Escolar Documentos
Profissional Documentos
Cultura Documentos
Sistema de Gruas para Personas Discapacitadas
Enviado por
mayraTítulo original
Direitos autorais
Formatos disponíveis
Compartilhar este documento
Compartilhar ou incorporar documento
Você considera este documento útil?
Este conteúdo é inapropriado?
Denunciar este documentoDireitos autorais:
Formatos disponíveis
Sistema de Gruas para Personas Discapacitadas
Enviado por
mayraDireitos autorais:
Formatos disponíveis
ESCUELA SUPERIOR DE INGENIERA
MECNICA Y ELCTRICA
UNIDAD PROFESIONAL AZCAPOTZALCO
SISTEMA DE GRAS PARA
PERSONAS DISCAPACITADAS PARA
EL CENTRO DE REHABILITACIN
INFANTIL TELETN; DERIVADO DEL
PROYECTO DE INVESTIGACIN
CGPI No. 20031103
TESIS PROFESIONAL
PARA OBTENER EL TITULO DE
INGENIERO EN ROBOTICA INDUSTRIAL
PRESENTAN:
CAMARGO AGUILAR DANIEL
CRUZ FLORES RICARDO
GONZALEZ VILLA JULIO CESAR
MAQUEDA RODRIGUEZ LUIS
MEXICO, D.F. A DE OCTUBRE 2005
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INDICE
CAPITULO I 8
INTRODUCCIN 9
CONDICIONES DE EQUILIBRIO 10
CLASES Y GENEROS DE LAS MAQUINAS 10
MAQUINAS SIMPLES 11
LA PALANCA 11
LA POLEA 14
EL TORNO 16
EL PLANO INCLINADO 17
EL TORNILLO 19
LA CUA 20
MAQUINAS COMPUESTAS 20
LA RUEDA DENTADA 20
EL POLIPASTO 23
TELETON MEXICO 24
ALGUNAS DEFINICIONES 25
PROBLEMAS EMOCIONALES SERIOS 27
PROBLEMA ESPECIFICO DEL APRENDIZAJE 27
IMPEDIMENTOS DEL HABLA O LENGUAJE 28
LESIN CEREBRAL TRAUMATICA 28
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 2 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
TELETON UN APORTE A LA DISCAPACIDAD 28
TIPOS DE DISCAPACIDAD 30
LA DISCAPACIDAD EN CIFRAS 32
PRINCIPALES CAUSAS DE LA DISCAPACIDAD 35
COMO AYUDAR AL DISCAPACITADO 35
CAPTULO II 42
GRUAS INDUSTRIALES 43
GRAS VIAJERAS 44
GRAS TIPO TORRE 47
GRAS BANDERA ARTICULADAS 50
GRAS PARA DISCAPACITADOS 52
APTITUDES ERGONMICAS 52
TIPOS Y CARACTERSTICAS DE LA GRA 53
ESPECIFICACIONES DE LAS GRAS MOVILES 55
SOPORTES CORPORALES PARA DISCAPACITADOS 57
REQUERIMIETO DE LAS GRAS SOLICITADAS POR EL 60
CENTRO DE REHABILITACION TELETON
GRA FIJA 60
GRA MVIL 62
ASPECTOS DE SEGURIDAD 66
MEDIDAS DE SUGURIDAD 70
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 3 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
COMPORTAMIENTO HUMANO 70
NORMAS DE SEGURIDAD 70
OBLIGACIONES DEL OPERADOR 70
SISTEMAS DE SEGURIDAD 71
SISTEMA ELCTRICO 71
ELEMENTOS MECNICOS 71
CAPTULO III 72
INTRODUCCIN 73
CALCULOS DE LA GRUA FIJA 74
COLUMNA 74
BRAZO 79
TORNILLOS 82
CALCULOS DE LA GRUA MOVIL 83
SOPORTE ELEM-1 84
SOPORTE ELEM-2 85
COLUMNA ELEM-3 89
BASE ELEM-4 93
BASE ELEM-5 Y ELEM-6 102
SELECCIN DE ACCESORIOS 105
MOTOREDUCTOR 105
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 4 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
POLEAS, TAMBOR Y CABLE 107
COPLE 107
DIBUJOS DE LA GRA MVIL 108
DIAGRAMA ELECTRICO 124
MODIFICACIONES DE LA GRA MOVIL 125
CAPITULO IV 127
PRIMERA PARTE
GRUA FIJA 128
SEGUNDA PARTE
GRUA MOVIL 130
COSTOS DE FABRICACION 132
TERCERA PARTE
LISTA DE PRECIOS DE ALGUNAS GRUAS EXISTENTES 134
CONCLUSIONES 135
BIBLIOGRAFA 137
ANEXO 1 (NORMA CMAA) 138
ANEXO 2 (TABLAS Y CATALOGOS) 161
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 5 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INTRODUCCIN.
"La discapacidad, su aceptacin e integracin, dependen en gran parte
de la sociedad. Pero no slo de los adelantos cientficos y mdicos que los
puedan ayudar a desarrollarse mejor, sino principalmente del amor. Y
debemos el mrito a Dios, quien es amor y ensea a amar."
El trabajo se decidi realizar en conjunto de una institucin mexicana, el Centro de
Rehabilitacin Integral Teletn, ubicado en la va Gustavo Baz en Tlanepantla, ya
que ellos estn en contacto permanente con ste tipo de personas y nos pueden
orientar de que tipo y que forma son las que necesitan para darles a sus pacientes un
mejor trato para su rehabilitacin, adaptacin e reintegracin a la sociedad.
Nuestro objetivo primordial, es el facilitar al personal que trabaja en el Teletn la
tarea de trasladar a sus pacientes para poder realizar sus actividades, terapias y
dems actividades para lograr as un desarrollo integral.
El centro cuenta con diversas reas, dentro de las cuales se puede nombrar a un
rea de especialistas, que se encargan de evaluar a los pacientes y su grado de
discapacidad, es aqu donde se deciden los tratamientos y terapias a seguir; el
rea de rehabilitacin, integracin y aprendizaje, donde podemos ubicar a la
casita que es una representacin de una casa, en donde se ensea a los
pacientes su funcin dentro de sta, adems que se les ensea para que sirve
cada instrumento o aparato electrodomstico, los diferentes tipos de cerrojos,
dentro de ste mismo espacio se cuenta con un rea de lenguaje, que es donde se
ensea a los alumnos a pronunciar correctamente as como hablar. En otro
espacio se cuenta con un rea la cual tiene diversos objetos, cuyo propsito es le
de ensearles a los pacientes como hacerlos y su correcto funcionamiento aqu
entra lo que es el correcto uso de cubiertos, utensilios de escritura. Otra de las
reas muy importante es una en donde se les ensea a los pacientes a ser un
poco ms independientes y a integrarlos en una comunidad. Para esto se utilizan
dos reas, una que es de actividades manuales en donde se les ensea a cocer,
realizar distintas labores manuales as como a preparar diversos platillos
alimenticios sencillos de manera adecuada, para integracin en un ambiente de
trabajo con diversas personas se cuenta con el taller musical, parte que se les
ensea a los pacientes a trabajar en equipo y a tiempos especficos se les ensea
a tocar un instrumento.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 6 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Todo este tipo de terapias son las que hacen que el paciente tenga una
rehabilitacin integral y sobre todo de calidad.
La finalidad de nuestro proyecto es disear dos gras (una mvil y otra fija),
empleando elementos mecnicos y elctricos, as como demostrar las grandes
aplicaciones que se le pueden dar a la ingeniera en robtica industrial enfocado
al rea de rehabilitacin.
De esta manera queremos agradecer a la sociedad la gran oportunidad que
tuvimos de terminar una carrera profesional. Queremos ayudar a esa gran
institucin como es el TELETN y poner en alto el nombre de E.S.I.M.E. y de todo
el Instituto Politcnico Nacional.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 7 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
CAPTULO
1
EN ESTE CAPTULO SE ESPECIFICAN LAS CARACTERSTICAS Y
USOS DE LAS PRIMERAS MQUINAS SIMPLES Y COMPUESTAS,
QUE DAN ORIGEN A LAS MQUINAS QUE CONOCEMOS HOY EN
DA.
UNA DE STAS ES LA GRA, LA CUAL FORMA PARTE DE LA
COLUMNA CENTRAL DE STA TESIS.
ADEMS, SE HABLARA DE LAS FUNCIONES QUE REALIZA EL
TELETON EN BENEFICIO DE LAS PERSONAS DISCAPACITADAS.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 8 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Introduccin.
La ingeniera es un conjunto de tcnicas que permiten aplicar el saber cientfico
a la utilizacin de la materia y las fuentes de energa, mediante invenciones o
construcciones tiles para el hombre.
En la ingeniera contamos con diversos elementos, los cuales nos ayudan a
realizar nuestras labores ms fcilmente.
El ingeniero debe ser capaz de identificar y comprender las limitaciones
(disponibilidad de recursos materiales, humanos, tcnicos y econmicos), as
como los requisitos (utilidad, coste, seguridad y esttica) aplicables al objeto o
sistema que pretende disear y construir.
En muchos casos es necesario manipular, transportar y/o colocar objetos
grandes y pesados, por lo qu el hombre desde tiempos remotos ha pensado la
forma ms fcil de hacer stos trabajos difciles, de esta manera surgen las
primeras mquinas. Pero el hombre no conforme con esto empez a hacer
construcciones ms grandes y altas, con lo cual, necesit llevar a alturas ms
grandes todos sus implementos de trabajo y su persona. De aqu resultan las
primeras gras o los primeros mecanismos de elevacin de materiales y
personas, que son conocidos como mquinas compuestas.
Las mquinas son dispositivos utilizados para cambiar la magnitud y aplicacin
de una fuerza. Estn constituidas por aparatos combinados para recibir cierta
forma de energa, transformarla y sustituirla por otra ms adecuada, o para
producir un efecto determinado. Se dividen en simples, como la palanca, la
polea, el torno, el plano inclinado; y compuestas, como los engranajes, las gras
y los polipastos.
La utilidad de una mquina radica en que permite ejercer una fuerza mayor que
la que una persona podra aplicar slo con sus msculos o tambin aplicarla de
un modo ms eficaz. Pero las mquinas no aprovechan todo el trabajo que
reciben, sino que parte de l se pierde en rozamientos, elevaciones de
temperatura, etc. Para conocer el rendimiento de una maquina se tiene la
siguiente ecuacin:
Rendimiento = (Trabajo til / Trabajo total)*100
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 9 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Condicin de equilibrio.
Si la resultante de todas las fuerzas que actan sobre una partcula es cero, la
partcula se encuentra en equilibrio. Una partcula sujeta a la accin de dos
fuerzas estar en equilibrio si ambas tienen la misma magnitud, la misma lnea
de accin y sentidos opuestos. Entonces la resultante de las dos fuerzas es cero
Fig. 1.1.
Para expresar algebraicamente las condiciones del equilibrio de una partcula,
escribimos
R = F = 0
Descomponiendo cada fuerza F en sus componentes rectangulares, tenemos
(F i + F j ) = 0
x y
Se concluye que las condiciones necesarias para el equilibrio de una partcula
son:
F x =0 F y =0
FIGURA 1.1 CONDICIN DE EQUILIBRIO
Clases y gneros de las mquinas.
La diversidad de formas en que puede manifestarse la energa, los innumerables
mecanismos que es posible realizar mediante la combinacin de los rganos
simples y la heterogeneidad de los trabajos que tienen que ejecutarse, hacen
que existan una extensa y rica gama de mquinas.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 10 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Puede considerarse en primer lugar las mquinas que son simples
transformadoras de energa y cambiar la forma bajo la que est dicha energa.
Destacan las mquinas motrices o motores que transforman una determinada
energa en energa mecnica.
Otro tipo de categora diferente de mquinas est constituida por aquellas que
su funcin consiste en utilizar la energa que le es suministrada para obtener
un resultado inmediato. Estas mquinas se llaman compuestas, y destacan las
mquinas- herramientas, mquinas agrcolas y las mquinas de elevacin o
transporte.
Mquinas Simples.
Las mquinas simples son las ms antiguas y el principio de todas las
mquinas que conocemos hoy en da. Estn formadas por: la palanca, la polea,
el torno, el plano inclinado, el tornillo y la cua.
La Palanca.
La palanca es una barra inflexible y recta con un punto de apoyo denominado
fulcro y dos puntos de aplicacin de sendas fuerzas llamadas potencia y
resistencia. Los tres puntos se hallan en un plano y se llama brazo de potencia
al segmento perpendicular trazado desde el punto de apoyo hasta la lnea de
accin de la potencia; y brazo de resistencia al segmento perpendicular trazado
desde el punto de apoyo hasta la lnea de accin de la resistencia.
El efecto de cualquier fuerza aplicada a la palanca hace girar a sta con
respecto al fulcro, por lo que podemos decir que la fuerza rotatoria es
directamente proporcional a la distancia entre el fulcro y la fuerza aplicada.
La potencia de la palanca solamente se puede aumentar o disminuir a base de
alargar o acortar el camino de sta, manteniendo constante el producto.
Adems, como todas las mquinas simples, slo sirve para transformar las
condiciones de trabajo.
En esta situacin particular, el principio de la palanca se puede expresar como
una sencilla ecuacin:
FpBp = FrBr
Donde Fp y Fr son las fuerzas de potencia y resistencia, respectivamente; y Bp y
Br sus respectivos brazos de palanca.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 11 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
F R
a b
FIGURA 1.2 LA PLANCA COMO MQUINA SIMPLE.
Adems, la palanca se divide en tres gneros, que se diferencian en la
colocacin de la potencia, la resistencia y el punto de apoyo. stas son:
nter Mviles o de Primer Gnero: Tienen el punto de apoyo cerca de la
resistencia, quedando con un brazo de palanca muy corto como en las tijeras o
pinzas de mecnico o similares. En este tipo, el punto de apoyo se encuentra
entre la resistencia y la potencia.
FIGURA 1.3 IMAGEN DE PALANCA INTERMVIL
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 12 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
nter Resistentes o de Segundo Gnero: Tienen el punto de apoyo en un extremo
de la palanca, la potencia en otro extremo y la resistencia en algn punto
intermedio, como en las carretillas o en los diablos.
FIGURA 1.4 IMAGEN DE PALANCAS INTER RESISTENTES
nter Potentes o de Tercer Gnero: Aplican la potencia en cualquier punto entre
la resistencia y el punto de apoyo como sucede con las pinzas para tomar el pan
o las ensaladas, o en las de depilar.
FIGURA 1.5 PALANCAS INTERPOTENTES
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 13 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
La Polea.
La polea es un dispositivo mecnico de traccin o elevacin formada por una
rueda o rondana acanalada en su circunferencia y mvil alrededor de un eje.
Por el canal o garganta pasa una cuerda, correa, o cadena, en cuyos dos
extremos actan, respectivamente, la potencia y la resistencia.
Al estirar desde un extremo de la cuerda, la polea se encarga solamente de
invertir el sentido de la fuerza aplicada, por lo tanto no existe ventaja mecnica,
es decir, ninguna ganancia en la transmisin de la fuerza ya que slo puede
haber prdidas debidas al rozamiento. Se emplea para levantar cargas a cierta
altura, como en los pozos para llenar el cubo de agua.
El desplazamiento que causa la fuerza sobre la cuerda igual a la altura subida
por la carga. De manera que:
L=H
A=1
Donde:
A: ventaja mecnica
L: desplazamiento causado por la fuerza aplicada
H: altura subida por la carga
Por lo que respecta a la fuerza aplicada, sabemos que:
F aplicada = m g
m: masa de la carga
g: aceleracin de la gravedad
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 14 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
FIGURA 1.6 FIGURA ESQUEMTICA DE UNA POLEA
Existen dos tipos de poleas: Poleas fijas y Poleas mviles. En las poleas fijas el
eje se encuentra fijo, por lo tanto, la polea no se desplaza.
Con su uso no se obtiene ventaja mecnica, ya que en uno de los extremos
estar sujeta la carga y en el otro se aplicar la fuerza para moverla, sta ser
de la misma magnitud.
La polea fija solamente se utiliza para cambiar la direccin o sentido de la
fuerza. Su frmula es F = C, siendo (C) la carga.
En las poleas mviles el punto de apoyo est en la cuerda y no en el eje, por lo
tanto puede presentar movimientos de traslacin y rotacin. Como el caso de
dos personas que cargan una bolsa, cada una de ellas hace las veces de una
polea y sus brazos las veces de cuerdas, el peso se reparte entre los dos y se
produce una ventaja mecnica, que se expresa como:
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 15 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
C
F= ,
2
Siendo:
F = fuerza,
C = carga;
el esfuerzo se reduce a la mitad.
FIGURA 1.7 DIBUJO ESQUEMTICO DE UNA POLEA
El Torno.
El torno o cabestrante es una mquina simple que consiste en un cilindro
concntrico dispuesto para girar alrededor de su eje por la accin de palancas,
cigeas o ruedas, y que ordinariamente acta sobre la resistencia por medio
de una cuerda que se va enrollando al cilindro.
El torno combina los efectos de la polea y de la palanca al permitir que la fuerza
aplicada sobre la cuerda cambie de direccin y aumente o disminuya,
aplicndose la potencia tangencialmente al cilindro por medio de un manubrio.
El torno es usado en multitud de cosas entre las que destaca el tren de
engranajes rectos de la maquinaria de un reloj.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 16 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
FIGURA 1.8 DIBUJO ESQUEMTICO DE UN TORNO.
El Plano Inclinado.
Est formado por la longitud del plano (I), la altura (h), el peso del cuerpo o
carga (p) y la fuerza necesaria para subir la carga (F)
El plano inclinado es una superficie plana resistente que forma un ngulo
agudo con el horizonte y por medio del cual se facilita la elevacin o el descenso
de pesos y otras cosas. La rampa facilita la tarea, pues soporta gran parte del
peso del objeto, de forma que con poca fuerza lo podemos desplazar hasta lo
ms alto. Sin embargo, el esfuerzo final es el mismo que si lo subimos
directamente.
sta mquina simple descompone la fuerza del peso en dos componentes: la
normal (que soporta el plano inclinado) y la paralela al plano (que compensa la
fuerza aplicada). De esta manera, el esfuerzo necesario para levantar la carga es
menor y, dependiendo de la inclinacin de la rampa la ventaja es muy
considerable. La fuerza aplicada debe ser:
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 17 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
F aplicada = m g sen()
m: masa de la carga
g: aceleracin de la gravedad
: ngulo que forma el plano inclinado con el suelo
La altura subida por la carga es: H = L sen()
H: altura subida por la carga
L: desplazamiento causado por la fuerza aplicada
De manera que la ventaja mecnica resulta ser simplemente:
A = 1 / sen() = L / H
l = longitud
h = altura
P = peso
F = fuerza
l h
P
ANGULO
FIGURA 1.9 DIBUJO DEL PLANO INCLINADO
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 18 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
El Tornillo.
El tornillo es un cilindro o tronco de cono muy aguzado, generalmente de ms
longitud que dimetro, hecho de metal (hierro acero o latn), madera, plstico,
etc.; con cabeza plana o semiesfrica, dotada de una ranura, resalto en hlice
en su contorno y extremo agudo. Se utiliza para asegurar dos piezas entre s,
metindolo y dndole vueltas con el destornillador, asegurado en la ranura de la
cabeza.
El tornillo es una aplicacin del plano inclinado, que en este caso est
enrollado, al introducirse en algn material el rozamiento es demasiado grande,
evitando de esta manera que sea expulsado por la fuerza de resistencia.
El empleo del tornillo como mecanismo simple (en ese caso tambin se
denomina husillo o tornillo sin fin) aprovecha la ganancia mecnica del plano
inclinado. Esta ganancia aumenta por la palanca que se suele ejercer al girar el
cilindro, pero disminuye debido a las elevadas prdidas por rozamiento de los
sistemas de tornillo.
Sin embargo, las fuerzas de rozamiento hacen que los tornillos sean
dispositivos de fijacin eficaces.
Este movimiento controlado tambin se emplea en diversas mquinas
herramientas, por ejemplo en los tornos, donde permite desplazar con gran
precisin la herramienta de corte. El principio del tornillo sin fin tambin se
aplica en cintas transportadoras y en ciertos tipos de bombas.
FIGURA 1.10 FIGURA ESQUEMATICA DE UN TORNILLO
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 19 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
La Cua.
La cua es una mquina simple de madera o de metal terminada en ngulo
diedro muy agudo. Sirve para hender o dividir cuerpos slidos, para ajustar o
apretar uno con otro, para calzarlos o para llenar alguna raja o hueco. Acta
como un plano inclinado mvil. El filo de un hacha es, en realidad, una cua
afilada. Tal como hara una rampa, permite desplazar un peso con mayor
facilidad.
FIGURA 1.11 FIGURA ESQUEMATICA DE LA CUA
Mquinas Compuestas.
Las mquinas compuestas estn formadas por varias mquinas simples. Son la
rueda dentada, el polipasto y la gra.
La Rueda Dentada.
La rueda dentada o engranaje es un cilindro empleado para transmitir un
movimiento giratorio o alternativo desde una parte de una mquina a otra. Un
conjunto de dos o ms engranajes que transmite el movimiento de un eje a otro
se denomina tren de engranajes.
Los engranajes se utilizan sobre todo para transmitir un movimiento giratorio
en movimiento alternativo y viceversa. Existen dos tipos de engranajes: rectos y
helicoidales.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 20 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
En un engranaje sencillo, el eje impulsado gira en sentido opuesto al eje
impulsor. Si se desea que ambos ejes giren en el mismo sentido se introduce
una rueda dentada entre el engranaje impulsor o motor y el impulsado. La
rueda gira en sentido opuesto al eje impulsor, por lo que mueve al engranaje
impulsado en el mismo sentido que ste.
En un sistema de engranajes, la velocidad del eje impulsado depende del
nmero de dientes de cada engranaje. Empleando un tren de varios engranajes
puede variarse la relacin de velocidades dentro de unos lmites muy amplios.
En los engranajes interiores los dientes estn tallados en la parte interior de un
anillo en vez de en el exterior. Los engranajes interiores suelen ser impulsados
por un pin, un engranaje pequeo con pocos dientes.
FIGURA 1. 12 TIPOS DE RUEDAS DENTADAS
En los engranajes helicoidales los dientes de estos engranajes no son paralelos
al eje, sino que se enroscan en torno al eje en forma de hlice. Estos engranajes
son apropiados para grandes cargas ya que los dientes giran formando un
ngulo agudo. Los engranajes helicoidales sencillos tienen la desventaja de
producir una fuerza de empuje que tiende a mover las ruedas dentadas a lo
largo de sus ejes.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 21 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Esta fuerza puede evitarse empleando engranajes helicoidales dobles, o
bihelicoidales, con dientes en forma de V compuestos de medio diente helicoidal
dextrgiro y medio diente helicoidal levgiro.
Otra variacin del engranaje helicoidal es el engranaje de husillo, tambin
llamado tornillo sin fin. La diferencia entre un engranaje de husillo y un
engranaje helicoidal es que los dientes del primero se deslizan a lo largo de los
dientes del engranaje impulsado en lugar de ejercer una presin de rodadura
directa. Los engranajes de husillo se utilizan para transmitir rotacin entre dos
ejes perpendiculares.
FIGURA 1.13 IMAGEN DE ENGRANES HELICOIDALES
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 22 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
El Polipasto.
El polipasto es una mquina simple que se usa para levantar cargas muy
pesadas a una cierta altura. Est formado por un bloque de poleas fijo al techo,
y otro bloque de poleas mvil, acoplado al primer bloque mediante una cuerda.
Se usa de forma similar a la polea simple, pero en el caso del polipasto la fuerza
que hay que aplicar es menor, de manera que se consigue una ventaja
mecnica.
La fuerza necesaria para subir una carga se obtiene dividiendo el peso por el
nmero total de poleas en el conjunto. El inconveniente que presenta es que
hay que estirar ms cuerda que en el caso de la polea simple.
