páginaMethodology PDFSabah Robitan MahmoodAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- Getting Started With The: USB Oscilloscope, Function Generator, Logic Analyzer and Spectrum AnalyzerDocumento6 páginasGetting Started With The: USB Oscilloscope, Function Generator, Logic Analyzer and Spectrum AnalyzerStephen MalinakAinda não há avaliações
- Written Test PaperDocumento12 páginasWritten Test PaperSrividhya RamakrishnanAinda não há avaliações
- ACFrOgBAzNOIx5N9qNMtbcSMYOSH3FKyaB5ixNwZOdUDFMsozRAhhylOAlf0qxj1wTV6WKCTIZolEAc6EKVeCOauKSM0ngj3kINhgbVB8XtprKzxudRLvno MprCoj0 PDFDocumento43 páginasACFrOgBAzNOIx5N9qNMtbcSMYOSH3FKyaB5ixNwZOdUDFMsozRAhhylOAlf0qxj1wTV6WKCTIZolEAc6EKVeCOauKSM0ngj3kINhgbVB8XtprKzxudRLvno MprCoj0 PDFSaqib JawedAinda não há avaliações
- Modal Time History AnalysisDocumento14 páginasModal Time History AnalysisGraham Roberts100% (1)
- Enet qr001 - en e PDFDocumento5 páginasEnet qr001 - en e PDFDicky EkaAinda não há avaliações
- Dynamic ProgrammingDocumento52 páginasDynamic ProgrammingattaullahchAinda não há avaliações
- Sqlloader For OracleDocumento10 páginasSqlloader For OraclehariprasathdbaAinda não há avaliações
- Integers Division - 0909 - 0909 0 001.1360985445Documento2 páginasIntegers Division - 0909 - 0909 0 001.1360985445Anonymous jHgxmwZAinda não há avaliações
- CS 4290/6290: High-Performance Computer Architecture Spring 2004 Midterm QuizDocumento3 páginasCS 4290/6290: High-Performance Computer Architecture Spring 2004 Midterm QuizislslslsAinda não há avaliações
- HP Build IdDocumento6 páginasHP Build IdgermanAinda não há avaliações
- IntelDocumento5 páginasIntelrAM67% (3)
- ValScope PRO 0909 WebDocumento2 páginasValScope PRO 0909 Webrujisak_m0% (1)
- Exploration Flowchart DataDocumento1 páginaExploration Flowchart Datasesbasar sitohangAinda não há avaliações
- Web Image Re-Ranking Using Query-Specific Semantic SignaturesDocumento14 páginasWeb Image Re-Ranking Using Query-Specific Semantic Signaturesphilo minaAinda não há avaliações
- DCS Objective QuestionDocumento20 páginasDCS Objective QuestionravigwlAinda não há avaliações
- 12 OAA Command Reference-BookDocumento25 páginas12 OAA Command Reference-BooknboninaAinda não há avaliações
- The Role of Marketing Research and Research ProcessDocumento37 páginasThe Role of Marketing Research and Research ProcessAlifa ApriliaAinda não há avaliações
- Codeforces TutorialDocumento72 páginasCodeforces TutorialNeeraj SharmaAinda não há avaliações
- Como Transferir Objetos de PD-PY-DVDocumento4 páginasComo Transferir Objetos de PD-PY-DVElias GomezAinda não há avaliações
- Minty Variational Inequality and Optimization: Scalar and Vector CaseDocumento19 páginasMinty Variational Inequality and Optimization: Scalar and Vector Casersb172Ainda não há avaliações
- Bloodborne The Old Hunters Collectors Edition Guide 6alw0hoDocumento2 páginasBloodborne The Old Hunters Collectors Edition Guide 6alw0hoKaranPadhaAinda não há avaliações
- BSC Command ParametersDocumento7 páginasBSC Command ParametersKusuma WardanaAinda não há avaliações
- Siemens NX - GuidanceDocumento8 páginasSiemens NX - Guidancedjtj89100% (1)
- 2006 Study With Costs of Transmission and OtherDocumento171 páginas2006 Study With Costs of Transmission and OtherdougmcculloughAinda não há avaliações
- Data Structures & Algorithm in Java - Robert Lafore - PPTDocumento682 páginasData Structures & Algorithm in Java - Robert Lafore - PPTmonsterspyAinda não há avaliações
- RHEL6 DatasheetDocumento8 páginasRHEL6 DatasheetArmando Paredes JaraAinda não há avaliações
- Bba 3rd Sem ResultDocumento1 páginaBba 3rd Sem ResultMalaika SinghalAinda não há avaliações
- R12 Uploading A Journal Using Web ADI - Step by Step - Oracle Techno & FunctionalDocumento18 páginasR12 Uploading A Journal Using Web ADI - Step by Step - Oracle Techno & FunctionalMadhavi SinghAinda não há avaliações
- 4 Ways To Solve A Rubik's Cube (Easy Move Notation) - WikiHowDocumento14 páginas4 Ways To Solve A Rubik's Cube (Easy Move Notation) - WikiHowBaguma Grace GariyoAinda não há avaliações
- Handbook of Spectrum Monitoring 2011Documento678 páginasHandbook of Spectrum Monitoring 2011haripost100% (1)