Você também pode gostar
- MK52 Calculator UM English USADocumento63 páginasMK52 Calculator UM English USAWalter Hugo Fernández75% (4)
- MTH3020Documento21 páginasMTH3020pHysiXAinda não há avaliações
- Level 4 MathematicsDocumento164 páginasLevel 4 MathematicsJason PaungAinda não há avaliações
- Solutions Instructor Manual Chapter 11 Static Force AnalysisDocumento30 páginasSolutions Instructor Manual Chapter 11 Static Force Analysisr_regis91100% (2)
- Animation 1Documento19 páginasAnimation 1Yogita GhumareAinda não há avaliações
- Concept Map SAC 1Documento1 páginaConcept Map SAC 1Kevin LEEAinda não há avaliações
- Scalar and VectorDocumento9 páginasScalar and VectorLynx101Ainda não há avaliações
- Animation PDFDocumento62 páginasAnimation PDFNobi TariumAinda não há avaliações
- White PixelDocumento30 páginasWhite PixelCristián Martínez BocazAinda não há avaliações
- Active Contours, Level Sets, and Image Segmentation: Chunming LiDocumento42 páginasActive Contours, Level Sets, and Image Segmentation: Chunming LiBudi Utami FahnunAinda não há avaliações
- 19 Keyframing PDFDocumento43 páginas19 Keyframing PDFKathakoli duttaAinda não há avaliações
- Animation: Traditional Animation Keyframe Animation Interpolating RotationDocumento23 páginasAnimation: Traditional Animation Keyframe Animation Interpolating RotationSalman KhanAinda não há avaliações
- MAE331Lecture8 PDFDocumento24 páginasMAE331Lecture8 PDFPranav BhardwajAinda não há avaliações
- Lecture 19-Kinematics of A Particle1Documento35 páginasLecture 19-Kinematics of A Particle1Vasanthi ChitturiAinda não há avaliações
- Introduction To Robotics: TextsDocumento17 páginasIntroduction To Robotics: TextsVienNgocQuangAinda não há avaliações
- Quaternions cs520 6upDocumento6 páginasQuaternions cs520 6upzhaodong.liangAinda não há avaliações
- QuaternionDocumento31 páginasQuaternionsairam poosarlaAinda não há avaliações
- Rigid BodyDocumento38 páginasRigid BodyVarunAinda não há avaliações
- Inertial Measurement Units II: Gordon Wetzstein! Stanford University!Documento37 páginasInertial Measurement Units II: Gordon Wetzstein! Stanford University!mAinda não há avaliações
- Navier-Stokes & Flow Simulation: Last Time?Documento5 páginasNavier-Stokes & Flow Simulation: Last Time?PunuAinda não há avaliações
- EGN330 Coastal Wave Mechanics 02Documento32 páginasEGN330 Coastal Wave Mechanics 02chris.moorekrohn8890Ainda não há avaliações
- Sounding Rocket Structural LoadsDocumento17 páginasSounding Rocket Structural LoadsPartha Sarathi DashAinda não há avaliações
- SRM Institute of Science and Technology: 18Mee305T - Finite Element MethodDocumento50 páginasSRM Institute of Science and Technology: 18Mee305T - Finite Element MethodjumkalakaAinda não há avaliações
- Hill Climbing 1st in ClassDocumento32 páginasHill Climbing 1st in Classapi-3705912Ainda não há avaliações
- Tensor Decomp PresentationDocumento9 páginasTensor Decomp PresentationMahbod (Matt) OLFATAinda não há avaliações
- LocalFeatures ImageMatching 0.1haDocumento64 páginasLocalFeatures ImageMatching 0.1haDương Lê HồngAinda não há avaliações
- Mobile Robotics Lecture No. 2Documento61 páginasMobile Robotics Lecture No. 2ZaidKhanAinda não há avaliações
- (Prof. P. L. Read) : Classical MechanicsDocumento20 páginas(Prof. P. L. Read) : Classical Mechanicsosborne kachajeAinda não há avaliações
- Materi 08 VK 2122 2Documento70 páginasMateri 08 VK 2122 2IlhamzAinda não há avaliações
- 03 FeaturesDocumento84 páginas03 FeaturesAnonimo Um WAinda não há avaliações