En el caso ms sencillo de la figura 1.14, en que cada bloque est formado por
slo una polea, el desplazamiento que causa la fuerza sobre la cuerda es el
doble de la altura subida por la carga, y la fuerza aplicada es slo la mitad del
peso. De manera que:
FIGURA 1.14 SISTEMA DE POLEAS COMPUESTAS
mg
Faplicada = L = 2H
2
A=2 L: Desplazamiento causado
por la fuerza aplicada
F aplicada: Fuerza aplicada H: Altura subida por la carga
m: Masa de la carga
g: Aceleracin de la gravedad
A: Ventaja mecnica
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 23 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Teletn Mxico:
En 1997, Mxico toma la iniciativa de llevar a cabo su propio
Teletn, para lo cual se tuvo un acercamiento con diferentes
medios de comunicacin, patrocinadores, artistas, comunicadores,
entre otros, para lograr un evento de unidad nacional.
Ya son 5 los Teletones, se han construido 3 centros de
FIGURA 1.15
Rehabilitacin Infantil Teletn, uno en Tlalnepantla, Estado de
LOGOTIPO DE LA Mxico, otro en Guadalajara,
INSTITUCIN.
Jalisco y el tercero ubicado en
San Raymundo Jalpan, Oaxaca.
El cuarto Centro de Rehabilitacin Infantil Teletn
se construir en Aguascalientes.
Asimismo, 234 instituciones que trabajan en el
sector de la discapacidad en toda la Repblica,
La palabra Teletn significa: "Unin + Televisin".
Es el conjunto de todos los medios de
comunicacin, para realizar una campaa
motivacional, con el objetivo de reunir fondos para FIGURA 1.16 CULTURA DE
los nios discapacitados. REHABILITACIN.
Esta sigla TELETHON es originaria de Norteamrica y es producto del equipo
creativo de Jerry Lewis. La expresin engloba los conceptos de solidaridad,
alegra, discapacidad, integracin y unin de un pueblo.
Bajo el alero de este trmino, hay cuatro instituciones que estn ligadas entre
s, pero que no son suficientemente conocidas y distinguidas por parte de la
opinin pblica.
La Sociedad Pro Ayuda del Nio Lisiado (SPANL): Su fin es proporcionar
ayuda a los nios discapacitados, con secuela de Poliomielitis.
La Fundacin Teletn: Es producto de la gestin del animador de
televisin Mario Kreutzberger, quien import de Estados Unidos un
concepto de campaa.
Los Institutos de Rehabilitacin Infantil (IRI), hoy Institutos Teletn:
Fueron creados con el objeto de tener un lugar fsico donde otorgar
asistencia mdica a los nios.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 24 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Teatro Teletn, ex Casino las Vegas: Fue adquirido con el tiempo para la
realizacin de las campaas de amor.
Adems hay una quinta institucin denominada ORITEL, que es la
Organizacin de Teletones en Amrica, pero conceptualmente no se ve
involucrada en esta polisemia del trmino Teletn.
Algunas Definiciones.
Deficiencia: Es toda prdida o anormalidad de una estructura o funcin
sicolgica, fisiolgica o anatmica.
Discapacidad: Es toda restriccin o ausencia (debido a una deficiencia) de la
capacidad de realizar una actividad en la forma o dentro del margen que se
considera normal para un ser humano.
Minusvala: Es una situacin desventajosa para un individuo determinado,
consecuencia de una deficiencia o de una discapacidad, que limita o impide el
desempeo de un papel que es normal en su caso (en funcin de su edad, sexo
y factores sociales y culturales).
FIGURA 1.17 DISTINTOS TIPOS DE DISCAPACIDAD
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 25 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Discapacidades:
Existen cinco principales tipos de discapacidad, clasificadas segn los mbitos
del ser humano que afectan:
Discapacidad mental
Discapacidad fsica
Discapacidad squica
Discapacidad auditiva
Discapacidad visual
Autismo: discapacidad del desarrollo, la cual afecta la comunicacin
verbal y no-verbal y la interaccin social. Generalmente es evidente antes
de los tres aos de edad.
Impedimentos Auditivos: ya sea permanente o fluctuante, no se incluye
bajo la definicin de "sordera.
Sordera: impedimento auditivo que impide el procesamiento de
informacin lingstica
Sordo-Ciego: Impedimentos auditivos y visuales simultneos, causa
problemas de comunicacin
Retraso Mental: Un funcionamiento intelectual general bajo promedio, el
cual coexiste con dficit en la conducta adaptable, manifestndose
durante el perodo del desarrollo
Discapacidades Mltiples: Impedimentos simultneos (tales como el
retraso mental/ceguera, retraso mental/impedimentos ortopdicos, entre
otros.)
Impedimentos Ortopdicos; El trmino incluye impedimentos causados
por alguna anomala congnita (por ejemplo, los pies zopo, falta de algn
miembro del cuerpo, etc.), e impedimentos causados por enfermedad (por
ejemplo, la poliomielitis, tuberculosis), e impedimentos que resultan de
otras causas (por ejemplo, parlisis cerebral, amputaciones, y fracturas o
quemaduras que causan contracturas).
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 26 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Otros Impedimentos de la Salud: Una condicin que se caracteriza por
falta de energa, vitalidad, o actividad, por causa de problemas de la
salud, crnicos o agudos, tales como una condicin cardiaca,
tuberculosis, fiebre reumtica, nefritis, asma, anemia facl iforme,
hemofilia, epilepsia, envenenamiento con plomo, leucemia, o diabetes.
Problemas Emocionales Serios:
(I) Una condicin que exhibe una o ms de las siguientes caractersticas, bien
marcadas y a travs de un largo perodo de tiempo, las cuales afectan
adversamente el desempeo escolar:
(A) la inhabilidad de aprender, la cual no puede explicarse mediante
factores intelectuales, sensoriales, ni de la salud.
(B) la inhabilidad de formar y mantener relaciones interpersonales con los
compaeros de escuela ni con los profesores
(C) un comportamiento o sentimientos inapropiados, bajo circunstancias
normales
(D) un mal humor general, o una depresin
(E) una tendencia a desarrollar sntomas fsicos o temores asociados con
los problemas personales o escolares.
(II.) El trmino incluye a los nios con esquizofrenia. El trmino no incluye a los
nios que son mal ajustados socialmente, a no ser que se determine que estos
tengan algn problema emocional serio.
Problema especfico del aprendizaje:
La presencia de algn disturbio en uno o ms de los procedimientos
psicolgicos bsicos comprometidos en la comprensin o uso del lenguaje,
hablado o escrito, el cual puede manifestarse en una habilidad imperfecta para
escuchar, pensar, hablar, leer, escribir, ortografa, o realizar clculos
matemticos. El trmino incluye tales condiciones como los desrdenes
preceptales, lesiones cerebrales, disfuncin cerebral mnima, dislexia, y afasia
del desarrollo. El trmino no incluye a los nios que tienen problemas del
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 27 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
aprendizaje que principalmente son el resultado de discapacidades visuales,
auditivas o motrices, del retraso mental, de problemas emocionales, o de las
desventajas culturales, econmicas o ambientales.
Impedimentos del habla o lenguaje:
Un problema de la comunicacin como, por ejemplo, el tartamudeo, un
impedimento de la articulacin, o un impedimento del lenguaje o voz, lo cual
afecta adversamente el desempeo escolar del nio.
Lesin cerebral traumtica:
Una herida al cerebro, causada por alguna fuerza fsica externa, lo cual resulta
en una discapacidad funcional, total o parcial, o algn impedimento
psico-social. El trmino no incluye las lesiones cerebrales congnitas ni las que
resultan en una degeneracin, ni las lesiones cerebrales inducidas por algn
trauma sufrido por el nio al nacer.
FIGURA 1.18 TERAPIAS DE LENGUAJE, POSICIONAMIENTO ESPACIAL Y DE INTEGRACIN
Teletn un aporte a la discapacidad:
Teletn es un proyecto de Unidad. Es un compromiso, y un fenmeno social
perdurable, sobre la base de una institucin slida, un lder de la televisin,
empresas de consumo masivo y una red nacional de televisin, que produjo una
revolucin en las comunicaciones.
El Teletn cre una frmula distinta de solidaridad. Por eso, la campaa,
porque pasa a ser dominio de todas las personas, es la suma de millones de
personas, la que se convierte en un hecho nacional.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 28 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
El mundo globalizado y los avances e innovaciones tecnolgicos que se
producen en el pas son susceptibles de ser transferidos a otras naciones en
forma expedita. Los pases en general y Chile en particular han adoptado
economas de libre mercado, lo que ha llevado a las organizaciones a adaptarse
a las exigencias de sta. Teletn debe preparar a los jvenes que rehabilita para
esa realidad.
Las exigencias de eficiencia en el uso de los recursos y capacidad para competir
con otras entidades, nacionales y extranjeras, ya no son un patrimonio de las
organizaciones con fines de lucro, sino que son exigencias que se hacen para la
mayora de las organizaciones incluidas las sin fines de lucro.
La eficiencia en su gestin es un imperativo tico y de sobre - vivencia para la
Teletn.
Existe una clara tendencia hacia una administracin profesional de las
instituciones de beneficencia.
La industria de la beneficencia ha aumentado. Cada ao aparecen instituciones
nuevas, destinadas a resolver los problemas sociales de la ms diversa ndole, lo
que genera una competencia entre stas por la captacin de los recursos
limitados, basados en la solidaridad.
La discapacidad es un tema emergente, por el cual la sociedad chilena est cada
vez ms abierta a su anlisis desde diversas aristas. Ello genera un clima ms
propicio para el desarrollo de iniciativas tendientes a mejorar las posibilidades
de desarrollo e integracin de las personas con discapacidad.
FIGURA 1.19 EMBLEMA DE LA INTEGRACIN
DE PERSONAS DISCAPACITADAS AL AMBIENTE LABORAL
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 29 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
A partir del decreto 490 del Ministerio de Educacin, en marzo de 1990 se
han dictado mltiples decretos y reglamentos para facilitar y normar la
incorporacin de los nios con necesidades educativas especiales al sistema
escolar chileno y especficamente a la escuela pre-bsica, bsica y media.
Este hecho ha influido positivamente en el pronstico social a largo plazo de los
nios discapacitados
Las expectativas de las personas con discapacidad, en trminos de
rehabilitacin, facilidades para la insercin, desarrollo de oportunidades para
integrarse a la sociedad, aumentarn y se acercarn cada vez ms a la de los
pases desarrollados, Esa exigencia deber incorporarse gradualmente, tanto a
la Teletn como la sociedad chilena.
Tipos de discapacidad.
Las estimaciones de las organizaciones mexicanas involucradas en el manejo de
la discapacidad sealan que en nuestro pas, los diferentes tipos de
discapacidad se encuentran en los siguientes porcentajes:
Discapacidad de la movilidad o del aparato locomotor 53%.
Discapacidad intelectual 20%.
Discapacidad de la comunicacin humana o Sordos 18%.
Ciegos y dbiles visuales 9%.
El Programa de Accin Mundial para las personas con discapacidad, fue
publicado por las Naciones Unidas en 1983, dicho documento estimaba, en ese
entonces, que en el mundo haba 500 millones de personas con discapacidades.
Segn esta fuente, en la mayora de los pases, por lo menos una de cada diez
personas tiene alguna deficiencia fsica, intelectual o sensorial, y por lo menos
el 25% de toda la poblacin se ve adversamente afectada por la presencia de la
discapacidad.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 30 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
FIGURA 1.20 LA DIFICIL TAREA DE LA REHABILITACIN
EI mismo programa indica que, segn un estudio realizado por expertos, por lo
menos el 70% de las personas con discapacidad vive en zonas donde no se
dispone de los servicios necesarios para ayudarles a superar sus limitaciones.
Por ello, en 1994 la Asamblea General de las Naciones Unidas aprob la
resolucin relativa a las "Normas Uniformes sobre la igualdad de oportunidades
para las Personas con Discapacidad, en razn de que en todos los pases hay
obstculos que limitan a este sector.
Las normas se constituyen as en un instrumento normativo y de accin, cuyo
objetivo es asegurar que las personas con discapacidad tengan los mismos
derechos y obligaciones que los dems. Asimismo, se considera que es
responsabilidad de los estados tomar las medidas adecuadas para eliminar las
barreras y que deben tambin participar las personas con discapacidad y sus
representantes.
El gobierno de Mxico determin en el Plan Nacional de Desarrollo 1995-2000
los lineamientos generales para la atencin de las personas con discapacidad y
la creacin de una cultura de comprensin, aceptacin y respeto de la
discapacidad. Estableci que deber proporcionarse atencin integral a las
personas con discapacidad, para lo cual es necesario promover medidas
eficaces para prevenir, rehabilitar y lograr su participacin plena en la vida
social y en el desarrollo en igualdad de circunstancias.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 31 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
La discapacidad en cifras.
Al nivel internacional la importancia de los problemas econmicos y sociales de
la discapacidad est dada si consideramos que en el mundo hay ms de
quinientos millones de personas discapacitadas, y que en todas partes se
cometen abusos contra sus derechos derivados entre otras cosas de prejuicios
seculares.
De acuerdo al anlisis de la discapacidad en el mundo, conforme al Dossier
Informativo sobre las Normas Uniformes de las Naciones Unidas sobre la
Igualdad de Oportunidades para las Personas con Discapacidad, seala que un
98% de las personas discapacitadas que viven en los pases en vas de
desarrollo no tienen acceso a los servicios de rehabilitacin; que hay 20
millones de personas que necesitan sillas de ruedas; que 100 millones de
personas padecen minusvala causada por la mal nutricin; que en ningn pas
se cuenta con sistemas de transporte accesibles totalmente; que en algunos
pases el 90% de los nios discapacitados no vive ms de 20 aos, entre otros
datos
En el caso de Mxico, de acuerdo con los Resultados Definitivos Tabulados
Complementarios de la Encuesta sobre Discapacidad realizada por el Instituto
Nacional de Estadstica Geografa e Informtica (INEGI), esta importancia se
refleja en el hecho de que a nivel nacional, de un total de 19,848,319 hogares
(100%), 1,915,137 hogares (9.65%) tienen al menos un miembro integrante con
algn tipo de discapacidad.
De acuerdo con los informes elaborados por la subcomisin de Rehabilitacin
Laboral, Capacitacin y Trabajo sealada, del total de discapacitados que tiene
registrados, el 53 % lo es de discapacidad locomotora, el 20 % de discapacidad
intelectual, un 18 % del lenguaje o del habla, y un 9 % lo es de discapacidad
visual. Asimismo, del total de hogares con algn miembro discapacitado el
9.03% percibe entre tres y cinco salarios mnimos, y el 13.78% no percibe
ninguno.
Conforme al Sistema Nacional de Informacin sobre Poblacin con
Discapacidad, en el pas existan al ao pasado 741 asociaciones de personas
con discapacidad de las cuales 628, el 85%, manifestaron tener algn registro
oficial;
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 32 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
113 equivalente al 15% no lo manifestaron. Las entidades federativas con mayor
nmero de asociaciones son: el Distrito Federal con 114, Coahuila con 78,
Jalisco con 65 y Guanajuato con 49.
De las 741 asociaciones registradas en el Sistema, 91 (12.28%) tienen 20 o ms
aos de fundadas, 166 (22.40%) tienen de 10 a 19 aos, 143 (19.30%) tienen
de.6 a 9 aos, 148 (19.97%) d tienen de 3 a 5, y 171 (23.08%) que son la
mayora, tienen menos de 3 aos; 22 (2.97%) no especificaron el dato.
Asimismo de las 741 asociaciones, 262 (35.36%) atienden el tipo de
discapacidad visual, 242 (32.66%) la auditiva, 298 (40,21%) la del habla o del
lenguaje, 435 (58.70%) la discapacidad neuromotriz, 403 (54.38) la intelectual,
y 69 (9.31%) atienden otro tipo de discapacidad, pudiendo atender una
asociacin varios tipos.
En igual forma los servicios que brindan estas asociaciones son: atencin
mdica 191 (25.77%), rehabilitacin fsica 401 (54.12%), educacin especial 432
(58.29%), orientacin psicolgica 372 (50.20%), capacitacin laboral 386
(52.09%), eventos deportivos y recreativos 460 (62.08%), eventos culturales y
artsticos 345 (46.56%), y otro tipo de servicio 176 (23.75%), pudiendo una
asociacin incidir en varios servicios.
As pues, el rango social de la discapacidad lo podemos valorar si tomamos en
cuenta que en Mxico se estima que existen al menos 10 millones de personas
con alguna de sus manifestaciones, cifra que, por gnero, se distribuye 50%
mujeres y 50% hombres. Algo muy delicado es que cerca de 2 millones 500 mil
personas con discapacidad, son nias y nios.
Detrs de ese impacto demogrfico muy alarmante, tenemos que tomar en
consideracin que solamente el 24% del total de personas con discapacidad,
cuentan con algn empleo e ingreso; el 76% restante es considerado como
poblacin inactiva. Lo que constituye una desigualdad profunda que debemos
valorar.
En efecto, debemos mencionar que de las personas con discapacidad que no
tienen empleo, el 52% no lo tienen debido a su condicin, entindase por ello,
que el mercado de trabajo y la sociedad no los considera aptos para emplearlos.
Esto ltimo debe contrastarse con el hecho de que slo un 30% de las personas
con discapacidad no empleadas, realmente est imposibilitada para trabajar, ya
sea por problemas crnicos de salud, avanzada edad o incapacidad total; del
mismo modo que un 15% vive de sus rentas, al amparo de pensiones o
jubilaciones.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 33 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
De fondo, cabe destacar que de los 10 millones, el 82% depende parcial o
totalmente de sus familiares o amigos y el 2% de la caridad y an de la limosna.
Como puede apreciarse, 10 millones de mexicanos en esta condicin, implican
al 10% de nuestra poblacin y sus efectos se multiplican si consideramos lo que
representa en costo de sobrevivencia para las familias.
Ante esta realidad, consideramos que uno de los rasgos ms positivos que
podemos encontrar en los avances de nuestra cultura social hacia las personas
con discapacidad, es existen sentimientos de pertenencia colectiva y autntica
preocupacin pblica y privada por nuestra poblacin discapacitada
FIGURA 1.21 TERAPIAS DE REHABILITACIN
En el ao de 1995, por vez primera en la historia contempornea de Mxico, la
problemtica de la poblacin con discapacidad es elevada al Plan Nacional de
Desarrollo 1995- 2000, con la puesta en marcha del "Programa Nacional para el
Bienestar e Incorporacin al Desarrollo de las Personas con Discapacidad",
como el eje rector de las polticas pblicas.
Lo anterior, ha permitido conocer a fondo los problemas, definir mejores
programas o acciones y sensibilizarnos de que el marco jurdico nacional o
local, necesita constantemente actualizarse a las realidades de la sociedad. As,
se han promulgado en todas las entidades de la Repblica Leyes de Integracin
Social que comprenden los derechos de las personas con discapacidad, cuyo
sentido es articular las responsabilidades del Gobierno y el conjunto de las
Instituciones en cada entidad.
Principales causas de discapacidad.
Podemos hablar de dos grandes grupos: causas congnitas y adquiridas.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 34 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Causas congnitas.
1. Sndromes prenatales: Infecciones durante el embarazo (enfermedades).
Agentes txicos (alcohol, drogas, tabaco). Agentes fsicos (radiaciones,
traumatismos). Prematurez. Incompatibilidad sangunea. Trastornos genticos.
2. Sndromes peri natales: (en el momento del nacimiento): Anoxia. Sufrimiento
fetal. Traumatismos obsttricos (frceps). Placenta previa.
3. Sndromes postnatales: Infecciones. Mala nutricin. Intoxicaciones.
Traumatismos crneo-enceflicos.
Causas adquiridas.
1) Condiciones de vida deficientes: Vivienda inadecuada. Carencia de servicios
sanitarios.
Deficiencia del orden y limpieza del medio en que se vive.
2) Condiciones familiares y culturales: Falta de motivacin y estmulo para el
desarrollo de la inteligencia. Desintegracin familiar.
Como ayudar al discapacitado.
El apstol Pablo dice en la Biblia: "Tener amor es saber soportar; es ser
bondadoso; es no tener envidia, ni ser presumido, ni orgulloso, ni grosero, ni
egosta... Tener amor es sufrirlo todo, creerlo todo, esperarlo todo, soportarlo
todo". (1 Corintios 13)
Dios anhela que tomemos de l, la fuerza y la paciencia que necesitemos para
poder brindar ese amor que parte del Espritu. Este amor se manifiesta en la
aceptacin de los discapacitados, en su inclusin en el mbito social, y en su
integracin en la vida toda.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 35 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
FIGURA 1.22 FABRICCIN DE PRTESIS PARA AYUDA A DISCAPACITADOS.
Aceptacin. La aceptacin de una persona discapacitada parte de la premisa de
que es un ser humano igual a todos. La aceptacin, sin embargo, no es
resignarse y dejar que la vida haga con l lo que le plazca. Aceptarlo significa
reconocerlo con sus dificultades. Saber de sus problemas, hablarlos con l, ser
sinceros y, a pesar de ello, saber que podemos hacer mucho juntos.
FIGURA 1.23 TANTO LA AYUDA DE LOS PADRES COMO DE LOS TERAPISTAS ES MUY IMPORTANTE PARA LA
REHABILITACIN INTEGRAL DEL PACIENTE.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 36 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Inclusin. La inclusin es en primer lugar una actitud interior, una forma de
tener presente al discapacitado an cuando no se cuente con las comodidades
fsicas para atenderlo, una actitud que parte del amor. Incluir al discapacitado
al ambiente social slo es posible cuando en primer lugar se lo incluye en las
actividades familiares. La familia es tambin para el discapacitado, la base y el
ncleo primario de sus relaciones sociales.
Integracin. Integrar a un discapacitado implica adems de aceptarlo e incluirlo,
permitir que se desarrolle y realice como persona. La integracin implica
proveer al discapacitado las condiciones necesarias para que logre su mximo
desarrollo en el plano fsico, psquico, y espiritual.
La aceptacin, inclusin, e integracin del discapacitado es posible cuando
conocemos sus necesidades, que son las necesidades bsicas de todo ser
humano. Para ello es apropiado formar o participar de grupos en donde se
permita a padres, tutores y hermanos, expresar tanto sus frustraciones, su
dolor, su pena y su enojo, como tambin sus alegras, sus xitos, y sus
victorias. Es aconsejable escuchar con inters y sinceridad, y animarse a
compartir los unos con los otros.
Resulta apropiado contar con profesionales que puedan ayudarles, tales como
un consejero espiritual, un maestro de educacin especial; un mdico
especialista; un psiclogo, un asistente social, u otro. Estas personas pueden
darles consejos y asesora en sus necesidades.
La familia del discapacitado es el lugar en dnde el mismo aprende a sentirse
aceptado, incluido e integrado. Especial funcin les atae a los padres en la
superacin de sus culpas y en la aceptacin de este hijo. Es en la familia sana
que acepta la presencia de un hijo discapacitado y lo ayuda a crecer, en donde
encuentra el mejor ambiente para desarrollarse normalmente.
"La discapacidad, su aceptacin e integracin, dependen en gran parte
de la sociedad. Pero no slo de los adelantos cientficos y mdicos que los
puedan ayudar a desarrollarse mejor, sino principalmente del amor. Y
debemos el mrito a Dios, quien es amor y ensea a amar."
El trabajo se decidi realizar en conjunto de una institucin mexicana, el
Centro de Rehabilitacin Integral Teletn, ubicado en la va Gustavo Baz
en Tlanepantla, ya que ellos estn en contacto permanente con ste tipo
de
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 37 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
personas y nos pueden orientar de que tipo y que forma son las que
necesitan para darles a sus pacientes un mejor trato para su rehabilitacin,
adaptacin e reintegracin a la sociedad.
En ste centro se cuenta con una tecnologa avanzada con lo que respecta
a terapias de rehabilitacin as como de sus instalaciones, pero an as,
cuenta con deficiencias en algunos departamentos, ya sea por que el
equipo es muy caro o no se puede conseguir en nuestro pas.
Nuestro objetivo primordial es el de con ayuda del centro, ayudar a que
este retraso que tienen en estos momentos, no sea un factor de
impedimento para que no se les de una rehabilitacin de calidad.
El centro cuenta con diversas reas, dentro de las cuales se puede nombrar
a un rea de especialistas, que se encargan de evaluar a los pacientes y su
grado de discapacidad, es aqu donde se deciden los tratamientos y
terapias a seguir; el rea de rehabilitacin, integracin y aprendizaje,
donde podemos ubicar a la casita que es una representacin de una casa,
en donde se ensea a los pacientes su funcin dentro de sta, adems que
se les ensea para que sirve cada instrumento o aparato electrodomstico,
los diferentes tipos de cerrojos, dentro de ste mismo espacio se cuenta
con un rea de lenguaje, que es donde se ensea a los alumnos a
pronunciar correctamente as como hablar. En otro espacio se cuenta con
un rea la cual tiene diversos objetos, cuyo propsito es le de ensearles a
los pacientes como hacerlos y su correcto funcionamiento aqu entra lo
que es el correcto uso de cubiertos, utensilios de escritura.
Otra de las reas muy importante es una en donde se les ensea a los
pacientes a ser un poco ms independientes y a integrarlos en una
comunidad. Para esto se utilizan dos reas, una que es de actividades
manuales en donde se les ensea a cocer, realizar distintas labores
manuales as como a preparar diversos platillos alimenticios sencillos de
manera adecuada, para integracin en un ambiente de trabajo con diversas
personas se cuenta con el taller musical, parte que se les ensea a los
pacientes a trabajar en equipo y a tiempos especficos se les ensea a tocar
un instrumento.
Todo este tipo de terapias son las que hacen que el paciente tenga una
rehabilitacin integral y sobre todo de calidad.
Pero a pesar de que estas reas son muy importantes y vitales para la
rehabilitacin no son las esenciales, ya que para realizar todas estas es
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 38 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
necesario de que el paciente cuente con la capacidad y habilidad de
coordinar sus extremidades, tanto superiores como inferiores.
Para ayudarlos con esto se tiene el rea de mecanoterapia e hidroterapia.
En la primera se cuenta con un espacio grande el cual est diseado y
adaptado para que los pacientes tomen conciencia de sus movimientos y
empiecen a realizarlos de manera eficiente. Aqu se cuenta con camas y
distintos elementos para que se ayude a los pacientes a su coordinacin
motriz.
Entere los diversos aparatos con los que cuenta son pesas, barras paralelas,
carruseles, pisos de diferentes texturas e inclinaciones. En sta rea se
cuenta con unos aparatos de fluido terapia, el cual consta de maz
quebrado en un recipiente. El paciente mete la extremidad afectada,
cuando el aparato comienza a trabajar, lanza el maz a la extremidad a
cierta presin y empieza a circular una corriente de aire caliente, lo que da
la sensacin de que el miembro se encuentra en una hidroterapia.
Desgraciadamente este tipo de mecanismos son caros y difciles de
conseguir.
En la segunda rea, hidroterapia, se cuenta con diversos materiales y
mecanismos uno de los ms importantes es la piscina, lugar central y rigen
de esta tesis.
El objetivo de nuestro proyecto es disear dos gras (una mvil y otra fija),
empleando elementos mecnicos y elctricos, as como demostrar las
grandes aplicaciones que se le pueden dar a la ingeniera en robtica
industrial enfocado al rea de rehabilitacin.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 39 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
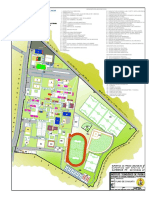
FIGURA 1.24 LAYOUT DEL REA DE HIDROTERAPIA DEL CENTRO DE REHABILITACIN TELETN
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 40 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
FIGURA 1.25 REA DE HIDROTERAPIA DEL CENTRO DE REHABILITACIN TELETN
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 41 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
CAPTULO
2
EN ESTE CAPTULO SE ESPECIFICAN LAS DIVERSAS GRAS
PARA USO INDUSTRIAL Y PARA PACIENTES CON ALGUNA
DISCAPACIDAD, AS COMO SE EMPIEZAN A VER LOS
REQUERIMIENTOS DE MANERA MAS DETALLADA DE LAS
GRAS SOLICITADAS POR EL CENTRO DE REHABILITACIN
TELETON.
LA SEGURIDAD ES MUY IMPORTANTE YA QUE ALGN
ERROR O FALLO SE PUEDE TRANFORMAR EN ALGUN
ACCIDENTE, ES POR ESO QUE LA SEGURIDAD Y SUS
REQUERIMIENTOS TAMBIN SON TOMADOS EN CUENTA.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 42 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
La Gras Industriales.
La gra es una mquina que se utiliza para desplazar objetos pesados, deforma
vertical y horizontalmente. La fuerza motriz puede ser manual o proceder de
motores elctricos, de combustin interna o de vapor. En cuanto a su forma, se
clasifican como gras de pescante, gras de brazo mvil y gras puente.
Las gras de pescante llevan un brazo o pescante horizontal situado sobre una
torre vertical. El movimiento horizontal de la carga se consigue girando el
pescante o toda la gra y desplazando el torno de izado, situado en un carro
mvil que corre a lo largo del brazo.
La gra de brazo mvil tiene un diseo en cantiliver y est formada por un brazo
articulado por la base con la parte inferior de un mstil vertical y sujeto en el
extremo mediante un cable que va a un torno situado en la parte superior del
mstil.
Para evitar que el mstil se caiga hacia el lado del brazo se emplean contrapesos
o tirantes. El movimiento horizontal se obtiene girando la gra y levantando o
bajando el brazo.
Las gras puente estn formadas por un pescante horizontal cuyos extremos se
desplazan sobre rieles perpendiculares al pescante. El torno de izado se desliza
en sentido longitudinal por el pescante mediante un carro. Las gras puente
normales se desplazan sobre rieles elevados, mientras que las llamadas gras
de prtico estn montadas sobre pilares que se mueven por rieles situados al
nivel del suelo.
FIGURA 2.1 GRA DE PESCANTE
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 43 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
La clasificacin de stas depende de su construccin y la forma que tomen.
Debido a que la divisin es muy grande solamente se tratarn las gras viajeras
y de tipo bandera; ya que stas mismas tambin tienen subdivisiones.
Gras Viajeras.
Dentro de las gras viajeras existen diferentes tipos las cuales se muestran a
continuacin:
Gras viajeras Bipuente.
FIGURA 2.2 GRA VIAJERA BIPUENTE
Gras viajeras Monopuente.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 44 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
FIGURA 2.3 GRA VIAJERA MONOPUENTE
Gras viajeras tipo Prtico.
FIGURA 2.4 GRA VIAJERA TIPO PRTICO
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 45 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Gras viajeras tipo Semiprtico.
FIGURA 2.5 GRA VIAJERA TIPO SEMIPORTICO
Gras viajeras tipo Banderas Mviles.
FIGURA 2.6 GRA VIAJERA TIPO BANDERA MVIL
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 46 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Gras Radiales.
FIGURA 2.7 GRA RADIAL
Existe otra categora, en sta se toman en cuenta las siguientes gras:
Gras Tipo Torre o de Tipo Bandera.
FIGURA 2.8 DIVERSAS GRAS TIPO BANDERA
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 47 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Gra Torre De Pluma Orientable. En la que el soporte giratorio de la pluma se
monta sobre la parte superior de una torre vertical, cuya parte inferior se une
a la base de la gra.
FIGURA 2.9 GRA TORRE DE PLUMA ORIENTABLE
Gra Torre Desmontable. Gra torre, concebida para su utilizacin en las obras
de construccin u otras aplicaciones, diseada para soportar frecuentes
montajes y desmontajes, as como traslados entre distintos emplazamientos.
FIGURA 2.10 GRA DE PLUMA ORIENTABLE Y SUS PARTES
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 48 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Gra Torre Desplegable. La pluma se monta sobre la parte superior de una
torre vertical orientable, donde su parte inferior se une a la base de la gra a
travs de un soporte giratorio y que est provista de los accesorios necesarios
para permitir un rpido plegado y desplegado de la torre y pluma.
FIGURA 2.11 GRA TORRE DESPLEGABLE
Gra Torre Desplazable. Es aquella cuya base est dotada de medios propios de
traslacin sobre carriles u otros medios y cuya altura mxima de montaje es tal
que sin ningn medio de anclaje adicional sea estable tanto en servicio como
fuera de servicio para las solicitaciones a las que vaya a estar sometida.
FIGURA 2.12 BASE DE UNA GRA TORRE DESPLAZABLE
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 49 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Dentro de este tipo de gras existen otras, las cuales son:
Gras Bandera Articuladas.
Las gras bandera articuladas autosoportadas y montadas en techo o puente
ofrecen una rotacin de 360 con opciones de tuberas internas de aire
comprimido, vaco o electrificacin hasta cualquier dispositivo soportado
ubicado en el extremo del brazo. Las gras bandera articuladas montadas en
pared ofrecen una rotacin de 200 del brazo interno y 360 de rotacin para el
brazo exterior.
Las gras bandera articuladas ofrecen menor altura de paso que cualquier otra
marca de gras bandera articuladas. Las gras bandera articuladas montadas
en puente tienen menor altura de paso que las gras de otros fabricantes y
pueden soportar casi cualquier tipo de manipulador.
FIGURA 2.13 Y 2.14 GRAS AUTOSOPORTADAS Y ARTICULADAS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 50 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Al igual se tienen gras para uso especfico como las que se muestran a
continuacin:
Por ejemplo se tienen gras para carros de ferrocarril.
FIGURA 2.15 GRA ESPECIFICA PARA CARROS DE FERROCARRIL
Para solucionar algunos problemas que pueden ser problemticos y que pueden
poner en riesgo la vida humana; por ejemplo cuando se limpian los vidrios de
un edificio alto.
FIGURA 2.16 GRA PARA LA LIMPIEZA DE VIDRIOS
O para transportar los bogies del metro
de la Ciudad de Mxico.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 51 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
FIGURA 2.17 GRA PARA TRANSPORTAR BOGIES
Gras Para Personas Discapacitadas.
Adems de estas gras industriales existe tambin otra divisin la cual es muy
importante para el ser humano. sta divisin incluyen gras para las personas
discapacitadas.
En cuanto a las gras para personas discapacitados, se requieren previas
valorizaciones, ya que en el mercado se cuentan con gras automticas
(elctricas), manuales (mecnicas).
Es por eso que el medico junto con los familiares del paciente deben de acordar
que tipo y que funciones son las necesarias para una integracin completa.
Aptitudes Ergonmicas.
o Es esencial valorar en primer lugar si la persona puede o no ser
entrenada para realizar la transferencia independientemente, o si esto
puede ser conseguido con una ayuda mnima o una simple modificacin,
como reordenar los muebles en la habitacin o la adquisicin de un tipo
diferente de silla de ruedas. Si la transferencia independiente es
imposible, se debe considerar el uso de una gra.
o Una evaluacin completa debe contemplar: la patologa, el curso de la
enfermedad y la respuesta al tratamiento, las capacidades y deseos de la
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 52 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
persona y sus cuidadores, los soportes corporales disponibles y las
caractersticas arquitectnicas del hbitat.
o Se deber determinar si se dispone de un asistente competente para
manejar la gra y el soporte corporal o si el usuario podr realizarlo por si
mismo; s existe el espacio suficiente para maniobrar con una gra mvil,
particularmente en el cuarto de bao y el aseo, si se dispondr o no de un
espacio adecuado para almacenar la gra; si el edificio es apropiado para
la instalacin de un riel en el techo en caso de considerar necesaria una
gra de estas caractersticas.
o Las personas con discapacidad y su familia debern implicarse en la
seleccin de la gra; esta debe ser aceptada y probada por ellos para
comprobar que ser til en la vida diaria de la persona. Si no es
totalmente aceptada caer en desuso, el problema inicial permanecer sin
solucin y se habr realizado un gasto innecesario.
o La eleccin entre una gra mvil, fija o de techo depender del uso para el
que se destine, el espacio disponible y las habilidades del asistente.
o Para seleccionar el tipo de gra y soporte corporal ms adecuado para
cada individuo es esencial probarlos.
o El asistente debe ser entrenado para usar la gra y el soporte corporal
correctamente y con seguridad.
o Con la gra deben adjuntarse las instrucciones de uso y mantenimiento
que el usuario necesita.
o Unas pocas semanas despus de que la gra haya sido servida, la
persona que la prescribe debera visitar al usuario para comprobar que la
gra cubre las necesidades de ste y se est utilizando correctamente.
o Se comprobar el recorrido de elevacin para asegurarse de que la
persona pueda ser elevada y desde determinadas superficies; no todas
las gras pueden elevar a personas desde el suelo. El mtodo de elevar
desde el suelo debe ser demostrado al comprador.
Tipos y caractersticas de las gras.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 53 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
o Dependiendo del modelo, el mecanismo de elevacin es un sistema de
husillo o manivela, una bomba hidrulica o se activa por un sistema
elctrico.
o La gente mayor puede ser menos aprensiva a un sistema de manivela que
usar una bomba hidrulica que es ms cansado. Adems una mano est
libre para situar a la persona durante el descenso.
Dependiendo del tipo de instalacin y la movilidad de la gra, hay tres
tipos: gras fijas, gras de rieles o techo y gras mviles:
o Las gras fijas se instalan mediante un pie que queda fijo en el suelo o
bien un soporte anclado a la pared. Los anclajes deben ser firmes en
ambos casos. No permiten el traslado del usuario por el resto de la casa.
Otra posibilidad es una gra fija en la cual se puede acopiar un chasis
con ruedas para permitir el traslado por la casa.
FIGURAS 2. 18 Y 2. 19 GRAS FI JAS PARA DI SCAPACITADOS
o En las gras de techo, los rieles se colocan en el techo, ste debe soportar
el peso de la estructura y es imprescindible saber si rene las
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 54 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
caractersticas arquitectnicas necesarias. El recorrido est limitado
segn las necesidades del usuario.
GURA 2. 20 GRA DE TECHO PARA DI SCAPACI TADOS
o Las gras mviles disponen de una base con ruedas. La base puede ser
de anchura fija o regulable; la posibilidad de cerrar las patas para pasar
por lugares estrechos es imprescindible en la mayora de los casos, pero
se debe probar que la gra no se desestabilice con el peso del usuario.
Las gras mviles no permiten el giro del asiento o del soporte corporal
sobre su eje, por lo tanto deben aproximarse lo mximo posible a los
puntos entre los que se realizan las transferencias.
FIGURAS 2.21 Y 2.22 GRAS MOVILES PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 55 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
A continuacin vamos a hacer especial hincapi en el grupo de las gras
mviles puesto que son stas las que con mayor frecuencia podemos encontrar
en los centros residenciales o/y asistenciales y que pueden requerir
determinadas exigencias en cuanto a espacio, disposicin del mobiliario
(incluyendo los sanitarios), habilidad para su manejo, mantenimiento (sobre
todo las de alimentacin por batera), y la eleccin de los diferentes soportes
corporales (segn el uso y el tipo de usuario a que se destinen.
Especificaciones De Las Gas Moviles.
o Las gras mviles grandes son apropiadas para el uso en centros
hospitalarios y residencias donde hay espacio suficiente para maniobrar y
almacenarlas; las gras mviles de menor volumen, requieren un espacio
ms pequeo para maniobrar y para ser almacenadas, por lo tanto son
ms adecuadas para usarse en casas privadas donde el espacio es
restringido.
o Las gras mviles generalmente tienen una base ajustable en anchura.
La anchura determinar si la gra pasa a travs de las puertas y pasillos
y si posibilita la aproximacin al mobiliario, aparatos sanitarios, silla de
ruedas, etc.
o Cuando el recorrido a efectuar con la gra incluya diferentes superficies
(texturas) se producir cierto balanceo e inestabilidad de la persona
transportada.
o Los frenos de las ruedas son accionados para aumentar la estabilidad
durante la transferencia. Algunos de estos frenos son ms difciles de
liberar que otros y pueden daar los zapatos del ayudante.
o Es necesario un asistente que sea suficientemente fuerte para empujar y
maniobrar con la gra y capaz de manejar los soportes corporales.
o Habr que adecuar la altura de la baera (elevndola sobre unas patas o
quitando una seccin del panel de la baera, dejando un espacio libre que
"aleje" la base de la gra), salvo que la disposicin de la baera sea tal
que permita la aproximacin de la gra (la base debera ser regulable en
anchura).
o Debe existir un espacio para almacenar la gra cuando no se use.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 56 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
o Debe haber accesos libres de desniveles en las reas de uso de la gra.
o Deber existir un servicio tcnico que asegure el mantenimiento de la
gra y las posibles reparaciones, as como la provisin de piezas de
recambio o de accesorios.
FIGURA 2.23 y 2.24 ESQUEMAS DE DIVERSAS GRAS Y SOPORTES PARA PERSONAS CON ALGUNA
DISCAPACIDAD
Soportes corporales para discapacitados.
Al elegir el tipo de soporte corporal de una gra, es necesario considerar varios
puntos, que determinarn tanto la forma como el material de que est hecho:
El uso al que va destinado: bao, traslado de la cama a la silla de ruedas,
inodoro, etc.
Las circunstancias particulares de cada usuario: Caractersticas
antropomtricas y fisiolgicas, edad, el tipo de discapacidad, existencia de
patologas asociadas, (rigideces articulares, hipotona, deficiencias sensoriales);
presencia o no de alteraciones cognitivas (desorientacin tempo-espacial, por
ejemplo) y las necesidades y preferencias subjetivas (miedo, sensacin de
inseguridad).
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 57 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
o El asistente habitual: Su fuerza y su destreza sern determinantes en la
eleccin de uno u otro soporte.
o Si va a ser utilizado en una Institucin, habr que elegir el modelo que
sirva para el mayor nmero de usuarios posible y sea ms rpido y
seguro de colocar, aunque siempre se necesitarn soportes especiales
adicionales dependiendo de los beneficiarios.
Existen diferentes tipos de soportes corporales para diferentes fines:
A) Asiento rgido: Est formado por un asiento y un respaldo rgidos. El
usuario es colocado generalmente en sentido perpendicular al desplazamiento.
Aunque tenga banda o cinturn de seguridad, es necesario que la persona que
es trasladada colabore y no presente afectaciones msculo-esquelticas severas
en el tronco que dificulten su estabilidad.
B) Camilla rgida: Lo ms comn es que sea articulada, dividida en tres planos
graduables en inclinacin, de forma que el traslado pueda hacerse en postura
semisentada, con las piernas elevadas o totalmente horizontal.
Debe disponer de un accesorio de seguridad, como una barandilla escamoteable
o un cinturn.
C) Soporte corporal no rgido o arns: Normalmente es el ms fcil de colocar
y si tiene la forma adecuada para el uso al que est destinado, es el ms seguro,
pero el balanceo puede provocar pnico en personas en estados confusionales
como ocurre con las demencias.
Respecto a la forma, los arneses de dos bandas son fciles de colocar: una
banda se sita bajo los muslos y la otra bajo las axilas rodeando la zona dorsal
de la espalda. Estn desaconsejados si existen espasmos extensores y si hay un
pobre control de la cabeza o musculatura dbil en cintura escapular o
amputaciones de miembros superiores al nivel del hombro.
Un arns en forma de "U" dividido para mantener las piernas separadas facilita
la higiene ntima y puede colocarse sin demasiadas dificultades en la silla de
ruedas, pero si no sobrepasa la altura de las axilas tiene las mismas
contraindicaciones que el de dos bandas.
Los de tipo hamaca de una pieza dan un soporte total al cuerpo y son los ms
adecuados para personas con una discapacidad muy severa que necesite una
sujecin completa.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 58 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Algunos soportes corporales no rgidos se fabrican en varias tallas, otros
disponen de varios enganches o enganches regulables por hebillas para
adaptarse al tamao del usuario o para permitir acomodar su postura en
diferentes posiciones. Tambin los hay disponibles en diferentes materiales en
funcin de su uso. Por ejemplo: de malla de nylon para el bao que faciliten la
evacuacin del agua.
El fabricante de la gra ofrece la posibilidad de elegir entre distintos soportes no
rgidos y etiquetar correctamente stos con sus datos, instrucciones de lavado y
talla o carga soportable.
FIGURA 2.25 GRA TIPO BANDERA CON ASIENTO FLEXIBLE PARA PISCINA
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 59 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Requerimientos de las gras solicitadas por el centro de rehabilitacin Teletn.
Al pensar en todas las discapacidades y las limitantes que se obtienen en el
centro de rehabilitacin se decidi disear y realizar un sistema de gras, las
cuales den un mejor aprovechamiento de las instalaciones y as se pueda
ascender a ms pacientes con la mejor calidad.
Gra Fija.
Por las diversas funcionalidades, se pens hacer una gra fija, la cual estar
montada en el extremo de la piscina. Hay que tomar en cuenta que la piscina en
este centro se encuentra por arriba del nivel del piso lo cual dificulta el acceso
de los pacientes obligando a los familiares a cargarlos para su ingreso,
representando esto un riesgo latente.
Se desea realizar este ingreso de manera semiautomtica, evitando as que el
paciente, su familiar y el terapista lleguen a tener algn imprevisto. El sistema
de gra fija constara de una gra tipo bandera.
sta contar con un aditamento de soporte blando para sujetar a la persona, el
asiento flexible se montar en el cuerpo de la persona previamente, el paciente
arribar en camilla o silla de ruedas al lugar donde est montada la gra, se
sujetar el asiento a la gra y con un sistema de izaje se levantar lentamente a
la persona hasta conseguir la altura adecuada, se girar la bandera de la gra y
posteriormente se bajar a la persona lentamente depositndola en la piscina
lista para que ya sea un familiar o un terapista suelte el asiento flexible
liberando a la persona, dejando a la gra lista para trasladar a otro paciente.
Lo que se busca con esta gra es hacer ms eficiente el traslado del paciente y
disminuir el tiempo de ingreso de las personas a la piscina al igual que
aumentar la seguridad de todos los usuarios de sta.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 60 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
FIGURA 2.26 DISEO PREVIO DE LA ESTRUCTURA DE LA GRA FIJA UBICADA EN UN EXTREMO DE LA PISCINA.
Esta gra tambin es til para un desalojo rpido y eficaz de la piscina y todos
sus usuarios.
FIGURA 2.27 DIBUJO ESTRUCTURAL DE LA GRA FIJA PROPUESTA PARA EL CENTRO DE REHABILITACIN
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 61 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Gra Mvil.
Pero no solamente se desea ayudar al ingreso de las personas de la piscina. El
centro de rehabilitacin cuenta con diversas tinas las cuales son altas y
estrechas, diseadas nicamente, para una persona ya sea acostada o semi
acostada.
El problema de este tipo de tinas es que debido a la altura es difcil acceder a
los pacientes en esta, teniendo como consecuencia la poca utilizacin de estas.
Es de vital importancia y prioridad para el centro, contar con un sistema de
gra capaz de adaptarse a los diferentes modelos de tinas.
De aqu surgen la idea de disear una gra mvil, la cual cuenta con un
sistema semiautomtico de izaje, que sea ligera, resistente y que cumpla con el
objetivo de introducir a los pacientes en las estrechas tinas sin lastimarlos o
tensarlos, la gra mvil propuesta es tipo bandera, la cual estar soportada por
un sistema de ruedas, que permitan trasladar a cualquier lugar del centro.