- BM - Lec 2 - Rigid Body Analysis and Newtons Laws LinearDocumento70 páginasBM - Lec 2 - Rigid Body Analysis and Newtons Laws LinearBhavya PanchalAinda não há avaliações
- Lecture 2Documento48 páginasLecture 2EllieAinda não há avaliações
- 5 AnnDocumento103 páginas5 AnnZaeem AbbasAinda não há avaliações
- Lecture 3Documento31 páginasLecture 3Wolf DragonneAinda não há avaliações
- Math 4 CompetenciesDocumento5 páginasMath 4 CompetenciesRey Almodiel SolitarioAinda não há avaliações
- ME 101-Lecture 22-25-Kinematics of A ParticleDocumento66 páginasME 101-Lecture 22-25-Kinematics of A Particlesm737744Ainda não há avaliações
- Feature Matching: "What Stuff in The Left Image Matches With Stuff On The Right?"Documento62 páginasFeature Matching: "What Stuff in The Left Image Matches With Stuff On The Right?"Lim Yoong KangAinda não há avaliações
- ENS 162 Lecture 1 Kinematics of ParticlesDocumento32 páginasENS 162 Lecture 1 Kinematics of Particlesmontenegro.christianAinda não há avaliações
- CS4670: Computer Vision: Lecture 5: Feature Detection and MatchingDocumento46 páginasCS4670: Computer Vision: Lecture 5: Feature Detection and MatchingDanni LeAinda não há avaliações
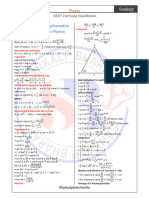
- Physics Formula HandbookDocumento54 páginasPhysics Formula Handbook3198chethaAinda não há avaliações
- Lecture 6Documento32 páginasLecture 6Muhammad Usama Bin TahirAinda não há avaliações
- 18 SL Regression 1 320E F21Documento40 páginas18 SL Regression 1 320E F21Austin PhamAinda não há avaliações
- Structural Dynamics - 10-301121Documento16 páginasStructural Dynamics - 10-301121santoshAinda não há avaliações
- Physics-Based Simulation: Graphics and Robotics: Chand T. JohnDocumento26 páginasPhysics-Based Simulation: Graphics and Robotics: Chand T. JohnWaqas ZafarAinda não há avaliações
- 6 Stability of Discrete-Time Systems - CompleteDocumento40 páginas6 Stability of Discrete-Time Systems - CompleteIvan IndirsyahAinda não há avaliações
- Chapter 11Documento49 páginasChapter 11je steanAinda não há avaliações
- CH 09Documento52 páginasCH 09RayanAinda não há avaliações
- Mobile Computer Vision: Optical Flow and TrackingDocumento55 páginasMobile Computer Vision: Optical Flow and Trackingpradeep BAinda não há avaliações
- Ik PDFDocumento30 páginasIk PDFRama SubramanianAinda não há avaliações
- Null 2Documento29 páginasNull 2Samaseen PrabhatAinda não há avaliações
- ME303 Wk02 Kinematics Load Determination PDFDocumento23 páginasME303 Wk02 Kinematics Load Determination PDF许戎汉Ainda não há avaliações
- Harmonic Oscillations by Arghya Chatterjee Part 3Documento42 páginasHarmonic Oscillations by Arghya Chatterjee Part 3Samaseen PrabhatAinda não há avaliações
- Image&Registra, On&based&on& Feature&matchingDocumento63 páginasImage&Registra, On&based&on& Feature&matchinglaura torresAinda não há avaliações
- Kinematics of Rigid Bodies: Prepared By: Engr. Dezirre PadillaDocumento13 páginasKinematics of Rigid Bodies: Prepared By: Engr. Dezirre PadillaAndrew TorioAinda não há avaliações
- 3D Kinematics: Presented By: Amir Patel PHD (Mechatronics) Cape TownDocumento32 páginas3D Kinematics: Presented By: Amir Patel PHD (Mechatronics) Cape TownDaniel JonesAinda não há avaliações
- Chapter 1Documento70 páginasChapter 1haulam leeAinda não há avaliações
- 6 Three D AnimationDocumento39 páginas6 Three D Animationnav122Ainda não há avaliações
- Chapter 12 Kinematics of A ParticleDocumento86 páginasChapter 12 Kinematics of A ParticleDawood AbdullahAinda não há avaliações