FIGURA 2.28 DIBUJO ESTRUCTURAL DE LA GRA MOVIL PROPUESTA PARA EL CENTRO DE REHABILITACIN.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 62 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Por su diseo la gra proporcionar estabilidad al paciente a la hora de la
traslacin o el izaje por medio de movimientos lentos y suaves, lo cual ayudar
a que los pacientes no se preocupen y tensen mediante el izaje.
Se disea con un sistema de cables que tiene dos puntos de sujecin lo cual
solucionar el problema de tambaleo o inestabilidad.
FIGURA 2.29 VISTA ISOMETRICA DE LA GRUA MOVIL PROPUESTA
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 63 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Debido a que en el centro se cuenta con una diversidad muy grande de
pacientes se tom en cuenta que muchos de ellos no pueden permanecer
sentados; por lo cual se disearon dos tipos de accesorios, de los cuales uno es
para personas que se puedan sentar, ste consta con asiento flexible el cual
ser colocado previamente en el cuerpo del paciente, este se sujetar a la gra
para su traslado y su posterior liberacin.
FIGURA 2.30 REPRESENTACIN DE LA GRA MOVIL PROPUESTA CON UN ASIENTO FLEXIBLE ESQUEMATIZANDO
LA REPRESENTACIN SIMBOLICA DEL IZAJE A LA PERSONA.
El otro tipo de asiento que es para aquella persona que no pueden o se lastiman
al sentarse es un accesorio tipo camilla el cual estar sujeto de 6 puntos para
tener la estabilidad requerida.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 64 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
FIGURA 2.31 REPRESENTACIN DE LA GRA MOVIL CON UN SOPORTE TIPO CAMILLA SIMULANDO UN IZAJE.
Con esta gra se pretende emplear el uso de los diversas tinas de hidroterapia
del rea de rehabilitacin ya que no se usan frecuentemente como es necesario
debido a los problemas de acceso y desalojo de los pacientes; problemas que
quedan automticamente resueltos con la implementacin de esta gra.
Como se puede observar, la funcionalidad de estas dos gras no se limita a que
se utilicen nicamente en el centro de rehabilitacin, sino que tambin pueden
ser tiles, por sus dimensiones y caractersticas de diseo a ser adquiridas por
particulares.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 65 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Algunos de los usos que se le puede dar a ste tipo de gras es para transportar
a una persona ya grande o pesada de una silla de ruedas a su cama, evitando
as que las personas encargadas de su cuidado lleguen a sufrir alguna lesin
dorso lumbar.
ste es otro de los objetivos de sta tesis, a parte de lograr mecanismos los
cuales ayuden a la rehabilitacin y tratamiento de las personas con
discapacidad y de ayudarlos a sentirse ms independientes; es hacer del trabajo
de las enfermeras, familiares, terapistas ms fciles, ya que al cargar a una
persona muy grande puede resultar en lesiones de la espalda.
Con estas gras se pretende dar tanto a los pacientes como a sus personas
cercanas ms libertad; lo cual ayuda a los pacientes a una integracin y
rehabilitacin pronta.
Aspectos De Seguridad.
Algunos aspectos de seguridad que se deben considerar para el uso de la gra
mvil y fija.
Objetivo
Exponer los riesgos especficos que se originan en los trabajos realizados con
gras mviles y fijas as como las medidas preventivas y sistemas de seguridad
que han de adoptarse.
Descripcin de las mquinas.
En el ms amplio sentido de su acepcin denominaremos gra mvil a todo
conjunto formado por un vehculo portante, sobre ruedas o sobre orugas,
dotado de sistemas de propulsin y direccin propios sobre cuyo chasis se
acopla un aparato de elevacin tipo pluma.
Adoptada la anterior definicin, se hace evidente que las numerosas
posibilidades que se ofrecen una gra han de dar lugar a la existencia de una
variada gama de modelos, que se extiende desde los destinados al remolque de
objetos pesados hasta los que han sido concebidos exclusivamente para la
trasportacin de personas discapacitadas.
La gra fija es una mquina empleada para la elevacin de cargas, por medio de
un gancho suspendido de un cable, y su transporte, en un radio de varios
metros, a todos los niveles y en todas direcciones.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 66 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Esta constituida esencialmente por una columna metlica, con un brazo
horizontal giratorio, y los motores de orientacin, elevacin y distribucin o
traslacin de la carga, disponiendo adems un motor de traslacin de la gra
cuando se encuentra dispuesta sobre carriles.
Riesgos detectados.
Los que con mayor frecuencia se presentan en los trabajos realizados con gras
mviles, que consideramos especficos de esta mquina aunque tambin
pueden serlo de otras, son los que siguen:
Vuelco de la mquina.
Que puede producirse por nivelacin defectuosa de la misma, por fallo del
terreno donde se asienta, por sobrepasarse el mximo momento de carga
admisible.
Precipitacin de da carga.
Por fallo en el circuito elctrico, frenos, por rotura de cables o de otros
elementos auxiliares (ganchos, poleas, etc.) y/o por enganche deficientemente
realizados.
Medidas de seguridad.
Son medidas tcnicas y equipos que anulan un riesgo o bien dan proteccin sin
condicionar el proceso operativo.
Como se ha expuesto con anterioridad cada uno de estos riesgos tiene su origen
en una o varias causas, algunas de las cuales pueden ser eliminadas mediante
los sistemas de seguridad que se describen a continuacin, para impedir que
llegue a producirse la situacin de peligro.
Limitador del momento de carga.
Dispositivo automtico de seguridad para gras mviles de todo tipo, que
previene contra los riesgos de sobrecarga o de vuelco por sobrepasarse el
mximo momento de carga admisible.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 67 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
La finalidad de este dispositivo es impedir que se sobrepase la "curva de carga a
seguir" indicada por el fabricante.
Generalmente acta emitiendo una seal de alarma, luminosa o sonora, cuando
el momento de carga llega a ser el 75% del mximo admisible y bloqueando los
circuitos al alcanzarse el 85% del valor de aqul.
Limitador de final de carrera del gancho.
Dispositivo elctrico que corta automticamente el suministro de fuerza cuando
el gancho se encuentra a la distancia mnima admisible del extremo de la
pluma.
Pestillo de seguridad.
Dispositivo incorporado a los ganchos para evitar que los cables, estrobos o
eslingas que soportan la carga puedan salirse de aquellos.
Detector de tensin.
Dispositivo electrnico que emite una seal cuando la pluma se aproxima a una
lnea de alta tensin, al ser detectado el campo elctrico por las sondas fijadas
en el extremo de la flecha.
Medidas preventivas.
Nos limitaremos a describir solamente las que han de adoptarse ante los riesgos
especficos de los trabajos con gra mvil, por entender que no corresponde
tratar en este lugar las relativas a riesgos de tipo general.
Ante el Riesgo de vuelco.
Se admite que una gra es segura contra el riesgo de vuelco cuando, trabajando
en la arista de vuelco ms desfavorable, entendindose por arista de vuelco ms
desfavorable aqulla de las lneas definidas por dos apoyos consecutivos cuya
distancia a la vertical que pasa por el centro de gravedad de toda la mquina, es
menor.
Es de vital importancia que su nivelacin sea adecuada para que el mnimo
momento de vuelco que pueda resultar sobre la arista ms desfavorable durante
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 68 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
el giro de la pluma sea siempre superior al mximo momento de carga
admisible, que en ningn caso deber sobrepasarse.
Sobre el terreno.
El emplazamiento de la mquina se efectuar evitando las irregularidades del
piso y explanando su superficie si fuera preciso al objeto de conseguir que la
gra quede perfectamente nivelada, nivelacin que deber ser verificada antes
de iniciarse los trabajos que sern detenidos de forma inmediata
En la maniobra.
La ejecucin segura de una maniobra exige el conocimiento del peso de la carga
por lo que, de no ser previamente conocido, deber obtenerse una aproximacin
por exceso, cubicndola y aplicndole un peso especfico entre 7,85 y 8 Kg/dm3
para aceros. Al peso de la carga se le sumar el de los elementos auxiliares
(estrobos, grilletes, etc.).
Conocido el peso de la carga, el gruista verificar en las tablas de trabajo,
propias de cada gra, que los ngulos de elevacin y alcance de la flecha
seleccionados son correctos, de no ser as deber modificar alguno de dichos
parmetros.
Respecto a la zona de maniobra.
Se entender por zona de maniobra todo el espacio que cubra la gra. Esta
zona deber estar libre de obstculos.
Respecto a la ejecucin del trabajo.
En toda maniobra debe existir un encargado, con la formacin y capacidad
necesaria para poder dirigirla, que ser responsable de su correcta ejecucin, el
cual podr estar auxiliado por uno o varios ayudantes, si su complejidad as lo
requiere.
Mantenimiento preventivo.
El mantenimiento adecuado de todo equipo tiene como consecuencia directa
una considerable reduccin de averas, lo cual a su vez hace disminuir en la
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 69 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
misma proporcin la probabilidad de que se produzcan accidentes provocados
por aqullas. Tiene por ello gran importancia realizar el mantenimiento
preventivo tanto de la propia mquina como de los elementos auxiliares.
De los elementos auxiliares.
Los elementos auxiliares tales como cables de elevacin, deben ser examinados
enteramente por persona competente por lo menos una vez cada seis meses.
Con propsitos de identificacin, de modo que puedan llevarse registros de tales
exmenes, debe marcarse un nmero de referencia en cada elemento y en el
caso de eslingas se fijar una marca o etiqueta de metal numerada.
Comportamiento Humano.
Actitudes Psico-Fsicas.
Las maniobras de las gras conllevan grandes responsabilidades por lo que
solamente deben confiarse a personas capaces, exentas de contraindicaciones
fsicas (limitacin de las capacidades visuales y auditivas, impedimentos fsicos
de otra naturaleza, etc.) dotadas de rapidez de decisin y de reaccin y que
posean los conocimientos tcnicos precisos.
Mediante un cuidadoso examen mdico y psicotcnico es posible realizar una
seleccin previa del personal apto, pero su especializacin en maniobras con la
gra requiere tambin efectuar, con resultado positivo, un perodo de
instruccin terica y de enseanza prctica como ayudante de maquinista
calificado.
Normas De Seguridad.
Antes De Iniciar El Funcionamiento.
EI terapista debe probar el buen funcionamiento de todos los movimientos y de
los dispositivos de seguridad de la gra.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 70 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Durante El Funcionamiento.
El operario de la gra no puede abandonar el puesto mientras penda un
paciente del elemento de sujecin.
En los relevos debe el operario saliente indicar sus impresiones al entrante
sobre el estado de la gra y anotarlo en un libro de incidencias que se guardar.
Los interruptores no deben presionarse jams con algn objeto que no sea la
mano del operario.
Obligaciones Diarias Del Operador.
Comprobar el funcionamiento de los botones del panel de control, as como
los frenos delanteros de las llantas.
Observar la normalidad de funcionamiento de la gra, solo si se perciben
ruidos o calentamientos anormales.
Verificar la tensin del cable de acero.
Comprobar el buen funcionamiento del arns.
Se deben probar las protecciones contra sobrecargas, interruptores fin de
carrera, mecanismo de elevacin, izado y descenso.
Vigilar las partes sujetas a desgaste, como cojinetes, superficies de los
rodillos, engranajes, poleas, etc., debiendo avisar para su cambio en caso de
ser necesario.
Sistemas De Seguridad.
Los sistemas de seguridad de que debe dispone la gra son:
Limitador de fin de carrera de elevacin.
Frenos en las rodajas delanteras de la gra.
Sistema Elctrico.
Preservar las partes activas de cualquier contacto con el agua.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 71 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Conservar en buen estado todos los cables de conexin.
Evitar cambios bruscos de rotacin en el sentido de giro del motor.
Todos los contactos del circuito de control deben mantenerse limpios y
protegidos adecuadamente.
Comprobar al funcionamiento correcto de los interruptores.
Elementos Mecnicos.
Revisin peridica de la estructura.
El cable de suspensin debe ser revisado peridicamente observando que no
tengan torceduras, aplastamientos, exceso de hilos rotos, etc.
Revisar tambin los amarres.
Comprobar nivel de aceite en la caja reductora y sustituirlo con la
periodicidad que indique el fabricante.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 72 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
CAPTULO
3
EN STE CAPTULO SE TRATARN LOS CLCULOS DE LOS
DIVERSOS ELEMENTOS CON LOS QUE CUENTA LA GRA FIJA
Y LA GRA MOVIL.
CON STOS CLCULOS SE ESCOGER EL MATERIAL MS
APROPIADO, ASI COMO SUS DIMENSIONES ERGONMICAS
PARA QUE LAS GRAS QUEDEN ESTRUCTURADAS Y
CALCULADAS, DE ACUERDO A LOS REQUERIMIENTOS DEL
CENTRO DDE REHABILITACIN INFANTIL TELETN.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 73 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INTRODUCIION:
Al pensar en todas las discapacidades y las limitantes que se tienen en el centro
de rehabilitacin se decidi disear y realizar un sistema de gras, las cuales
den un mejor aprovechamiento de las instalaciones y as se pueda ascender a
ms pacientes con la misma calidad.
Por las diversas funcionalidades, se pens hacer una gra fija, la cual estar
montada en el extremo de la piscina. Hay que tomar en cuenta que la piscina en
este centro se encuentra por arriba del nivel del piso lo cual dificulta el acceso
de los pacientes obligando a los familiares a cargarlos para su ingreso,
representando esto un riesgo latente se desea realizar este ingreso de manera
semiautomtica, evitando as que el paciente, su familiar y el terapista lleguen a
tener algn imprevisto. El sistema de gras fijas constar de una gra tipo
bandera de aproximadamente de 3m. El cual contar con un aditamento de
soporte blando para sujetar a la persona, el asiento flexible se montara en el
cuerpo de la persona previamente, el paciente arribara en camilla con silla de
ruedas al lugar donde este montada la gra se sujetara el asiento a la gra y
con un sistema de izaje se levantara lentamente a la persona hasta conseguir la
altura adecuada, se girara la bandera de la gra y posteriormente se bajara a la
persona lentamente depositndola en la piscina lista para que ya sea un
familiar o un terapista suelte el asiento flexible liberando ala persona dejando
ala gra lista para trasladar a otro paciente lo que se busca con esta gra es
eficientar y disminuir el tiempo de ingreso de las personas a la piscina al igual
que aumentar la seguridad de todos los usuarios de la piscina.
Esta gra tambin es til para un desalojo rpido y eficaz de la piscina y todos
sus usuarios.
Pero no solamente se desea ayudar al ingreso de las personas de la piscina. El
centro de rehabilitacin cuenta con diversas tinas las cuales son altas y
estrechas, diseadas nicamente, para una persona ya sea acostada o semi-
acostada. El problema de este tipo de tinas es que debido a la altura es difcil
acceder a los pacientes en esta, teniendo como consecuencia que no se utilizan
con la frecuencia requerida. Es de vital importancia y prioridad para el centro
contar con un sistema capaz de adaptarse a los diferentes modelos de tinas con
los que se encuentran que sea econmico y transportable.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 74 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
De aqu surgen la idea de disear una gra mvil, la cual cuenta con un
sistema semi automtica de izaje, que no requiera un contacto ni energa
permanente, que sea ligera, resistente y que cumpla con el objetivo de
introducir a los pacientes en las estrechas tinas sin lastimarlos o tensarlos, la
gra mvil propuesta es tipo bandera, la cual estar soportada por u sistema de
ruedas, que permitan trasladar a cualquier lugar del centro.
Por su diseo la gra proporcionara estabilidad al paciente a la hora de la
traslacin o el izaje por medio de movimientos lentos y suaves, lo cual ayudara
a que los pacientes no se preocupen y tensen mediante el recorrido o izaje. Se
disea con un sistema de cables que tiene dos puntos de sujecin lo cual
solucionara el problema de tambaleo o inestabilidad.
Debido a que en el centro se cuenta con una diversidad muy grande de
pacientes se tomo en cuenta que muchos de ellos no pueda permanecer
sentados por ellos mismos o no se puedan sentar; por lo cual se disearon dos
tipos de accesorios los cuales uno es para personas que se puedan sentar, este
consta con asiento flexible el cual ser colocado previamente en el cuerpo del
paciente este se sujetara a la gra para su traslado y su posterior liberacin.
El otro tipo de asiento que es para aquella persona que no pueden o se lastiman
al sentarse es un accesorio tipo mamilla el cual estar sujeto de 6 puntos para
tener la estabilidad requerida.
Con esta gra se pretende emplear el uso de los diversas tinas de hidroterapia
del rea de rehabilitacin ya que no se usan frecuentemente como es necesario
debido a los problemas de acceso y desalojo de los pacientes; problemas que
quedan automticamente resueltos con la implementacin de esa gra.
Para realizar estas gras descritas anteriormente se tienen los siguientes
clculos; los cuales nos soportan para la realizacin de las gras ya que, con
stos se seleccionaron los materiales ms adecuados para aplicacin.
Empezaremos con la Gra Fija. Por el mtodo de tanteo para seleccionar el tubo
estructural se tiene que:
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 75 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
DIBUJO 3.1 GRA FIJA PROPUESTA
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 76 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
CALCULO DE LA GRA FIJA (COLUMNA).
DIAGRAMA DE CUERPO LIBRE
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 77 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Seleccionando de la tabla H de propiedades de tubos un dimetro de 5 pulgadas.
Tenemos los siguientes datos:
Dimetro exterior (de)= 0.1413m
Dimetro interior (di)= 0.1281m
rea (A)=0.0027741m2
Radio de giro (r)= 0.047752m
le = 2l
le = 2(3m ) = 6 m
kg
2 2 20.3848 x10 9 2
2 E 2
m
Cc = = = 161.1210
c 6
15.5 x10 2
kg
m
l
40 Columna Corta
k
l
Calculando la relacin de esbeltez Cc > Columna Intermedia
k
l
Cc Columna L arg a
k
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 78 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
le 6m
= = 125 .65
r 0.04775 m
Se tiene que:
le
Cc
r
Por lo que es una columna intermedia.
Se calcula el factor de seguridad.
3
l l
5 3
F .S . = + k 3
k
3 8 Cc 8Cc
5 3 125.65 (125.65)
3
F .S . = + = 2.76
3 8 161.12 8(161.12 )3
(125.65)2 15.5x106 kg
1 2
2(161.12) m2 kg
adm = = 3.90 x106 2
2.76 m
Analizando por columna excntrica.
P Mc
= +
A I
(de 4 di 4 ) (0.14134 0.12814 )
I= = = 6.3496x10 6 m 4
64 64
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 79 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
=
150 kg
+
(224 .4kg m )(0.07065 m ) = 2.55 x10 6 kg
0.002774 m 2
6.3496 x10 6 m 4 m2
Comparando adm contra el aplicado
adm aplicado
Se cumple la condicin con el tubo que seleccionamos.
CALCULO DE LA GRA FIJA (BRAZO)
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 80 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
1.5m
150 Kg
Tomando los siguientes datos:
kg
E= 20.384x109
m2
kg
= 15.5 x10 6 (trabajando el acero 1010 al 50%)
m2
Anlisis por rigidez.
S=
M
S =
M
=
(150 kg )(1.5m ) = 1.45 x10 5 m 3
15.5 x10 6
kg
m2
convirtiendolo a pulgdas3 tenemos que S= 0.8858in3
Usando las tablas H de propiedades de tubos, buscamos un dimetro que nos satisfaga
nuestro valor de S, y encontramos que el mnimo es de 2.5 pulg. de dimetro.
Con los siguientes datos:
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 81 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Datos de tabla (in) Datos en (m)
Diam. Nominal = 2.5in..............0.0635m
Diam. Exterior = 2.875in...........0.073025m
Diam. Interior = 2.499in............0.062712m
S =1.06in3.................................1.7370x10-5m3
I = 1.53in4.................................6.3683x10-7m4
r = 0.947in.................................0.02405m
e = 0.203in................................0.005156m
A = 1.70in2................................0.0010967m2
Analisis por resistencia
Fl 3
Y max =
3EI
Y max =
(150kg )(1.5m )3 = 5.77 x10 3 m
kg
(
3 20.384 x10 9 2 6.3683 x10 7 m 4 )
m
Nota:
Redondeando este valor es aproximadamente 6mm, pero con este dimetro. Se
pretende realizar toda la gra fija del mismo diametro de tubo; y como la columna
necesita de 5 pulgadas, con este diametro de trabajara. Es por esto que esta
deformacin se desprecia, ya que se reducir al aumentar el diametro de brazo.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 82 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
TORNILOS PARA LA BASE DE LA GRA FIJA
Clculo de los tornillos de la base de la gra fija:
Por resistencia
(0.5) 2
A = = 0.1963 m 2
4
F
P =
A
150
P = = 763.98 Kg / m 2
0.1963
763.98
F = = 190.99 Kg / m 2
4
(490.99) 4
=
d2
4 (190.99)
d =
(8.43 10 6 )
d = 5.36 10 3 m 5.36 mm
Por Rigidez
P L 763.98 (0.0664) 4
= =
A E (0.00536) 2 (2.10 1010 )
= 1.24 10 4 m 0.122 mm
Por ergonoma se decide poner tornillos de 0.5=12.7mm de dimetro
763.98 (0.0762)
=
(0.027) 2 ( 2.10 x1010 )
= 5.45 10 3 m 5.44 10 3 mm
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 83 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Clculos de la gra mvil
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 84 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
1m
150 Kg
DIBUJO 3.5 Y 3.6 PARTE A CALCULAR DE LA GRA MVIL Y SU REPRESENTACIN PARA SU CLCULO.
CALCULO DEL SOPORTE (ELEMENTO 1)
Tomando en cuenta los siguientes datos de la tabla H de propiedades de tubos:
Tubo con dimetro de 1 in con :
S= 0.326in3____________5.342x10-6m3
I= 0.310in4_____________1.2903x10-7m4
A=0.799in2____________0.0005154m2
r= 0.623in_____________0.0158m
e= 0.145in
Dimetro interior = 1.610in
Dimetro exterior = 1.9in
M 150kg (0.5m )
S= = = 4.828 X 10 6 m 3
15.5 X 10 6 kg / cm 2
S = 0.295in3
Segn la tabla H de tubos.
Se escoge un dimetro de 1 in con una S = 0.326in3
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 85 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
150kg (0.5m )
3
Y max =
( )(
3 20.384 X 109 kg / m 2 1.2903 X 10 7 m 4 )
Y max = 2.3762 X 10 3 m = 2.5mm
CALCULO DEL SOPORTE (ELEMENTO 2)
DIBUJO 3.9 Y 3.10 PARTE DE LA GRUA MVIL A CALCULAR Y SU DETALLE
Usando el dimetro de 2 in
Con los siguientes datos (de la tabla H):
S= 1.06in3 1.7370x10-5m3
A= 1.7in2 0.0010967m2
r= 0.947in 0.02405m
I= 1.53in4 6.368x10-7m4
Por Crculo de Mohr
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 86 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
150 kg
Mt = 0.5 m = 37.5 kgm
2
Por flexin
16 37.5 kgm 0.073 m
max = = 1077.163.33 1.08 x 10 6 kg / m 2
4
0.073 m (0.0627 )4
Por torsin
150 kg
2 0.3 m
= = 1295336.78 1.3 x 10 6 kg / m 2
1.7370 x 10 5 m 3
Por lo tanto tenemos la siguiente partcula:
1.08x106kg/m
2
1.3x106kg/m2
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 87 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
1.3 x 10 6 + 0
c = , 0
2
c = 0.65 x 10 6 , 0
2
2
1.3 x 10 6 + 0
R = + 1.08 x 10 6
2
R = 1260515.767 1.261 x 10 6 max
Calculando los esfuerzos principales tenemos:
p1 = 0.65 x 10 6 + 1.26 x 10 6
p1 = 1.911 x 10 6 kg / m 2
p 2 = 0.65 x 10 6 1.26 x 10 6
p 2 = 0.611 x 10 6 kg / m 2
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 88 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Comparando los esfuerzos cortantes tenemos que:
Z max= 1.261x106 < Z admisible= 7.75x106
Es aceptable
CALCULOS COLUMNA (ELEMENTO 3)
DIBUJO 3.7 Y 3.8 REPRESENTACIN DE LA PARTE DE LA GRA A CALCULAR Y SU DIAGRAMA PARA SU CLCULO
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 89 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Diagrama de cuerpo libre.
Mp = P (d)
Mp = 150 (0.5)
Mp = 75 Kgm
Mc = P1 (d1)
Mc = 5 (0.12)
Mc = 0.6 kgm
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 90 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Seleccionando de la tabla H (propiedades de tubos), un tubo de 2 pulgadas de
dimetro para su anlisis.
Con los siguientes datos:
Diam. Ext.(de) = 0.073m
Diam. Int.(di) = 0.0627m
rea (A)= 0.0010967m2
Radio de giro (r) = 0.02405m
I = 6.368 x 10-7 m4
E = 20.3848 x 109 kg/m2 (caracterstica del material)
Tomando un factor del 50%
kg kg
c = 1550 cm 2 = 15.5 x 106 m 2
Calculando la longitud efectiva (le) considerando un extremo empotrado y el otro libre.
le = 2l
le = 2 (1.80m)
le = 3.6m
Calculando Cc (valor particular)
kg
2 2 20.3848 x10 9 2
2 E 2
m
Cc = = = 161.1210
c 6 kg
15.5 x10 2
m
l
40 Columna Corta
k
l
Calculando la relacin de esbeltez Cc > Columna Intermedia
k
l
Cc Columna L arg a
k
le 3.6m
= = 149.68
r 0.02405m
le
Comparando Cc y se deduce que:
r
Cc = 161.12
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 91 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
le
=149.68
r
le
Comparando, tenemos que: Cc >
r
Por lo tanto, se tiene una columna intermedia
Aplicando la frmula de la AISC para columna intermedia
l 2
1 k
2Cc 2 Y
adm =
F .S .
Determinando el factor de seguridad para el caso de columna intermedia
3
l l
5 3 k k
F .S . = +
3 8 Cc 8Cc 3
5 3 149.68 (149.68)
3
F .S . = + = 1.9148
3 8 161.12 8(161.12)3
(149.68)2 15.5 x10 6 kg
1 2
2(161.12 ) m2 kg
adm = = 4.60 x10 6 2
1.9148 m
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 92 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Analizando por columna excntrica.
P Mc
= +
A I
(de 4 di 4 ) (0.0734 0.062714 )
I= = = 6.3486 x10 7 m 4
64 64
=
150kg
+
(74.4kg m )(0.0365m ) = 4.4142 x10 6 kg
0.0010967m 2
6.3486 x10 7 m 4 m2
Comparando adm contra el aplicado
adm aplicado
Se cumple la condicin con el tubo que seleccionamos.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 93 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Clculos de la Gra Mvil (BASE)
Claro 1 y 2
M 1l1 + 2 M 2 (l1 + l2 ) + M 3l2 + 1 1 + 2 2 = 0
6A a 6A b
ec. a
l1 l2
Claro 2 y 3
M 2 l 2 + 2M 3 (l 2 + l3 ) + M 4 l3 + 2 2 + 3 3 = 0
6A a 6A b
ec. b
l2 l3
6 A1 a1
=0
l1
150(0.2)
6 A2 b2 Pb 2
l2
=
L
(
L b2 = )0.4
(
0.4 2 0.2 2 = 9 )
150(0.2)
6 A2 a2 Pa 2
l2
=
L
(
L a2 = )
0.4
(
0.4 2 0.2 2 = 9 )
6 A3 b3
=0
l3
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 94 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
*Tomado de la tabla 8-1, pgina 256 del Libro de Resistencia de Materiales, ver anexo.
Nota: De acuerdo a la definicin de momento flexionante M1 y M4 son nulos, por lo que
se tiene un sistema con dos incgnitas.
Sustituyendo en ec. a y ec. b
M 1 (0.2) + 2 M 2 (0.2 + 0.4) + M 3 (0.4) + 0 + 9 = 0
0.2M 1 + 1.2 M 2 + 0.4M 3 + 9 = 0
1.2 M 2 + 0.4M 3 + 9 = 0...............ec.1
M 2 (0.4) + 2 M 3 (0.4 + 0.2) + M 4 l3 + 9 + 0 = 0
0.4M 2 + 1.2M 3 + 9 = 0
0.4M 2 + 1.2M 3 + 9 = 0...............ec.2
Comprobacin de reacciones.
[M ( M ) izq ]
2=
Aplicando la definicin de momento flexionante se puede expresar M2 en funcin de las
fuerzas a la izquierda de la seccin R2.
M 2 = 5.62 = 0.2 R1
M 2 = 5.62 = 0.2 R1
R1 = 28.1Kg
Para determinar R2 se expresa el M3 en funcin de las fuerzas a la izquierda de R3
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 95 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
[M ( M ) izq]
3=
M 3 = 5.62 = 0.6 R1 + 0.4 R2 150(0.2)
sustituyendo R1
M 3 = 5.62 = 0.6( 28.1) + 0.4 R2 30
= 5.62 + 16.86 + 30 = 0.4 R2
= 41.24 = 0.4 R2
R2 = 103.1kg
El valor de R4 se obtiene a partir de M3, pero expresado en funcin de las fuerzas a la
derecha de R3, es decir:
[M ( M ) der ]
2=
5.62 = 0.2 R4
R4 = 28.1kg
Mediante la condicin de equilibrio de las fuerzas verticales aplicada a toda la viga, se
deduce:
Y = 0
R1 + R2 + R3 + R4 = 150kg
28.1 + 103.1 + R3 28.1 = 150kg
46.9 + R3 = 150
R3 = 150 46.9
R3 = 103.1kg
Despejando M2 de la ecuacin 1
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 96 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
1.2 M 2 + 0.4M 3 + 9 = 0...............ec.1
1.2 M 2 = 0.4M 3 9
0.4 M 3 9
M2 =
1.2
Sustituyendo en la ecuacin 2
0 .4 M 2 + 1 .2 M 3 + 9 = 0
0 .4 M 3 9
0 .4 + 1 .2 M 3 + 9 = 0
1 .2
0.13333M 3 3 + 1.2 M 3 + 9 = 0
M 3 [ 0.13333 + 1.2] 3 + 9 = 0
6
1.0666 M 3 + 6 = 0 M3 = = 5.62kg m
1.0666
Sustituyendo M3 en la ecuacin 1
1.2 M 2 + 0.4( 5.62 ) + 9 = 0
1.2 M 2 + 6.752 = 0
6.752
M2 = = 5.62kg m
1 .2
Nota: Las reacciones se calculan con el fin de trazar el diagrama de fuerzas cortantes.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 97 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
MM Mm
R11 =
L
5 . 62 0
R11 = = 28.1
0 .2
5.62 5.62
R21 = =0
0 .4
5.62 0
R31 = = 28.1
0 .2
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 98 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
DIAGRAMA DE CORTANTES
VA= -28.1
VB= -28.1
VA`=-28.1+103.1=75
VB`= 75-150= -75
VC= -75+103=28.1
VC`= -28.1
DIAGRAMA DE MOMENTOS FLEXIONANTES
Se tiene que:
MB = RA l
MB = 28.1 (0.2)= 5.62
ME = 75(0.2)= 15
MC = 28.1 (0.2)= 5.63
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 99 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
DIBUJO 3.13 REPRESENTACIN DE LA PARTE A CALCULAR DE LA GRA MVIL
ELEMENTO A TORSIN-FLEXIN (base)
0.5m
150kg
M=75kgm dividido entre
dos apoyos en su
condicin ms crtica
tenemos que:
DE ESTE ELEMENTO ANALIZADO TENEMOS LOS SIGUIENTES MOMENTOS
MXIMOS:
M TORSIN =15kgm
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 100 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
M FLEXIN =9.375kg-m
Con estos datos podemos trabajar en nuestra partcula para el crculo de Mohr.
CIRCULO DE MOHR 2
Por flexin
16 9.375 kgm 0.073 m
max = = 269290.83 0.27 x 10 6 kg / m 2
4
4
0.073 m 0.0627
Por torsin
37.5 kgm
= 5 3
= 2158894.64 2.16 x 10 6 kg / m 2
1.7370 x10 m
0.27x106kg/m2
2.16X106kg/m2
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 101 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
2.16 x 10 + 0
6
c = , 0
2
c = 1.08 x 10 6 , 0
2
2
2.16 x 10 + 0
6
R = + 0.27 x 10 6
2
R = 1.1132 x 10 6 max
Calculando los esfuerzos principales:
p1 = 1.08 x 10 6 + 1.1132 x 10 6
p1 = 2.1932 x 10 6 kg / m 2
p 2 = 1.08 x 10 6 1.1132 x 10 6
p 2 = 0.0332 x 10 6 kg / m 2
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 102 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Al comparar el cortante admisible con el cortante mximo, tenemos que:
Zmax= 1.1132x106kg/m2 < Zadm= 7.75x106kg/m2
ES ACEPTABLE
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 103 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
CALCULO DEL ELEMENTO 5 Y 6.
0.5m
150k
0.4m
1m
R1 R2
150 kg
W = = 75 kg
2
75 kg 1 m
R1 = = 53.5714 kg
1.4 m
R 2 = 75 kg 53.5714 kg = 21.4285 kg
Anlisis de la reaccin 1
1m
R1
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 104 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
M1 = R1(1m)
M1=53.5714kgm
M1 M1 5357.14 kg cm
1 = ; S1 = = = 3.4562 cm 3
S1 1
1550 kg / cm 2
S1 = 0.2109 in 3
Segn estos resultados elegimos de la tabla H de tubos un dimetro de 1
in con una S = 0.235in3 que cumple con lo que requerimos.
Anlisis de la reaccin 2
0.4m
R2
M2= R2(0.4m)
M2=21.4285kg (0.4m)
M2= 8.5714kgm
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 105 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
M2 M2 857.14 kg cm
2 = ; S2 = = = 0.5529 cm 3
S2 2
1550 kg / cm 2
S 2 = 0.03374 in 3
Segn estos resultados elegimos de la tabla H de tubos un dimetro de in con
una S = 0.41 in3 que cumple con lo que requerimos.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 106 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
A continuacin se mostraran los dibujos de la gra mvil.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 107 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 108 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 109 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 110 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 111 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 112 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 113 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 114 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 115 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 116 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 117 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 118 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 119 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 120 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 121 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INDICACIONES DE LAS DIMENSIONES DEL TAMBOR PROPUESTAS DEL
LIBRO FORMULARIO DE MECANICA, VER ANEXO 2.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 122 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Diagrama Electrico.
Donde:
L = LINEA DEL CIRCUITO A 127V
N = NEUTRO DEL CIRCUITO A 127V
A1 = RELEVADOR QUE ACTIVA LA BOBINA A1
A2 = RELEVADOR QUE ACTIVA LA BOBINA A2
IZQ = RELEVADOR DE GIRO A LA IZQUIERDA
DER = RELEVADOR DE GIRO A LA DERECHO
BAR = BOTN ARRIBA
BAB = BOTN ABAJO
BP = BOTN DE PARO
FUSIBLES = A 250V 6.3
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 123 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
MODIFICACIONES PROPUESTAS POR EL TELETN
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 124 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
CAPTULO
4
EN STE CAPTULO SE ESPECIFICARN LOS DETALLES DE
LOS MATERIALES UTILIZADOS EN LA ELABORACIN DE LAS
GRAS MECNICAS PARA DISCAPACITADOS.
1.-SE ESTUDIA ECONMICAMENTE LA GRA FIJA PARA
DISCAPACITADOS.
2.-SE ESTUDIA ECONMICAMENTE LA GRA MVIL PARA
DISCAPACITADOS.
3.-SE HACE UN COMPENDIO Y UNA COMPARACIN DE
VENTAJAS Y DESVENTAJAS DE LAS DOS GRAS PROPUESTAS
CON LAS QUE ACTUALMENTE EXISTEN EN EL MERCADO.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 125 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Primera Parte
En esta primera parte se analizarn los costos unitarios de los componentes
que integran la gra fija propuesta en este prototipo.
Se empezarn analizando los costos directos de cada parte. Estos son el costo
implicado en la compra del material utilizado para la construccin de la gra.
Gra Fija
PARTIADA MATERIAL CANTIDAD UNIDAD Kg-M PRECIO TOTAL
UNITARIO
1 TUBO 2.5 3 METRO 4 $19.00 $228.00
CED.30
2 TUBO 2.5 1.5 METRO 4 $19.00 $114.00
CED.30
3 RODAMIENTO NA PZA NA $154.80 $154.80
SEGUIDOR
CF-H 2.5
4 TORNILLO x 4 PZA NA $7.00 $28.00
4 NC
5 PLACA 1 PZA NA $500.00 $500.00
CIRCULAR DE
ACERO DE
19.68 x 2
6 TAQUETE DE 4 PZA NA $50.00 $250.00
EXPANSIN DE
x 2
7 RONDANA DE 4 PZA NA $1.00 $4.00
PRESIN DE
8 RONDANA 4 PZA NA $0.55 $2.20
PLANA DE
9 CABLE DE 10 METRO NA $12.00 $120.00
ACERO DE 1/8
10 POLEA DE 3 PZA NA $25 $75
ALUMINIO DE
2.5
11 CASQUILLO 6 PZA NA $4.60 $27.60
PARA CABLE DE
1/8
12 GUARDACABO 1 PZA NA $6.00 $6.00
13 TOPE 1 PZA NA $1.70 $1.70
14 MOTOR C.A. 1 PZA NA $1570.00 $1570.00
HP A 850 RPM
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 126 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
PARTIADA MATERIAL CANTIDAD UNIDAD Kg-M PRECIO TOTAL
UNITARIO
15 TAMBOR 1 PZA NA $850.00 $850
MAQUINADO
16 SISTEMA DE 1 PZA NA $500.00 $500
CONTROL
17 REDUCTOR DE 1 PZA NA $3200.00 $3200.00
VELOCIDAD
RELACIN
170:1
18 BASE PARA 1 PZA NA $300 $300
REDUCTOR
19 COPLE 1 PZA NA $250 $250
FLEXIBLE
20 ARNES 1 PZA NA $300.00 $300.00
21 SOLDADURA 0.5 KG NA $300.00 $150.00
TOTAL $8593.30
DIBUJO 3.1 GRA FIJA PROPUESTA
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 127 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Segunda Parte
Gra Mvil
PARTIDA MATERIAL CANTIDAD UNIDAD KG-M COSTO TOTAL
UNITARIO
1 TUBO 3.5 CED.30 0.5 x 2 METRO 6 $19.00 $114.00
3 TUBO 3.5 CED. 30 0.6 METRO 6 $19.00 $68.40
4 TUBO 3.5 CED. 30 1.9 METRO 6 $19.00 $216.00
5 TUBO 3.5 CED. 30 1x2 METRO 6 $19.00 $228.00
7 TUBO 3.5 CED. 30 0.8 METRO 6 $19.00 $91.20
8 TUBO 3.5 CED. 30 0.40 x 2 METRO 6 $19.00 $91.20
10 TUBO 1.5 CED. 30 0.40 x 2 METRO 4 $19.00 $91.20
12 TUBO 1.5 CED. 30 0.25 x 2 METRO 4 $19.00 $38.00
14 TUBO 1.5 CED. 30 0.15 x 15 METRO 4 $19.00 $22.80
16 RODAJA FIJA DE 2 PZA NA $85.00 $170.00
POLIETILENO DE
4.5 x 1.5
17 RODAJA 2 PZA NA $95.00 $190.00
GIRATORIA DE
POLIETILENO DE
4.5 x 1.5 CON
FRENO
18 CABLE DE ACERO 10 METROS NA $12.00 $120.00
DE 1/
8 6 x 7 x
19 POLEAS DE 6 PZA NA $25.00 $150.00
ALUMINIO DE 2.5
20 TAMBOR 1 PZA NA $11.00 $1100.00
MAQUINADO
21 MOTOR DE CD DE 1 PZA NA $4000.00 $4000.00
HP
22 ACUMULADOR 12 1 PZA NA $460.00 $460.00
V 330
23 CARGADOR PARA 1 PZA NA $580.00 $580.00
ACUMULADOR
24 SISTEMA DE 1 PZA NA $1000.00 $1000.00
CONTROL
25 GUARDACABOS 1 PZA NA $6.00 $6.00
26 CASQUILLOS 5 PZA NA 4.60 $23.00
27 TOPES 5 PZA NA 1.70 $8.50
28 SISTEMA 1 PZA NA $500 $500.00
ANTIGIRO
29 ARNES 1 PZA NA $300 $300.00
30 ESTRUCTURA 1 PZA NA $200 $200.00
PARA MONTAJE
DE MOTOR
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 128 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
PARTIDA MATERIAL CANTIDAD UNIDAD KG-M COSTO TOTAL
UNITARIO
31 ESTRUCTURA 1 PZA NA $100.00 $100.00
PARA MONTAJE
DE ACUMULADOR
33 LOTE DE 1 LOTE NA $120.00 $120.00
TORNILLERIA
34 SOLDADURA 30- 1 KG NA $300.00 $300.00
48
TOTAL $10437.90
3.4 GRA MOVIL PROPUESTA
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 129 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Costos de fabricacin
Para la realizacin de las gras es necesario tomar en cuenta los gastos por
mano de obra.
Se estima que para realizar la gra fja una pareja (maestro y su ayudante)
demorarn 3 das el salario de la pareja actualmente es de $540.00 M.N., por lo
que en gastos por mano de obra para el maquinado y ensamble de la gra fija
asciende a $ 1620.00 M.N.
As mismo para la realizacin de la gra mvil para discapacitados, se estima
que una pareja realizar la pailera en 5 das por lo cual el costo por maquinado
y ensamble ser de $2700.00 M.N.
Por la utilizacin de maquinaria y herramienta, se debe cobrar un porcentaje de
el costo total de materiales, esto es para mantenimiento, compra de
herramienta nueva y consumibles como son brocas, lijas, limas, seguetas, etc.
El porcentaje decidido para la gra fija, se decidi de un 10%.
Por lo cual el costo por el uso de herramienta y equipo es de 859.30 M.N.
El porcentaje para la gra mvil se decidi que fuera de un 12%.
Por lo cual el costo por el uso de herramienta y equipo es de $2283.71 M.N.
La sumatoria de los gastos directos para la gra fija es de $ 11072.6 M.N.
La sumatoria de los gastos directos para la gra mvil son de $ 15837.90 M.N.
Tomando en cuenta los costos indirectos, en estos se incluyen, servicio de luz,
servicio de agua, papelera, gastos administrativos, dibujantes y costo de
ingeniera se tiene que:
Para La Gra Fija:
Diversos servicios (agua, luz, telfono renta del local, etc): $500
Dibujante: $334.00
Ingeniera: $1300.00
Gastos de distribucin: $300.00
Total de costos indirectos: $ 1934.00
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 130 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Para la gra mvil:
Diversos servicios (agua, luz, telrfono, renta del local, etc): $700
Dibujante: $ 667.00
Ingeniera: $2666.66
Gastos de distribucin: $300.00
Total de costos indirectos: $4333.60
Por lo cual el costo total de la gra fija es de: $13,006.60 M.N.
El costo total de la gra mvil es de: $ 20,171.50
De las gras se planea tener una utilidad del 18% y de VEA (valor econmico
agregado) del 10% por lo cual el precio de venta al pblico ser de:
GRA FIJA: $15347.80 M.N.
GRA MVIL: $23802.37M.N
E
Por ultima parte del captulo se recopil informacin de las diversas gras que
existen en el mercado actualmente y se compararon en forma muy general a la
propuesta en sta tesis.
Las gras que actualmente existen en el mercado son para pacientes
discapacitados, los cuales no se pueden trasladar por ellos mismos. Las gras
no cuentan con un desarrollo de izaje superior a los 0.5 metros, situacin
superada por la gra propuesta.
Hay que tomar en cuenta que las gras presentadas, su objetivo es trasladar a
la persona discapacitada de una silla de ruedas hacia una cama o otro medio de
estancia; sin en cambio las gras presentadas en sta tesis son para propsito
especfico como se trato en un principio. Son para introducir a pacientes con
discapacidades en diversas tinas de hidromasaje para recibir la atencin
adecuada.
Dentro de las cotizaciones realizadas se encontr que en Mxico no existe otra
gra fija en el mercado; por lo cual sera, la gra fija propuesta, uno de los
primeros intentos mexicanos de incursionar econmicamente en ste rublo.
A continuacin se presentan una lista de precios de diversas gras as como
algunas de sus caractersticas.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 131 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
NOTA: No se encontr tampoco una gra bastante parecida a la gra mvil
propuesta, pero sin en cambio las cotizaciones mostradas son de gras las
cuales se diferencian por la energa empleada y su parecido con la gra
propuesta en ste trabajo es en ms de un 60%.
Lista de precios de algunas gruas existentes
TIPO DE GRA COSTO EN PESOS MS IVA
ELEVADOR DE PACIENTES
HIDRAULICO
SOPORTA HASTA 130 KG $ 14.931.00
ELEVADOR DE PACIENTES
HIDRAULICO
SOPORTA HASTA 150 KG $ 16,569.00
ELEVADOR DE PACIENTES
HIDRAULICO
SOPORTA HASTA 175 KG $ 18,585.00
ELEVADOR DE PACIENTES
ELECTRICO $ 28,676.00
SOPORTA HASTA 130 KG
EN EL ANEXO 2, DONDE SE TIENEN LAS TABLAS Y DEMS INFORMACIN
SE PUEDE VER QUE TIPO DE GRA ES CONTRA LA QUE SE COMPITE.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 132 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Si se comparan los costos de la gra propuesta y las tres primeras, lgicamente
estaramos fuera del mercado, pero estas gras son manuales, y funcionan
como un gato hidrulico, por lo cual a veces resultan engorrosas y cansadas de
utilizar, ya que hay que estar bombeando el aceite hacia el depsito para que
resulte en un desplazamiento del paciente.
La cuarta y ltima gra presentada presenta una mayor similitud entre sta y
la propuesta, pero sta rebasa el presupuesto mostrado, tambin en sta parte
del trabajo, por lo cual, consideramos nosotros, que se est dentro del mercado,
adems que se ve muy factible su comercializacin.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 133 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
CONCLUSIONES
Este trabajo es la culminacin de una carrera, por tal motivo es obligatorio para
cada uno de nosotros el terminarla de una forma digna y con orgullo, dando el
mximo esfuerzo.
A diferencia de los dems compaeros, decidimos realizar nuestro tema de tesis
en el campo de la rehabilitacin; y no en el rea industrial. Esto fue por el
siguiente motivo, desebamos devolver a la sociedad la oportunidad que
tuvimos de terminar una ingeniera en este pas.
Durante este proyecto aprendimos muchas cosas, pero una de las ms
importantes, si no la principal, fue que al aplicar nuestros conocimientos
podemos solucionar problemas que afectan a la sociedad. En este caso en
particular, la idea era apoyar a una institucin que se ayuda a los nios
discapacitados como es el TELETN.
En base a sus necesidades se presentaron una serie de diseos de gras para
transportar a sus pacientes en las salas de hidroterapia y mecanoterapia.
Aqu surgi una dificultad para nosotros, ya que no estbamos en nuestro
campo, tuvimos que tomar en consideracin otros puntos como: ergonoma,
comodidad, buen trato al paciente, seguridad del mismo al trasladarlo, entre
otros.
Para sacar adelante este trabajo pasamos por varias dificultades pero al final
logramos nuestro cometido.
Una de tantas con las que nos topamos, fue que vimos la realidad fuera de la
escuela; es un mundo totalmente diferente pero contamos con las bases slidas
para afrontarlo como ingenieros de la Escuela de Ingeniera Mecnica y
Elctrica Azcapotzalco.
Por medio de este proyecto hemos aplicado los conocimientos adquiridos en el
transcurso de nuestra carrera, tanto terico como practico, obteniendo con esto una
valiosa experiencia en el desarrollo tecnolgico.
Con la terminacin de nuestro proyecto, nos dimos cuenta, de la importancia que tiene
la educacin para el desarrollo del hombre como es en lo social y tecnolgico, ya que en
la actualidad, la creciente demanda del mundo por formar gente preparada para
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 134 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
enfrentar los nuevos retos, ha motivado al ser humano a sobrepasar sus fronteras
naturales llevndolo a innovar, crear y construir nuevos logros.
Debemos de estar concientes que todos vivimos en un mismo medio y tenemos que
trabajar juntos para lograr un bienestar comn ya que cualquier actividad para beneficio
de la humanidad nos ha demostrado que engrandece al hombre.
Por otra parte, con lo que respecta a las personas discapacitadas. Si se analizan los 2
grupos principales de discapacidad en cuanto a su adquisicin estn;
a) Quienes nacen con ella y
b) Quienes la adquieren.
En ello existen diferencias pues en el nivel (b) en muchos casos son profesionales
egresados de universidades, escuelas normales, etc. que tienen el suficiente dominio
mental en su rea y que inician el proceso de aprender a autoaceptarse con su
discapacidad y se encuentran con limitantes de desarrollo tales como los requisitos
departamentales, primer "pero" al que se enfrentan y no se les contrata porque el
lineamiento o estatuto as lo, estipula.
"Eliminar barreras discriminatorias"
Las personas que poseen una discapacidad, se enfrentan a grandes barreras y una de
stas es la del "hombre contra el mismo hombre"; ya que la deshumanizacin y el
sentido de productividad en serie y dems, genera como consecuencia la falta de
valorizacin y la falta de valores morales formativos en el seno familiar.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 135 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
BIBLIOGRAFA
FORMULARIO DE MECNICA
L. PARETO
CEAC
RESISTENCIA DE MATERIALES APLICADA
ROBERT L. MOTT
EDIT. PRENTICE HALL.
MECNICA DE MATERIALES
RILEY, STURGES Y MORRIS
EDIT. LIMUSA WILEY
MECNICA ANALTICA PARA INGENIEROS
SEELY ENSIGN
EDIT. UTEHA INGENIERIA
MATERIALES PARA INGENIERA
VAN VLACK
EDIT. C.E.C.S.A.
DIBUJO INDUSTRIAL
A. CHEVALIER
EDIT. LIMUSA-NORIEGA EDITORES
ALTOS HORNOS DE MXICO, S. A. de C. V.
COMPENDIO DEL MANUAL AHMSA
PARA LA CONSTRUCCIN DE ACERO
TABLAS DE CONSULTA (PROPROCIONADA POR ACEROS MONTERREY)
TUNA (TUBERIA NACIONAL)
-TUBERA MECNICA O ESTRUCTURAL
MECNICA DE MATERIALES
FITZGERALD
EDIT. ALFAOMEGA
MANUAL DE RECIPIENTES A PRESIN
DISEO Y CLCULO
EUGENE F. MEGYESY
EDIT. LIMUSA
CATALOGO 1090 MARTIN
SPROCKET & GEAR, INC.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 136 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
ANEXO 1
(NORMA CMAA)
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 137 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Para garantizar la calidad y eficiencia en la construccin de la gra para discapacitados, se
tomaron en consideracin algunos puntos de la norma CMAA, los cuales se mencionan a
continuacin.
4.1 INTRODUCCIN
La generacin de los documentos tcnicos normativos requiere de un
procedimiento metodolgico, esto con el fin de garantizar su aplicabilidad y eficiencia.
Es nuestro caso, tratndose de Normas Oficiales Mexicanas de Seguridad con carcter
obligatorio, ya que es indispensable seguir un procedimiento metodolgico
perfectamente bien definido as:
a) El planteamiento del problema puede ser analizado a partir de la hiptesis
siguiente: el trabajo en cualquiera de sus formas se ejecuta dentro de un
sistema hombremquina; requiriendo este sistema para su solucin
tecnolgica el uso de la ergonoma.
El estudio tcnicocientfico del sistema hombremquina para sistemas y
dispositivos de proteccin a la maquinara, debe estudiarse y evaluarse a partir de
la relacin: puesto de trabajoriesgoequipo de proteccin; procurndose la
identificacin de los riesgos de trabajo inherentes y en funcin del puesto de trabajo;
y as, estar en posibilidades de determinar el tipo y caractersticas de los medios de
proteccin al trabajar (equipo de proteccin personal), o en la maquinara (sistemas
y dispositivos de proteccin a la maquinara).
b) Una base de informacin tecnolgica derivada del caso de estudio, se hace
indispensable para el bosquejo del documento tcnico de base. La estructura
fundamental en la conformacin de esta base de informacin tecnolgica son
los documentos tcnicos normativos internacionales disponibles; as como, la
informacin tcnica especializada.
c) El estudio directo del sistema hombremquina ayuda a rectificar y enriquecer
el principio de bosquejo del Documento Tcnico de Base (DTB), el cual
buscara superar aspectos tcnicos deficientes con lo cual se asegura un DTB
lo suficientemente rico en aspectos tcnicosconceptuales como en aspectos
tcnicosexperimentales, garantizndose con ello ptima aplicabilidad.
d) Un anlisis de discusin en torno al DTB, tomando como punto de partida la
experiencia, la aplicabilidad, las necesidades y expectativas inmediatas tanto
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 138 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
de los recursos humanos (trabajadores) como los productos; permitirn llegar
al consenso del documento, con la participacin de los sectores: social,
privado y pblico.
e) Una vez discutido y consensado el documento tcnico de base este se eleva
a la categora de anteproyecto de norma y pasa a la Direccin General de
Normas para su homologacin y oficializacin.
f) El documento finalmente es publicado en el Diario Oficial de la Federacin
como Norma Oficial Mexicana con la siguiente leyenda: De conformidad con
el artculo 61 fraccin VII de la Ley Federal sobre Metrologa y Normalizacin,
la presente norma es de carcter obligatorio y empezara a regir a partir de su
publicacin en el Diario Oficial de la Federacin. De acuerdo a este mandato,
en este punto se inicia el proceso de difusin y aplicacin.
La estricta observancia de esta metodologa pretende garantizar un tratamiento
tcnicocientfico en la elaboracin de los proyectos de normas.
4.2. GRAS
4.2.1 GENERALIDADES Y ESPECIFICACIONES
Esta publicacin contiene informacin la cual deber ser de gran ayuda para los propsitos y usos
de gras y profesiones como la ingeniera y la arquitectura. Mientras mucha de esta informacin deber
ser de una naturaleza general, los objetos listados tal vez sern revisados con manufacturas individuales
y comparaciones hechas llevando as a una ptima seleccin de equipo.
Estas especificaciones consisten en cinco secciones, que son las siguientes:
1. Especificaciones generales
2. Clasificacin de gras por servicio
3. Diseo estructural
4. Diseo mecnico
5. Equipo elctrico
Los usuarios de estas especificaciones debern depender de sus propios ingenieros/diseadores
o un representante de un fabricante para especificar o disear aplicaciones o usos. Estas
especificaciones son ofrecidas como gua. Si un usuario las refiere, o de alguna forma se emplean, todas
o cualquier parte de stas especificaciones, el usuario est de acuerdo para seguir los trminos de
identidad, renuncia de garanta y renuncia de responsabilidad.
4.2.2 MANUAL PARA FABRICACIN DE GRAS ELCTRICAS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 139 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
1. ESPECIFICACIONES GENERALES
1.1.4 Las condiciones de servicio tienen una influencia importante en la vida de las
partes de la gra, as como ruedas, engranes, rodamientos, equipamiento
elctrico, y debern ser consideradas en especificaciones para obtener un
mxima duracin y un mnimo mantenimiento.
1.1.5 En seleccin de equipo para gras, es importante no solo tomar las operaciones
que realizara en el presente si no tambin debern ser consideradas las
operaciones futuras, las cuales tal vez incrementen las cargas y requerimientos
de servicio, estos equipos sern seleccionados para satisfacer futuras
condiciones de servicio, de este modo minimizar sobrecargas.
1.5 Conductores de deslizamiento
1.5.1 Los conductores deben ser cables de cobre duro estirado sin recubrimiento, aluminio o acero
en la forma de figuras rgidas, cables aislado, cable en carretes para levantar u otro
conveniente aplicacin que se le encuentre dependiendo de la aplicacin en particular y sern
instalados en acuerdo con el Articulo 610 del Cdigo Elctrico Nacional y cumplir con todos
los cdigos aplicables.
1.5.2 Conductores en contacto sern resguardados de tal manera que las personas no puedan
tocarlos inadvertidamente cuando estn energizados con corriente o cargando partes. Los
sistemas de conductores flexibles sern diseados e instalados de tal manera que minimicen
los efectos de la flexin, tensin del cable y abrasin.
1.5.5 Los conductores tendrn suficiente capacidad para cargar con los requerimientos actuales de
la gra, o gras, cuando operan con un coeficiente de carga.
1.5.6 El voltaje nominal que se suministrar en los conductores del sistema y los conductores para
la bajada de voltaje resultarn de las tolerancias de voltaje del motor de la gra en la Seccin
5.13 (Cadas de Voltaje).
1.5.7 En una gra el tipo de sistema para conduccin deber ser especificado y s el sistema
ser suministrado por el comprador o fabricante de la gra. S es suministrado por el
comprador, la localizacin deber ser esttica
1.6 Capacidad de carga
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 140 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
1.6.1 La capacidad de carga en una gra es especificado por el fabricante. Esta capacidad ser
marcada en cada sitio del puente de la gra y ser legible desde el sitio de operacin.
1.6.2 Las unidades individuales de izaje tendrn su capacidad de carga especificado en el tablero
de botones. Adems, las etiquetas de capacidad de carga debern ser colocadas en el
cuerpo de izaje.
1.6.3 La carga total levantada no exceder la capacidad de carga del puente. Las cargas en izaje
individual o gancho no excedern su coeficiente de capacidad.
1.6.4 Cuando la capacidad de carga de una gra sea determinado, todos los accesorios bajo el
gancho, tal como las barras de carga, magnticos, etc., sern incluidos como parte de la
carga a ser levantada.
1.7 Diseo por esfuerzos
1.7.1 Los materiales sern seleccionados apropiadamente para los esfuerzos que se presenten y
ciclos de trabajo a los cuales estos sern sometidos.
Las partes estructurales sern diseadas de acuerdo a los lmites apropiados segn las
especificaciones apropiadas. Partes mecnicas sern diseadas de acuerdo al punto 4 con
estas especificaciones. Todas las dems partes de carga transportadas sern diseadas de
acuerdo a los esfuerzos estticos en el material, basados en capacidades de carga de la
gra, no excedern el 20 % del promedio establecido para dar ltimo refuerzo del material.
Estas limitaciones de esfuerzo proporcionan un margen de refuerzo permitido para
vibraciones en las propiedades de materiales, fabricacin y condiciones de operacin, y
suposiciones de diseo, y no bajo condiciones que implican autorizacin o proteccin para
usuarios cargando la gra ms halla de la capacidad de carga.
1.9 Pintura
1.9.1 Antes del embarque, la gra ser limpiada y se le dar una capa protectora.
1.9.2 Las capas debern consistir de un nmero de capas desde la primera mano y pintura final de
acuerdo con las normas de fabricacin o de algn otro modo especificado.
1.11 Pruebas
1.11.1 Las pruebas en la planta de fabricacin son conducidas de acuerdo al procesamiento de
pruebas del fabricante, a menos que sea especificado de alguna otra forma.
1.12 Dibujos
1.12.1 Normalmente dos copias de las diagramas claros del fabricante son suficientes para
aprobarlos, uno de los cuales es aprobado y regresado a el fabricante de gras. Tambin, dos
ajustes en las instrucciones de operacin y partes de informacin son regularmente
reservados para el suministro. Detalles de los dibujos no son normalmente suministrados.
1.13 Montaje
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 141 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
1.13.1 El montaje de la gra (incluyendo ensamble, instalacin elctrica, instalacin y arranque) es
normalmente aceptada entre el fabricante y el propietario o quien proporciona las
especificaciones. La supervisin para el trabajo de ensamble y/o chequeo final puede tambin
ser aceptado por separado entre fabricante y propietario o quien proporciona las
especificaciones.
1.14 Lubricacin
1.14.1 La gra ser provista con todo lo necesario para la lubricacin apropiada. Antes de poner la
gra en operacin, la persona que realice el montaje se asegurar que todos lo valeros,
engranes, etc., estn lubricados de acuerdo con las recomendaciones del fabricante de gras.
1.15 Inspeccin, mantenimiento y operacin de la gra
1.15.1 Para inspeccin y mantenimiento de gras, referirse a lo aplicado en la seccin de
ANSI/ASME B30.2, Capitulo 2-2, y CMAA-Lista de Comprobacin para la Inspeccin de
Gras de Elevacin y Mantenimiento (CMAA-Overhead Crane Inspection and Maintenance
Checklist).
1.15.2 Para la responsabilidad del operador y capacitacin, referirse a lo aplicado en la Seccin de
ANSI/ASME B32.2, Capitulo 2-3, y CMAA-Manual para el Operador de Gras (CMAA-Crane
Operators Manual).
2. CLASIFICACIN DE LAS GRAS
2.1 Las clases por el tipo de servicio han sido establecidas de acuerdo con la gra ms
econmica, la instalacin ser especificada de acuerdo con estas especificaciones.
La clasificacin de servicio por gra esta basada en el espectro de carga reflejado en las
actuales condiciones de servicio tan cerradamente como es posible.
El espectro de carga se refiere a la carga efectiva, lo cual es uniformemente distribuida una
probable escala y aplicada en el equipo a una frecuencia establecida. La seleccin del
tamao apropiado de los componentes de la gra a desempearse en un tipo de funcin es
determinada por la variabilidad de las magnitudes de la carga y los ciclos de carga dados los
cuales pueden ser expresados en trminos del factor de carga efectivo.
k = 3 W13 P1 + W23 P2 + W33 P3 + ...Wn3 Pn
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 142 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Donde
W = Magnitud de carga; expresada con en razn de cada carga levantada a la capacidad de
carga. Operacin de levantamiento sin carga y el peso de cualquier acoplamiento deber ser
incluido.
P = Carga probable; expresada como una razn de ciclos bajo cada condicin de magnitud de
carga condiciones para el total de ciclos. La suma total de las probables cargas p deber ser
igual a 1.0
K = Significa el factor de carga efectiva. (Usado solo para establecer la clase de servicio de
una gra)
Todas las clases de gras son afectadas por las condiciones de operacin, por lo tanto para
el propsito de las clasificaciones, se asume que la gra ser operada en un ambiente normal
con temperaturas de -17.7 C a 40 C (0 a 104 F) y condiciones atmosfricas normales (libre
de polvo excesivo, humedad y gases corrosivos).
Las gras pueden ser clasificadas dentro de los grupos de carga de acuerdo a las
condiciones de servicio de la parte ms severamente cargada de la gra. Las partes
individuales las cuales son limpiadas por separado del resto, formando una unidad de auto
contenido estructural, pueden ser clasificadas dentro de diferentes tipos de gras de carga, si
las condiciones de servicio son completamente conocidas.
2.3 Clase B (Servicio ligero)
Es servicio cubre las gras las cuales tal vez pueden ser usadas en talleres de reparacin,
operaciones de ensamble ligero, servicios de construccin, fabricantes de cable ligero, etc.,
donde los servicios requeridos son ligeros y la velocidad es baja. Las cargas pueden variar de
las descargas para ocasionales capacidad de carga al mximo con 2 a 5 levantamientos por
hora, en promedio 3.04 m (10 pies) por levantamiento.
2.8 Clases de gras por servicio en trminos de clases de cargas y ciclos de carga.
La definicin de clases de gras por servicio de acuerdo con la CMAA en trminos de clases
de cargas y ciclos de cargas es mostrada en la tabla 2.8-1
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 143 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
TABLA 2.8-1
DEFINICIN DE CLASES DE GRAS POR SERVICIO DE ACUERDO CON LA CMAA EN TRMINOS
DE CARGAS Y CICLOS DE CARGAS.
Clases de Ciclos de cargas K = Factor de
cargas N1 N2 N3 N4 carga efectiva
L1 A B C D 0.35-0.53
L2 B C D E 0.531-0.67
L3 C D E F 0.671-0.85
L4 D E F F 0.851-1.00
Uso ocasional Uso regular Uso regular Uso regular
irregular en en en
seguido por operaciones operaciones operaciones
periodos de intermitentes continuas continuas
paro largos severas
Clases de cargas
L1 = Gras las cuales elevan la capacidad de carga algunas veces y normalmente cargas muy ligeras
L2 = Gras las cuales raramente elevan la capacidad de carga y cargas normalmente de 1 la capacidad de carga
3
L3= Gras las cuales levantan frecuentemente el limite de capacidad de carga y normalmente cargas entre 1 y 2 la
3 3
capacidad de carga
L4= Gras las cuales son regularmente cargadas con el limite de la capacidad de carga
Ciclos de cargas
N1= 20,000 a 200,000 ciclos
N2= 200,000 a 600,000 ciclos
N3= 600,000 a 2, 000,000 ciclos
N4= arriba de 2, 000,000 ciclos
3. DISEO ESTRUCTURAL
3.1 Material
3.1.1 Todas las estructuras utilizadas tendrn acero conforme a las especificaciones de la ASTM-
A36 o ser aceptado un tipo diferente dependiendo del propsito para el cual el acero se
utilizara y para las operaciones a ser realizadas en est. Otros materiales disponibles pueden
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 144 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
ser provistos para ser usados tomando en consideracin que las partes son proporcionadas
con factores de diseo comparables.
3.2 Soldadura
3.2.1 Todos los diseos y procesos de manufactura conforme a la emisin actual de AWS D14.1,
Specifications for Welding Industrial and Mill Cranes. Los esfuerzos de soldadura sern
determinados en el caso 1 por la combinacin de cargas, Secciones 3.3.2.4.1 y 3.4.4.2, no
excedern lo mostrado en la aplicacin de la Seccin 3.4.1 o Tabla 3.4.7-1. Permisible en los
esfuerzos de soldadura para combinaciones de cargas casos 2 y 3, Secciones 3.3.2.4.2 y
3.3.2.4.3, listos para ser proporcionados de acuerdo con las Secciones 3.4.2 y 3.4.3.
3.3 Estructura
3.3.2 Cargas
Las estructuras de la gra estn sujetas, en servicio, se repiten varias cargas con el tiempo
las cuales inducen esfuerzos variables en miembros y conexiones a travs de la interaccin
del sistema estructural y las diferentes secciones que lo atraviesan. Las cargas actuando en
la estructura estn dividas en tres categoras. Todas las cargas tienen una influencia en
anlisis de fuerzas por ingeniera son consideradas como las cargas principales, llamadas
cargas muertas, las cuales estn siempre presentes; las cargas levantadas, actan durante
cada ciclo; y las fuerzas de inercia actan durante los movimientos de la gra, componentes
de la gra, y cargas levantadas. Los efectos de las cargas, tales como cargas del viento en
operacin, fuerzas de torsin, cargas por nieve, efectos de la temperatura, cargas en pasillos,
escaleras, plataformas y pasamanos son clasificadas como cargas adicionales y solo son
consideradas para anlisis de resistencia general y anlisis de estabilidad. Otras cargas tales
como colisiones, cargas del viento este fuera de servicio, y cargas de prueba aplicadas
durante la prueba de cargas son consideradas como cargas extraordinarias y excepto cargas
por colisin y fuerzas del viento fuera de servicio no son parte de la especificacin. Fuerzas
ssmicas no son consideradas en estas especificaciones de diseo. Sin embargo, si se
requiere, las aceleraciones sern especificadas para los rieles de elevacin de la gra por el
propietario o la persona responsable de las especificaciones. Los niveles de esfuerzo
permitidos bajo estas condiciones de cargas sern aceptadas con el fabricante de gras.
3.3.2.1.1 Cargas principales
3.3.2.1.1.1 Cargas Muertas (CM)
El peso de todas las partes efectivas de la estructura del puente, las partes de la maquinaria y
el equipo de reparacin soportado por la estructura.
3.3.2.1.1.3 Cargas Levantadas (CL)
Las cargas levantadas consisten en las cargas cuando se est trabajando y el peso de los
dispositivos levantados usados para manipulacin y aseguramiento de cargas de trabajo tales
como cargas bloqueadas, levantamiento de vigas, canastillas, magnetos, agarre y otros
dispositivos suplementarios.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 145 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
3.3.2.1.1.3 Cargas Levantadas (CL)
Las cargas levantadas consisten en las cargas cuando se est trabajando y el peso de los
dispositivos levantados usados para manipulacin y aseguramiento de cargas de trabajo tales
como cargas bloqueadas, levantamiento de vigas, canastillas, magnetos, agarre y otros
dispositivos suplementarios.
3.3.2.1.1.4 Fuerzas Verticales de Inercia (FVI)
Las fuerzas verticales de inercia incluidas las debidas al movimiento de la gra o
componentes de la gra y las debidas a levantamientos o izajes lentos de cargas. Estas
cargas adicionales pueden ser incluidas de una manera simplificada por la aplicacin de un
factor separado para las cargas muertas (FCM) y para el levantamiento de cargas (FCL) para
las cuales las cargas verticales actan, las fuerzas en los miembros o los esfuerzos debidos a
estos, debern ser sumados.
3.3.2.1.1.4.1 Factor de Cargas Muertas (FCM)
Este factor solo es para las cargas muertas de la gra, trole y equipo asociado y sern
tomados de acuerdo con la Tabla 3.3.2.1.1.4.1-1
TABLA 3.3.2.1.1.4.1-1
Velocidad de movimiento (FPM) Factor de Carga Muerta (FCM)
Arriba de 200 1.1
Por encima de 200 1.2
3.3.2.2.2.4.2 Factor de Elevacin de Carga (FEC)
Este factor aplica al motor de la capacidad de carga en direccin vertical, y cubre fuerzas de
inercia, las fuerzas debido a la masa para el levantamiento repentino del izaje de cargas y las
fuerzas inadvertidas que sean producidas por otras influencias. El factor en el izaje es del
0.5% de la velocidad de izaje en pies por minuto, pero no menos del 0.15% o ms del 0.5%,
excepto para gras de ollas o magnticas para las cuales el valor del impacto ser tomado
con el 0.5% de la capacidad de carga de la vasija o el magneto izado.
(FEC ) = 0.15 0.005(Velocidad de izaje) 0.5
3.3.2.1.1.5 Control de las Fuerzas de Inercia (CFI)
Las fuerzas de inercia ocurren durante la aceleracin o desaceleracin del motor de la gra y
dependen del manejo y torques en el frenado aplicados por el conductor de la unidad y el
frenado durante cada ciclo.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 146 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Las cargas laterales debidas a la aceleracin o la desaceleracin sern un porcentaje de la
carga vertical considerado como 7.8 veces el ndice de aceleracin y desaceleracin (ft/seg2)
pero no menos del 2.5% de la carga vertical. Este porcentaje ser aplicado en ambas cargas
vivas y muertas, exclusivo del final del trole y de los empalmes. Las cargas vivas sern
localizadas en la misma posicin como cuando se calculan los momentos verticales. Las
cargas laterales sern equivalentemente divididas entre las dos vigas, y el momento de
inercia en la seccin completa de la viga acerca de sus ejes verticales que sern usados para
determinar los esfuerzos debidos a las fuerzas laterales. Las fuerzas de inercia durante la
aceleracin y desaceleracin sern calculadas en cada caso con el trole en posicin crtica
para que el componente sea analizado.
3.3.2.2 Fuerzas y Momentos de Torsin
3.3.2.2.1 Debidos al Arranque y Paro del Motor
El momento de torsin debido al arranque y paro del motor ser considerado como la torsin
de arranque del motor al 200% de la torsin producida por la carga total multiplicado por la
razn de la viga entre el motor y la cruceta.
4. DISEO MECNICO
4.1 Promedio efectivo de carga
Nota: De manera para facilitar una medicin, factores para durabilidad, carga y servicio sern
usados para determinar el promedio de carga efectiva in una clasificacin del servicio para
componentes mecnicos.
4.1.1 El factor mecnico de carga efectiva promedio Kw ser establecido por el uso de la siguiente
ecuacin:
2(carga mxima ) + (carga mnima )
Kw =
3(carga mxima )
La mxima carga usada en la ecuacin anterior ser establecida por la capacidad de carga
usada posicionada como resultado de la mxima reaccin en los componentes bajo
consideracin. Los impactos no sern incluidos. La mnima carga que a ser utilizada ser
establecida por la carga muerta del puente o solo la trole.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 147 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
4.1.2 Factores de carga Kw convierten la carga mxima en el promedio efectivo de carga como
sigue, y estos son usados para la durabilidad de los engranes HP y el calculo de la vida til de
los rodamientos.
Promedio efectivo de carga = carga mxima Kw
4.1.2.1 El factor Kwh para la maquinaria de izaje se establece en la siguiente ecuacin:
2(capacidad de carga ) + 3(peso bloque ms bajo )
Kwh =
3(capacidad de carga + peso bloque ms bajo )
El peso de los bloques ms bajos son menores que del 2% de la capacidad de carga algunas
veces se ignoran resultando Kwh = 0.667.
4.1.2.2 El factor de carga Kwt para la maquinaria del trole se establece por la siguiente ecuacin:
2(capacidad de carga ) + 3(peso carretilla )
Kwt =
3(capacidad de carga + peso carretilla )
4.1 2.3 El factor de carga Kwb para el control del puente de maquinaria se establece con la siguiente
ecuacin:
2(capacidad de carga ) + 3(peso carretilla + peso puente )
Kwb =
3(capacidad de carga + peso carretilla + peso puente )
4.1.2.4 Para factores Kw para ensamble de ruedas en el trole y puente, ver Seccin 4.13.3. Kwb y
Kwt sern usados para la seleccin del eje de los baleros.
4.1.3 El factor de servicio de la maquinaria (Cd) listado en la Tabla 4.1.3-1 depende de la clase de
servicio de la gra y toma en cuenta diferentes aspectos de espectros de carga denso y
severamente para servicio y es usado para determinar el tiempo de vida del engrane.
4.1.4 Factores de concentracin de esfuerzos pueden ser obtenidos desde datos de factores de
concentracin de esfuerzos por R. E. Peterson (Ver Seccin 1.1.6).
TABLA 4.1.3-1
Factor de servicio para maquinaria Cd
Clase de A B C D E F
servicio
Cd 0.64 0.72 0.8 0.9 1.0 1.16
4.4 Cables para el levantamiento
4.4.1 Los cables para el levantamiento sern de un apropiado diseo y construccin para
el tipo de servicio de la gra. La capacidad de carga ms el peso de las cargas por bloqueos
dividido entre el nmero de partes del cable no exceder el 20% de la resistencia de los cables
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 148 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
establecida para el frenado excepto para ser usados, para asegurar o izar metal fundido el cual
no exceder el 12.5% de la resistencia establecida para cables en el frenado.
4.4.3 ngulo de enrollamiento para cable
4.4.3.1 El ngulo de enrollamiento para el tambor del cable. El ngulo de la armadura para el cable
deber ser limitado de 1 a 14 ranuras (4 grados) como se muestra en la Figura 4.4.3.1-1
4.4.3.2 El ngulo de enrollamiento para el cable en poleas. El ngulo de enrollamiento en poleas
deber estar limitado de 1 a 12 ranuras (4 grados - 45minutos) como se muestra en la Fig.
4.4.3.2-1.
4.4.4 La norma recomienda que las poleas y tambores para el dimetro del cable han sido encontrados
por experiencia dando un desempeo satisfactorio bajo un amplio rango de aplicaciones. El
alambrado en los cables es considerado como objeto de mantenimiento continuo.
Los intervalos de mantenimiento en el alambrado de cables deben ser alargados por:
Incremento de la polea y tambor a razn del dimetro del cable
Minimizacin del nmero de curvas en el cable
Minimizacin de curvas invertidas en el cable
Minimizacin del tambor de la polea y el ngulo de polea a polea
4.5 Poleas
4.5.1 Las poleas sern de acero o mnimo ASTM grado A48 edicin anterior, Clase 40 hierro
fundido u otro material disponible como esta especificado por el fabricante de gras.
4.5.2 La tabla 4.5.2-1 es una gua para seleccionar el dimetro de las poleas corredizas. Poleas
pequeas pueden causar un incremento en el mantenimiento del cable.
TABLA 4.5.2-1
GUA PARA SELECCIONAR EL DIMETRO MNIMO DE LAS POLEAS CORREDIZAS
Clase Cables clase Cables clase
CMAA 6 x 37 6 x 19
A&B 16 20
C 18 24
D 20 x d 24 x d
E 24 30
F 30 30
4.5.3 El dimetro seleccionado para poleas iguales no deber ser menor que la mitad del dimetro
de la polea corrediza, y tambin no ser menor que 12 veces el dimetro del cable cuando se
usan cables clase 6 x 37 o 15 veces el dimetro para cables clase 6 x 19.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 149 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
4.5.4 Cuando haya claros especiales, levantamientos o cabinas de control bajos sean requeridos,
esto podra ser necesario desviarse de estas limitantes.
4.6 Tambores
4.6.1 Los tambores sern diseados para soportar todas las combinaciones de cargas, incluyendo
cruzamientos o deformaciones, flexiones, torsin y corte, tomando en consideracin los
esfuerzos por cambio de direccin y fatiga, de acuerdo con el servicio y proceso de
fabricacin.
El material del tambor ser como el especificado por el fabricante de gras. Los tambores de
hierro fundido sern ASTM grado A48 edicin anterior, clase 40 o similar. Los tambores de
acero fundido sern ASTM A27 o similar. Los tambores de acero soldado sern ASTM A36 o
similar.
S se usa un diseo de tambor soldado, los esfuerzos sern evaluados usando el criterio
como se define en la Seccin 3.4.7.
4.6.1.1 La flecha del tambor ser diseada de acuerdo a la Seccin 4.11.4 de esta especificacin.
4.6.2 El tambor ser diseado con no menos de dos envolventes para el cable de izaje
permaneciendo en cada anclaje cuando el gancho esta en su posicin ms baja, a menos
que sea provisto de un dispositivo limitador para la parte ms baja, para lo cual permanecer
no menos de una envoltura. No ser permitido encimar el cable cuando el gancho esta en el
punto ms alto.
4.6.3 Las ranuras del tambor sern maquinadas. Las ranuras debern ser en la parte izquierda y
derecha a menos que sea especificado de otra manera por el fabricante de gras.
4.6.3.1 La profundidad mnima en la ranura recomendada es 0.375 x dimetro del cable.
4.6.3.2 El paso de ranura del tambor recomendado es 1.14 x dimetro del cable o dimetro del cable
+ 1/8 pulgada, cualquiera es ms pequeo.
4.6.4 La tabla 4.6.4-1 es una gua para el paso diametral mnimo del tambor. Los tambores ms
pequeos pueden causar un incremento en el mantenimiento del cable.
Tabla 4.6.4-1
Gua para seleccionar el paso diametral mnimo del tambor
Clase Cables clase Cables clase
CMAA 6 x 37 6 x 19
A&B 16 20
C 18 24
D 20 x d 24 x d
E 24 30
F 30 30
d = dimetro del cable
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 150 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
4.6.5 Cuando haya claros especiales, levantamientos o son requeridos cuartos de control bajos,
podra ser necesario desviarse de estas limitantes.
4.7 Engranes
4.7.1 Los tipos de engranes sern especificados por el fabricante.
4.7.2 Todos los engranes y piones sern diseados de acero u otro material de resistencia y
durabilidad conociendo los requerimientos dirigidos para esa clase de servicio, y se fabricaran
de acuerdo con AGMA con calidad clase 5 o superior.
Para el propsito de estas especificaciones, la resistencia y durabilidad ser basada en el
torque requerido para levantar la capacidad de carga para los engranes del izaje y el
coeficiente de las placas del motor para engranes en movimiento. Ambas consideraciones
sern dadas para el torque de frenado mximo el cual puede ser aplicado por el operador.
Tambin, sern tomadas consideraciones a los engranes de transmisiones en movimientos
de una parte ms grande que el torque total de los engranes del motor para el izaje.
4.7.3 La clasificacin por potencia para engranes rectos, helicoidales y espina de pescado estarn
basados en la American Gear Manufacture Association (AGMA) Standards: 220.02, Rating
for Strength of Spur Gear Teeth (Coeficiente de resistencia para los dientes de engranes
rectos), 210.02, Surface Durability of Spur Gear Teeth (Durabilidad de la superficie en
dientes de engranes rectos), y 211.02, Surface Durability of Helical and Herringbone Gear
Teeth (Durabilidad de la superficie en dientes de engranes helicoidales y espina de
pescado). Para el propsito de esta especificacin, la ecuacin de potencia se escribe:
Potencia de resistencia permitida
Np d Kv F Sat J
Pat =
126000 Km Pd Sf
Potencia de durabilidad permitida
2
Np F I Cv Sac d Ch
Pac =
126000 Cm Sfd Cp
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 151 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Donde:
Pat Potencia de resistencia permitida
Pac Potencia de durabilidad permitida
Np Velocidad del pin (RPM)
d Dimetro del pin (pulgadas)
Kv Factor dinmico (resistencia)
Cv Factor dinmico (durabilidad)
F Ancho de cara de red ms estrecha de la unin de engranes
Km Factor de distribucin de carga (resistencia)
Cm Factor de distribucin de carga (durabilidad)
Cp Coeficiente elstico
Ch Factor de dureza (durabilidad)
J Factor geomtrico (resistencia)
I Factor geomtrico (durabilidad)
Pd Paso diametral
Sat Esfuerzo por flexin permitido para el material libras por pulgada cuadrada
(resistencia)
Sac Esfuerzo por contacto permitido para el material libras por pulgada cuadrada
(durabilidad)
Sf Factor de servicio de la gra (resistencia)
Sfd Factor de servicio de la gra (durabilidad)
Los valores de Kv, Cv, Ch, Km, Cm, Cp, J, I, Sac y Sat pueden ser determinados desde las
tablas y curvas en las especificaciones de la norma AGMA previamente mencionada, Sf en la
Seccin 4.7.4, los valores restantes sern caractersticas fsicas pertenecientes a los
engranes por sus caractersticas de operacin.
El factor de servicio de la gra Sfd ser determinada por la ecuacin Sfd = Cd x Kw. Para
valores de especficos Kw referirse a la Seccin 4.1 y para los valores de Cd referirse a la
Seccin 4.1.3 para la clase de gras.
Nota: Kw = Factor de carga, Cd = Factor de Servicio de la maquinaria.
4.7.4 Los factores de servicio por resistencia se muestran en la Tabla 4.7.4-1
Tabla 4.7.4-1
Clase de Gra Sf
A 0.75
B 0.85
C 0.90
D 0.95
E 1.00
F 1.05
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 152 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
4.7.5 Cuando se pide un engrane, la capacidad de este ser proporcionada por el fabricante de
engranes con sus apropiados factores de servicio. Debern ser tomadas las debidas
consideraciones para encerrarlo cuando se seleccionan engranes para controladores de
movimiento.
4.7.6 Esto quiere decir que debern ser provistos asegurando una adecuada y apropiada
lubricacin en los engranes.
4.7.7.1 Las guardas sern aseguradas correctamente.
4.7.7.2 Cada guarda ser capaz de soportar el peso de 200 libras por persona sin tener
deformaciones permanentes, a menos que la guarda ste localizado donde sea imposible
permanecer parada.
4.8 Rodamientos
4.8.1 El tipo de rodamientos ser especificado por el fabricante.
4.8.2 Los rodamientos antifriccin sern seleccionados dando la mnima expectativa de vida
basada en la mxima velocidad permitida:
Tiempo de vida de los rodamientos AFBMA L-10
Clase A 1250 Horas
Clase B 2500 Horas
Clase C 5000 Horas
Clase D 10000 Horas
Clase E 20000 Horas
Clase F 40000 Horas
Usar el factor de carga Kw para todas las aplicaciones como se determina en la Seccin 4.1
de esta especificacin.
4.8.3 La cubierta de los rodamientos tendr una presin mxima de sujecin como lo recomienda el
fabricante de rodamientos.
4.8.4 Todos los rodamientos sern provistos con la apropiada lubricacin o lo apropiado para su
lubricacin. Para los rodamientos cerrados debern ser diseados prcticamente excluyendo suciedad y
previniendo goteo de aceite o grasa.
5. EQUIPO ELCTRICO
5.1 General
5.1.2 Los fabricantes de gras proponen que se debe de incluir la potencia y la descripcin de
todos los motores, frenos, dispositivos de control, de proteccin y de seguridad.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 153 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
5.1.3 Los fabricantes de gras deben suministrar y montar todo el equipo elctrico,
conductores e instalacin elctrica a menos que otro lo especifique. Si es necesario desmontar
parcialmente la gra para su envi, todos los conductos y la instalacin elctrica afectada ser
recortada a la medida e identificada para su fcil reensamblaje. La conexin del puente, los
rieles conductores y otros accesorios tiles pueden removerse para su envi.
5.1.4 La instalacin elctrica y los aditamentos deber obedecer al Articulo610 del Cdigo Nacional de
Electricidad.
5.1 Motores C.A Y C.D
5.1.1 Los motores sern diseados especficamente para gras y para rendimiento de malacates y ser
conforme a NEMA Estndar MG 1 o AISE Estndar No. 1 o 1 donde es aplicable. Los diseos de
no conformidad con estos estndares sern especificados.
5.1.1.1 Los motores de induccin de C.A pueden ser del tipo de motores de devanado (de inducido
devanado) o de motor de jaula de ardilla (de velocidad simple o velocidad mltiple).
5.1.1.2 Los motores de C.D pueden ser de tipo devanado en serie, devanado en derivacin o devanado
combinado, o de magneto permanente.
5.1.2 Voltaje
5.1.3 Voltaje
La tensin nominal del motor y el sistema de voltaje nominal correspondiente ser conforme a la
tabla 5.2.4-1 (Referencias: AC-ANSI C84, 1-1977, Apndice y Tabla C3. DC-AISE Std. No. 1,
Revisada en septiembre 1968, Elctrica 2. Fuentes de voltaje y 3. Campo de voltaje; tambin
NEMA MGI-10.62).
TABLA 5.2.4-1
SISTEMA NOMINAL Y TENSION NOMINAL DEL MOTOR
FUENTE DESCRIPCION SISTEMA VOLTAJE NOMINAL TENSION NOMINAL DEL MOTOR
AC AC DC 3 FASES SIMPLE FASE
120 --- 115
208 200 ---
60 Hz (1) (2)
240 230 230
480 460 ---
600 575 ---
50 Hz 400 380 ---
Voltaje ajustable en derivacin o
Rectificada
compuesto
Campo en
Armadura
derivacin
400-3-60 460 Max. (9) 230 (4) 230 (5))
240-3-60 (6) (9) 240 150 o 240
460-3-60 (7) (9) 500 240 o 300
(9) Potencia constante en serie,
208 a 600
360 Max. derivacin o compuesto
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 154 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
230 o 240 (3) (8)
Generador o
DC --- 250 230 o 240 (3) (8)
batera
(1) Aplicable a todo el sistema nominal de voltaje contenidos.
(2) Para el sistema nominal de voltaje mostrando otros que estn cerca, la tensin nominal del motor deber ser
cualquiera de los dos igual que en el sistema nominal de voltaje o relacionando el sistema nominal de voltaje
por aproximadamente en razn 115 a 120. ciertamente los tipos de equipos tienen un lmite de voltaje
mximo de 600 volts; los fabricantes y el suministro de poder deber ser consultado, asegurando la propia
aplicacin.
(3) El rendimiento no necesariamente debe ser igual al rendimiento nominal cuando esta presente la aplicacin
de alternacin de voltaje unidireccional.
(4) AISE Std. No. 1, Rev. 9-68 Elctrico 2B (motor de fabrica)
(5) AISE Std. No. 1, Rev. 9-68 Elctrico 3 (motor de fabrica)
(6) NEMA MG1-10.62B y Tabla 10-4 (motor industrial)
(7) NEMA MG1-10.62B y Tabla 10-45 (motor industrial)
(8) Tensin nominal puede ser 250 bastidor largo 300 HP, 850 RPM y largos.
(9) Mximo voltaje de entrada del motor
5.1.3.1 Variaciones de AC
5.1.3.1.1 Variaciones de la tensin nominal
Todos los motores de induccin de AC con frecuencia nominal y la aplicacin de la tensin
equilibrada debe ser capaz de acelerar y accionar la capacidad de carga del gancho a ms o
menos el 10 por ciento de la tensin nominal del motor, pero no es necesario el valor de
rendimiento de la tensin nominal. (Referencia NEMA MG 1-12.43)
5.1.3.1.2 Desequilibrio de voltaje
Los motores polibase de AC sern capaces de acelerar y accionar la capacidad de carga del gancho
cuando el voltaje se desequilibre las terminales del motor no deber exceder del 1 por ciento. El
rendimiento no ser necesario ser el mismo que cuando el motor esta en operacin con voltaje equilibrado
en las terminales del motor. (Referencia NEMA MG 1-12.45.a).
5.1.4 Seleccin del tamao del motor: La seleccin del tamao del motor implica el torque y las
consideraciones trmicas.
5.1.4.1 La capacidad de motor o de otra transmisin, el malacate o el avance horizontal, usando una u
otra de las fuentes de AC o DC, son bsicamente los caballos de fuerza del mecanismo
considerando el efecto de control, la temperatura ambiente y el tipo de servicio.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 155 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
5.1.4.1.1 Transmisin del malacate
5.1.4.1.1.1 Caballos de fuerza mecnico
WxV
Mecnica HP =
33000 xE
W = Peso total en libras del sistema de cuerda a la elevacin de la transmisin del malacate.
Este incluye todos los componentes que el comprador aplique al malacate tal como la
carga elevada, la cual incluye que el comprador suministre los dispositivos y el
fabricante de gras suministre los componentes incluyendo el motor con gancho y los
dispositivos.
V = Velocidad especificada en pies por minuto cuando levanta el peso W.
E = Eficiencia mecnica entre la carga y el motor, expresado de forma decimal, donde:
E = E gn xE sm
Eg = Eficiencia por reduccin del engrane.
n = Nmero de reduccin del engrane.
Es = Eficiencia del sistema de cable por la rotacin de la polea.
m = Nmero de revoluciones de la polea entre el tambor y el paso del balancn sobre cada
parte del movimiento del cable unido al tambor.
TABLA 5.2.9.1.1.1-1
VALORES TIPICOS DE EFICIENCIA
Eg* Es
COJINETES
.97 .99
ANTIFRICCION
.93 .98
* Nota: Los valores de la eficiencia del engrane se muestran aplicando primordialmente engranes rectos,
doble helicoidal y helicoidal, y estos no sern destinados en casos especiales tal como en los
engranajes de tornillo sin fin.
La reduccin de Eg. Es .02 es recomendado lubricar con grasa el engrane.
5.1.4.1.1.2 Caballos de fuerza requeridos por el motor.
El levantamiento del motor deber ser seleccionado por la capacidad de potencia, los cuales
no debern ser menores que el resultado de la siguiente formula:
Capacidad requerida en caballos de fuerza = Caballos de fuerza mecnico x Kc
Donde:
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 156 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Kc = Factor de control, el cual es el valor corregido que describe los efectos del
control teniendo el torque y la velocidad del motor.
Kc = 1 Para la mayora de los controles tales como el rotor devanado magntico de
AC, inversor, o los sistemas estticos donde hay prdida permanente de
resistencia secundaria, los sistemas de motor de jaula de ardilla, y los
sistemas magnticos de potencia constante con suministro de fuentes de DC.
Para los sistemas de rotor devanado, control magntico o esttico con prdida permanente de
resistencia secundaria.
Valor del motor con carga completa RPM
Kc =
operacion del motor RPM, cuando se eleva
* Valor del torque con prdida permanente de resistencia.
Valor de Kc para el suministro de potencia rectificado de la gra, para usar con motores de
DC, sistemas de control magntico o esttico, los cuales debern estar determinados al
consultar el motor o por los fabricantes del control.
Los mtodos descritos por la seleccin de los caballos de fuerza del motor de la gra usados
de CMAA Clase D. Para las clases E y F, debido a las consideraciones debern tambin ser
dados los efectos trmicos causados por el servicio. Por ejemplo, este puede requerir el largo
del bastidor, mayor potencia, fuerza de enfriamiento, etc.
La magnitud que se permite al seleccionar el valor de la potencia prxima del motor, arriba o
bajo los requisitos de potencia, utiliza los motores comerciales disponibles. En ambos casos
se deber determinar el propio rendimiento de la transmisin.
5.1.4.2 Relacin del engranaje con controlador de izaje
Nf D
Relacin del engranaje con controlador de izaje =
R V 12
Donde:
Nf = accionamiento libre del motor en RPM, cuando la capacidad de carga W (lbs) y la
velocidad de ascenso V (FPM) el valor de Nf esta establecido para las curvas del motor-
control velocidad-torque elevando la carga total (HP FL).
WV
HP FL =
33000 E
E = eficiencia mecnica por 5.2.9.1.1.1
D = dimetro primitivo del tambor en pulgadas
V = velocidad de ascenso especificada la carga total en FPM
nmero total de cuerda soportando la carga
R = reduccin del radio del cuerda =
nmero de cuerda del tambor
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 157 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
5.2 Caractersticas de proteccin y seguridad.
5.6.1 El medio de desconexin de las gras, ambas con capacidad de corriente del circuito con
interruptor automtico o motor capacitado con interruptor, con cerradura en posicin abierta,
sern provistas con guas para el contacto de los rieles conductores o de otros suministros de
energa.
5.6.2 La capacidad de corriente continua de los interruptores o de los circuitos con interruptor
automtico en la seccin 5.6.1 sern de menos que el 50 por ciento de la combinacin de la
disminucin de tiempo de la corriente total del motor de carga, no menor que el 75 por ciento de
la suma de la disminucin de tiempo de la corriente total de carga que requieren los motores para
cualquier gra simple, mas la adicin de alimentacin de carga por los dispositivos.
5.6.3 Los medios de desconexin de la seccin 5.6.1 tendrn medios de apertura localizables donde
estos sean buenamente accesibles por el operador de la estacin, o por la conexin de los
contactores a la lnea principal despus de que los dispositivos en la seccin 5.6.1 pueden ser
suministrados y sern operables desde la estacin del operador.
5.6.4 Los circuitos de poder que fallen por los dispositivos de proteccin sern suministrados de
acuerdo con NEC seccin 110-9 capacidad de interrupcin. Al usar la variacin de estado falla la
corriente o los fabricantes de gras darn las especificaciones de capacidad de interrupcin que
ser suministrada.
5.6.5 La proteccin del circuito derivado ser provista por NEC seccin 610-42 proteccin del circuito
derivado.
5.6.6 Los contactores de lnea principal magnticos, cuando son usados, sern mostrados en la tabla
5.6.6-2. El tamao no ser menor que la capacidad mas larga del contactor primario usada en
cualquier movimiento.
TABLA 5.6.6-1
CAPACIDAD DE CONTACTORES DE A.C
Para trabajo de lnea principal
Capacidad de Potencia mxima total del Potencia mxima de cualquier
Capacidad de
trabajo motor movimiento
Tamao del abertura 8
mxima
contactor horas
intermitente 230 V 460 y 575 V 230 V 460 y 575 V
Amperes
Amperes*
0 20 20 6 6 3 5
1 30 30 10 20 7 10
2 50 67 30 60 20 40
3 100 133 63 125 40 80
4 150 200 110 225 63 125
5 300 400 225 450 150 300
6 600 800 450 900 300 600
7 900 1200 675 1350 450 900
8 1350 1800 900 1800 600 1200
* el ltimo disparo de corriente de sobrecarga (sobrecorriente) los reles u otros dispositivos de proteccin del motor
usados no excedern del 115 por ciento de estos valores o 125 por ciento de la corriente total del motor de carga,
cualquiera que sea menor.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 158 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
5.6.7 El motor ser provisto de proteccin para sobrecargas que puedan ocurrir de acuerdo con
NEC 610-43 Motor Running Overcurrent Protection.
5.6.8 Los circuitos de control sern protegidos de acuerdo con NEC 610-53 Overcurrent Protection.
5.6.9 Ser provisto con una proteccin para bajo voltaje como una funcin de cada control del
motor, o un panel proteccin cerrado, o un contactor magntico para la lnea principal, o un
apagador de desconexin magntico-manual.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 159 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
ANEXO 2
(TABLAS Y CATALOGOS)
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 160 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
TABLA TOMADA DEL LIBRO DE RESISTENCIA DE MATERIALES DE SINGER Y PYTEL.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 161 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INFORMACION PARA SELECCIONAR CABLES, POLEAS Y EL TAMBOR, TOMADO
DEL FORMULARIO DE MECNICA DE L. PARETO
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 162 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 163 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 164 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 165 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 166 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 167 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Designacin del cable
La composicin de un cable se expresa en la prctica de forma abreviada, mediante una notacin
compuesta por tres signos, cuya forma genrica es: A x B + C siendo A el nmero de cordones; B
el nmero de alambres de cada cordn y C el nmero de almas textiles. Cuando el alma del cable
no es textil o sea formada por alambres, se sustituye la ltima cifra C, por una notacin entre
parntesis que indica la composicin de dicha alma. Si los cordones o ramales del cable son otros
cables, se sustituye la segunda cifra B por una notacin entre parntesis que indica la
composicin.
A efectos de designacin debe considerarse tambin las distintas formas de disposicin de los
alambres en los cordones, el tipo de arrollamiento y si el material que lo constituye es preformado
o no.
Ejemplo:
Un cable constituido por 6 cordones de 25 alambres cada cordn, dispuestos alrededor de un alma
compuesta por un cordn metlico formado por 7 cordones que contienen 7 hilos cada uno, se
representara por:
Resistencia del cable
La resistencia a la rotura a traccin de un cable est determinada por la calidad del acero utilizado
para la fabricacin de los distintos alambres, el nmero y seccin de los mismos y su estado de
conservacin.
La carga de rotura de un alambre es el producto de su resistencia mnima por la seccin recta del
mismo.
Se denomina carga de rotura calculada de un cable, a la suma de las cargas de rotura de cada uno
de los alambres que lo componen.
Se denomina carga de rotura efectiva de un cable al valor que se obtiene rompiendo a traccin un
trozo del cable, en una mquina de ensayo.
Coeficiente de seguridad
El coeficiente de seguridad de trabajo de un cable es el cociente entre la carga de rotura efectiva y
la carga que realmente debe soportar el cable.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 168 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
La Ordenanza General de Seguridad e Higiene en el Trabajo dispone en su Art. 112.2 que para
los aparatos de elevacin y transporte el factor o coeficiente de seguridad no ser inferior a 6. No
obstante existen diversas Normativas y Reglamentos especficos (Aparatos elevadores, Minera,
etc.) a los que cada equipo debe
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 169 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 170 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 171 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 172 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Seleccin de rodajas
TABLA DE SELECCION DEL TIPO DE RODAJAS
Considerando que normalmente una plataforma es movida por un solo
operador, la siguiente tabla muestra la fuerza necesaria para el manejo de
distintas cargas.
Tanto las ruedas como los herrajes soportan cargas superiores a las
recomendadas. La fuerza a desarrollar por un operador para la maniobra de
una plataforma debe de estar entre 10 y 25 Kg. en trabajo normal.
Fuerza en Kg. requerida para mover una plataforma en relacin al dimetro
de la rueda y su carga
Carga sobre la Plataforma en Kg.
50 100 250 500 750 1000 1250 1500 1750 2000 2500 2750 3000
3 4 8 20 22
4 4 11 19 29 38
5 9 15 25 33 36
Dimetro de
la Rueda en 6 6 13 20 26 33 40 47 54
Pulgadas
8 4 9 14 19 24 29 33 38 43
10 17 20 24 27 30 33 37
12 16 19 20 24 27 30
SERIE LIGERA SERIE MEDIO PESADA SERIE PESADA
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 173 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
Informacin sobre el balero seguidor
CAM FOLLOWERS
CHOOSE FROM THE BROADEST LINE OF CAM FOLLOWERS...
In 1937, McGILL engineers invented the first needle bearing cam follower. Since that time, McGILL has
maintained its leadership position through development of innovative solutions to the problems faced by
industry. McGILL offers a variety of problem solving cam followers, along with having the broadest line of
standard cam followers in the industry.
The Problem SolverCRES
CRES (Corrosion Resistant Engineered Solutions) CAMROL cam followers from
McGILL are designed to help solve corrosion problems. Processors of food,
beverage and pharmaceutical products face the ever present challenge of
providing wholesome products. Many processors have adopted HACCP (Hazard
Analysis and Critical Control Points) plans to insure safe production. McGILL
CRES CAMROL bearings join the EPT family of CRES solutions to help meet
your needs.
More Corrosion Resistance
440C Stainless Steel Components
Improved Sealing
LUBRI-DISC+ Seals
Quality Heat Treatment
Zone Hardened Stud
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 174 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 175 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 176 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 177 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 178 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 179 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 180 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
CONSIDERACIONES GENERALES PARA LA SELECCIN DE UN
MOTOR DE CORRIENTE DIRECTA
Para la seleccin apropiada de un motor, se debe tomar en cuenta una amplia variedad de factores:
1. Fuente de energa elctrica: VOLTAJE, FRECUENCIA Y FASES.
2. Condiciones ambientales en donde se instalar: TEMPERATURA MXIMA Y MNIMA AMBIENTE,
OPERAR EN EL INTERIOR O A LA INTEMPERIE; EN QUE ATMSFERA FUNCIONAR, POLVOS,
CIDOS, HMEDAD. A QUE SOBRE EL NIVEL DEL MAR SE PONDR EN OPERACIN.
3. Conexin a la carga: DIRECTO, POR COPLE, POR BANDAS PLANAS, POR BANDAS EN V, POR
CADENAS, REDUCTOR U OPERADO POR CLUTCH MAGNTICO.
4. Velocidad de operacin:
5. Requerimientos de: PAR DE LA CARGA A PLENA CARGA, ARRANQUE, ACELERACIN Y PICOS
DE DEMANDA.
6. Ciclo completo de la carga.
7. Momento de inercia de la carga: ES DECIR, LA ENERGA ALMACENADA QUE EL MOTOR DEBE
ACELERAR (WK2). ES IMPORTANTE SABER SI LA INERCIA DE LA CARGA ES MAYOR QUE EL
ROTOR DEL MOTOR, SI LA CARGA OPERA CON ARRANQUES FRECUENTES, CON CAMBIOS DE
VELOCIDAD O DE GIRO.
8. Par y potencia: CONSTANTE O VARIABLE.
9. Carga a mover.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 181 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
TABLA PARA LA SELECCIN DEL MOTOREDUCTOR
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 182 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
SELECCIN DE LOS COPLES
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 183 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 184 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
TABLA H
Dimensiones y propiedades de tubos
Dimensiones Peso Propiedades
Dimetro Dimetro Dimetro por pie A I S r
nominal exterior interior Espesor lbs plg2 plg4 plg3 plg
plg plg plg extremos
libres
Peso Estndar
.840 .622 .109 .85 .230 .017 .041 .281
1.050 .824 .113 1.13 .333 .037 .071 .334
1 1.315 1.049 .133 1.68 .494 .087 .133 .421
1 1.660 1.380 .140 2.27 .669 .195 .235 .540
1 1.900 1.610 .145 2.72 .799 .310 .326 .623
2 2.375 2.067 .154 3.65 1.07 .666 .561 .787
2 2.875 2.469 .203 5.79 1.70 1.53 1.06 .947
3 3.500 3.068 .216 7.58 2.23 3.02 1.72 1.16
3 4.000 3.548 .226 9.11 2.68 4.79 2.39 1.34
4 4.500 4.026 .237 10.79 3.17 7.23 3.21 1.51
5 5.563 5.047 .258 14.62 4.30 15.2 5.45 1.88
6 6.625 6.065 .280 18.97 5.58 28.1 8.50 2.25
8 8.625 7.981 .322 28.55 8.40 72.5 16.8 2.94
10 10.750 10.020 .365 40.48 11.9 161 29.9 3.87
12 12.750 12.000 .375 49.59 14.6 279 43.8 4.38
tomado del Manual of Steel Construction, 8. Ed., American Institute of Steel Construction,
derechos reservados, 1980, cortesa del American Institute of Steel Construction.
524
TABLAS DE TUBOS COMERCIALES
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 185 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 186 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 187 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 188 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 189 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
TABLA DE PROPIEDADES DEL ACERO S.A.E. 1010
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 190 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
TABLAS SOBRE PINTURA PARA LA GRA
La tabla 1 hace mencin de los sistemas de pinturas que se deben emplear, para proteger la
superficie de los metales ante la corrosin, en nuestro caso se aplico el sistema 2.01 ya que se
adecua a nuestras necesidades.
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 191 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
En esta tabla hace mencin el tipo de limpieza que se debe emplear en el material antes de aplicar
la pintura, para garantizar una mejor adhesin de la pintura, en nuestro caso se eligi el punto 2
(SSPC-SP 2-63), ya que fue el procedimiento que se requera para eliminar las impurezas del
material
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 192 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
SOPORTE PARA SUJETAR AL PACIENTE (ARNES)
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 193 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
DIMENSIONES PARA LA BASE DE LA GRA FIJA
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 194 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 195 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 196 DE 197
ESIME UNIDAD PROFESIONAL AZCAPOTZALCO
GRAS MECNICAS PARA DISCAPACITADOS
INGENIERA EN ROBTICA INDUSTRIAL PAGINA 197 DE 197
Você também pode gostar
- Motores de Combustión InternaDocumento71 páginasMotores de Combustión InternaVictor ParedesAinda não há avaliações
- Ingenieria de Empaque 2009Documento119 páginasIngenieria de Empaque 2009jorgef7.jalAinda não há avaliações
- Diseño de Un Banco para Pruebas de Excentricidad en Ejes de Los Rotores Principales de Helicopteros MedianosDocumento110 páginasDiseño de Un Banco para Pruebas de Excentricidad en Ejes de Los Rotores Principales de Helicopteros Medianosdeltaterra100% (1)
- Plano ItpDocumento1 páginaPlano ItpCarlos Cervantes GalindoAinda não há avaliações
- Servomotores Robótica Arcane Motores ElectricosDocumento92 páginasServomotores Robótica Arcane Motores ElectricosMarcos RojoAinda não há avaliações
- Proyecto Final TELIIDocumento74 páginasProyecto Final TELIISebas VacaAinda não há avaliações
- Economia Cuadernillo 2019Documento96 páginasEconomia Cuadernillo 2019Cryinglikeababy IamAinda não há avaliações
- Maquinas para Transporte de Materiales.Documento68 páginasMaquinas para Transporte de Materiales.Anonymous iiyIrNUn100% (1)
- Insemiación Artificial y Transferencia de EmbrionesDocumento154 páginasInsemiación Artificial y Transferencia de EmbrionesGONZALES CALLE KENDAL EXELL KAYTHLINEAinda não há avaliações
- PELUQUERÍADocumento90 páginasPELUQUERÍAGreen CapacitacionAinda não há avaliações
- Manual RiggerDocumento64 páginasManual RiggerAlejandro Antonio Gutierrez DecidetAinda não há avaliações
- Primeros Auxilios RevisadoDocumento58 páginasPrimeros Auxilios RevisadoIbrain Cayamana CcorimanyaAinda não há avaliações
- 03 PTDI Puerto Villarroel (Cochabamba) 2021-2025Documento243 páginas03 PTDI Puerto Villarroel (Cochabamba) 2021-2025Vladimir VillarroelAinda não há avaliações
- Programa Basico de Direccion de Coros Infantiles 2 PDF FreeDocumento207 páginasPrograma Basico de Direccion de Coros Infantiles 2 PDF FreeDavid Ocampo CiroAinda não há avaliações
- 5-Libro NEUMÁTICADocumento75 páginas5-Libro NEUMÁTICAPabloAinda não há avaliações
- PTDI PUERTO VILLARROEL 2021-2025 (05-Abr-2022)Documento223 páginasPTDI PUERTO VILLARROEL 2021-2025 (05-Abr-2022)Mariana ValverdeAinda não há avaliações
- Operatoia DentalDocumento52 páginasOperatoia DentalMarlo Esteban Linares Mendoza100% (1)
- Puga - Teoría MacroeconómicaDocumento400 páginasPuga - Teoría MacroeconómicaFernando HerreraAinda não há avaliações
- ANÁLISIS - Barroco y Clasicismo PDFDocumento90 páginasANÁLISIS - Barroco y Clasicismo PDFAcid Pérez VeraAinda não há avaliações
- Libro FerDocumento88 páginasLibro FerAlonso CameraAinda não há avaliações
- Plan de Manejo Tipo para Palma ChitDocumento39 páginasPlan de Manejo Tipo para Palma Chitmartin.rodriguezAinda não há avaliações
- Malla Curricular 2019Documento2 páginasMalla Curricular 2019Marco Huaringa DionisioAinda não há avaliações
- Manual de RescateDocumento157 páginasManual de RescateoquirogacAinda não há avaliações
- Manual Plataformas y Barcaza 2018 PDFDocumento87 páginasManual Plataformas y Barcaza 2018 PDFFrancisco CastañedaAinda não há avaliações
- Manual Técnicas QuirurgicasDocumento115 páginasManual Técnicas QuirurgicasLuisa Cardona Zarate100% (2)
- Check List Vehiculos LivianosDocumento1 páginaCheck List Vehiculos Livianosjennifer caballeroAinda não há avaliações
- Elaboracion Alimento A Partir de Larvas de Moscas PDFDocumento167 páginasElaboracion Alimento A Partir de Larvas de Moscas PDFAngélica Lozano CastroAinda não há avaliações
- Manual Del Segundo Modulo 2017Documento90 páginasManual Del Segundo Modulo 2017Juan Carlos100% (2)
- PG 2068Documento172 páginasPG 2068Gustavo TiconaAinda não há avaliações
- 4.6 Manual - de - Imagen - Corporativa 2021Documento80 páginas4.6 Manual - de - Imagen - Corporativa 2021Juan José Contreras ReynaAinda não há avaliações
- Guía de AdministraciónDocumento82 páginasGuía de AdministraciónjgchugchilanmolinaAinda não há avaliações
- PNUD. Informe Técnico de Tipologías de Uso Del Espacio en La Vivienda (2006)Documento152 páginasPNUD. Informe Técnico de Tipologías de Uso Del Espacio en La Vivienda (2006)Lucía SalvatierraAinda não há avaliações
- Maquinas para El Transporte de Maquinarias y Materiales 2Documento81 páginasMaquinas para El Transporte de Maquinarias y Materiales 2jordy alexis olivos chavezAinda não há avaliações
- Manual de Taller Marathon125 ChasisDocumento75 páginasManual de Taller Marathon125 ChasisManuel Correa PerandresAinda não há avaliações
- Taller Cultura Fisica en ExcelDocumento2 páginasTaller Cultura Fisica en Excelstiven zapataAinda não há avaliações
- Lista de Chequeo - Vehiculos Livianos FatigaDocumento5 páginasLista de Chequeo - Vehiculos Livianos Fatigamaykolramirez1753Ainda não há avaliações
- Plan Curricular FAU UNFV 2019Documento1 páginaPlan Curricular FAU UNFV 2019Alexander Alvarado VillanuevaAinda não há avaliações
- Malla Curr 2019Documento2 páginasMalla Curr 2019LuisAinda não há avaliações
- Instructivo Tipologias Constructivas ULTIMODocumento62 páginasInstructivo Tipologias Constructivas ULTIMOJavier Andres Rincon LopezAinda não há avaliações
- Tesis CompletaDocumento110 páginasTesis CompletaYoli GarciaAinda não há avaliações
- 9240 - BELM-16148 (Custodia de Las Prisiones - Echeverry)Documento3 páginas9240 - BELM-16148 (Custodia de Las Prisiones - Echeverry)Fabio Augusto Becerra VeraAinda não há avaliações
- Introduccion A La Balistica ForenseDocumento333 páginasIntroduccion A La Balistica ForenseAndres Felipe Diaz SanchezAinda não há avaliações
- MANUAL DE OPERACIONES - CompreDocumento215 páginasMANUAL DE OPERACIONES - CompreAlexrojaspizarro50% (4)
- Fiei Ing Tel PDocumento1 páginaFiei Ing Tel PManuel ContrerasAinda não há avaliações
- Manual de Aplicación Xypex v0508v2Documento72 páginasManual de Aplicación Xypex v0508v2Roberto ZaldañaAinda não há avaliações
- Instructivo Tipologias Constructivas 2021V02Documento58 páginasInstructivo Tipologias Constructivas 2021V02Johanna PaterninaAinda não há avaliações
- MantenimientoDocumento1 páginaMantenimientoADBEELY HURTADO GARCIAAinda não há avaliações
- MantenimientoDocumento1 páginaMantenimientoADBEELY HURTADO GARCIAAinda não há avaliações
- Marzo 2017 - Mesas Sectoriales y Normas de Competencias Laborales VigentesDocumento641 páginasMarzo 2017 - Mesas Sectoriales y Normas de Competencias Laborales VigentesDiana GonzalezAinda não há avaliações
- El Lenguaje de Programación C#Documento311 páginasEl Lenguaje de Programación C#Jean HuaytaAinda não há avaliações
- Cartilla Interactiva Producción de Documentos PDFDocumento101 páginasCartilla Interactiva Producción de Documentos PDFTatiana PaezAinda não há avaliações
- Master Cerro ColoradoDocumento47 páginasMaster Cerro ColoradojoseAinda não há avaliações
- Resumen IO - PagesDocumento96 páginasResumen IO - PagesJulian PagesAinda não há avaliações
- El Telescopio Del AficionadoDocumento98 páginasEl Telescopio Del AficionadofacherofriskAinda não há avaliações
- Manual MRX ProDocumento52 páginasManual MRX ProJavi CastreAinda não há avaliações
- Reglamento InterDocumento132 páginasReglamento Intercamila.catalanpAinda não há avaliações
- Texereau Jean - El Telescopio Del AficionadoDocumento195 páginasTexereau Jean - El Telescopio Del Aficionadoapi-3770766100% (1)
- Microterritorios: La configuración del límite en el conjunto SoldatiNo EverandMicroterritorios: La configuración del límite en el conjunto SoldatiAinda não há avaliações
- Curso Pedagogía Del ViolínDocumento9 páginasCurso Pedagogía Del ViolínGabriela Isabel Roca MenesesAinda não há avaliações
- La Toponimia Desde La Literatura: Mirada Al Continuum Urbano, Por Yasmina Mendieta GrenaldDocumento7 páginasLa Toponimia Desde La Literatura: Mirada Al Continuum Urbano, Por Yasmina Mendieta GrenaldRaul RodiguezAinda não há avaliações
- Benedicto XVI Cantate Domino Antologia DDocumento37 páginasBenedicto XVI Cantate Domino Antologia DCarlos PérezAinda não há avaliações
- Manipulación y Tratamiento Del VidrioDocumento5 páginasManipulación y Tratamiento Del Vidriocaterine oviedo campoAinda não há avaliações
- GC - N01I - TA1Consigna - 22C1M - TA1 DESARROLLADODocumento9 páginasGC - N01I - TA1Consigna - 22C1M - TA1 DESARROLLADOxiomara balderaAinda não há avaliações
- Act Unidad 2 - KarenvegaDocumento5 páginasAct Unidad 2 - KarenvegaBerenice KäRënAinda não há avaliações
- Procrastinacion Rendimiento AcademicoDocumento18 páginasProcrastinacion Rendimiento AcademicoDianamargoth86 Delgadp TuanamaAinda não há avaliações
- Amor PerformáticoDocumento10 páginasAmor PerformáticoMANUELA GOMEZ ARIASAinda não há avaliações
- Informe Accidente FatalDocumento3 páginasInforme Accidente FatalJuniorMendoza97Ainda não há avaliações
- Historia Clinica NeurologicaDocumento8 páginasHistoria Clinica NeurologicaAbiezer HerreraAinda não há avaliações
- Anlisis Unit. - AlcantarilladoDocumento39 páginasAnlisis Unit. - AlcantarilladoJorge Severino AstudilloAinda não há avaliações
- NEUROEDUCACIONDocumento13 páginasNEUROEDUCACIONYameliMaqueraTiconaAinda não há avaliações
- Cesar Camargo MetodologiawilsonDocumento12 páginasCesar Camargo Metodologiawilsoncacv50100% (3)
- Reunion de La FlotaDocumento2 páginasReunion de La FlotaMaria Beltran HerreraAinda não há avaliações
- Cardiovascular - 1 PDFDocumento17 páginasCardiovascular - 1 PDFFranco MartinezAinda não há avaliações
- Fertilizacion en Banano - TESIS PDFDocumento47 páginasFertilizacion en Banano - TESIS PDFjose cordoba mena100% (1)
- Relatoría de La Mesa de Análisis de Productos de La Enp 3 en ElDocumento4 páginasRelatoría de La Mesa de Análisis de Productos de La Enp 3 en ElMarco TulioAinda não há avaliações
- 2.5.movilizacin y Desmovi-PavimentoDocumento4 páginas2.5.movilizacin y Desmovi-PavimentoWilliams Rodas FloresAinda não há avaliações
- Jan Oblak Ante Una de Sus Entrevistas Más Personales: Entrevista Hecha Por BetwayDocumento2 páginasJan Oblak Ante Una de Sus Entrevistas Más Personales: Entrevista Hecha Por BetwayguillermoAinda não há avaliações
- Temas - AcordesDocumento4 páginasTemas - AcordesdanielcAinda não há avaliações
- Figura RetoricaDocumento12 páginasFigura Retoricataliana mendozavargasAinda não há avaliações
- VeneziaUnica City PassDocumento4 páginasVeneziaUnica City PassMchelle7Ainda não há avaliações
- Vivir El Adviento en FamiliaDocumento16 páginasVivir El Adviento en FamiliaEdilberto Carlos Ramìrez50% (2)
- Art AlternativaspsicoDocumento22 páginasArt AlternativaspsicoEleazar RodríguezAinda não há avaliações
- Eje 3. Entornos VirtualesDocumento10 páginasEje 3. Entornos VirtualesXimena ChaparroAinda não há avaliações
- Información FinalDocumento8 páginasInformación FinalRoxana AscaAinda não há avaliações
- SEMANA 08 - PRACTICA DE CLASE AyudonDocumento13 páginasSEMANA 08 - PRACTICA DE CLASE AyudonFranco JiménezAinda não há avaliações
- Unidad Educativa "Carlos Cisneros" VespDocumento18 páginasUnidad Educativa "Carlos Cisneros" VespJuan pablo Lopez pilatuñaAinda não há avaliações
- Geometria 2Documento15 páginasGeometria 2Maik HBAinda não há avaliações
- Ejercicios de Clase #2Documento1 páginaEjercicios de Clase #2carlosAinda não há avaliações