- Lecture 20 - Angular Momentum Quantization (Mostly) Chapter 11.8 - 11.11Documento20 páginasLecture 20 - Angular Momentum Quantization (Mostly) Chapter 11.8 - 11.11Arnab MondalAinda não há avaliações
- Local Search and OptimizationDocumento28 páginasLocal Search and OptimizationMazharulislamAinda não há avaliações
- Feature Matching and RANSAC: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005Documento36 páginasFeature Matching and RANSAC: 15-463: Computational Photography Alexei Efros, CMU, Fall 2005shaguftahumaAinda não há avaliações
- Vector Algebra and Calculus: Stephen RobertsDocumento36 páginasVector Algebra and Calculus: Stephen RobertsRoselle AnireAinda não há avaliações
- Easy Rivision For NeetDocumento54 páginasEasy Rivision For NeetRaja420Ainda não há avaliações
- A First Course in Rational Continuum Mechanics V1No EverandA First Course in Rational Continuum Mechanics V1Ainda não há avaliações
- An Extension of The Finite Hankel TransformsDocumento21 páginasAn Extension of The Finite Hankel TransformsMohammad ZaeimiAinda não há avaliações
- 2-05-20 - SR - IIT - N-SUPER CHAINA&N-CHAINA - Jee-Main - GTM-17 - QPDocumento14 páginas2-05-20 - SR - IIT - N-SUPER CHAINA&N-CHAINA - Jee-Main - GTM-17 - QPIshanAinda não há avaliações
- PythonTutorial MCSC 202Documento39 páginasPythonTutorial MCSC 202BinoAinda não há avaliações
- Mathematics GR 12 P2 1 TrigonometryDocumento140 páginasMathematics GR 12 P2 1 TrigonometryphiwoAinda não há avaliações
- ANTON - HOWARD A. Vol1 - Testes Suplementares Com Resposta IDocumento189 páginasANTON - HOWARD A. Vol1 - Testes Suplementares Com Resposta Ilexoing74020% (1)
- Circles: Grade 10Documento12 páginasCircles: Grade 10Leby FastidioAinda não há avaliações
- Angle Relationships in CirclesDocumento7 páginasAngle Relationships in CirclesPristine CharlesAinda não há avaliações
- Novel Calculation Method For Chain Conveyor Systems: Jens Sumpf, Hagen Bankwitz Klaus NendelDocumento12 páginasNovel Calculation Method For Chain Conveyor Systems: Jens Sumpf, Hagen Bankwitz Klaus NendelhbookAinda não há avaliações
- As & A Level Further Mathematics 2014 SyllabusDocumento30 páginasAs & A Level Further Mathematics 2014 SyllabusShawnAinda não há avaliações
- MATLAB - Programming With MATLAB For BeginnersDocumento113 páginasMATLAB - Programming With MATLAB For Beginnersc_mc2100% (3)
- NCERT Solutions For Class 11 Maths Chapter 3 Trigonometric Functions Exercise 3.3Documento20 páginasNCERT Solutions For Class 11 Maths Chapter 3 Trigonometric Functions Exercise 3.3thanujloganathanAinda não há avaliações
- Binary Offset Carrier (BOC)Documento18 páginasBinary Offset Carrier (BOC)ninnnnnnimoAinda não há avaliações
- Test Technician (2774) PDFDocumento323 páginasTest Technician (2774) PDFsubyAinda não há avaliações
- Laplace ProblemsDocumento41 páginasLaplace ProblemsduchesschloeAinda não há avaliações
- 10th IMP PracticeDocumento9 páginas10th IMP Practicevsurender reddyAinda não há avaliações
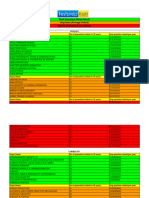
- TestprepKart JEE Mains Last 10 Years Weightage AnalysisDocumento4 páginasTestprepKart JEE Mains Last 10 Years Weightage AnalysispremsamarthyaAinda não há avaliações
- (Mrigank) Assignment4 Questions On Heat EquationDocumento5 páginas(Mrigank) Assignment4 Questions On Heat EquationMrigankAinda não há avaliações
- Sine-And-Cosine-Rules 3Documento10 páginasSine-And-Cosine-Rules 3Farzad FarhadAinda não há avaliações
- 4 Solving Triangles Handout FlowchartDocumento2 páginas4 Solving Triangles Handout FlowchartReginald Lopez100% (1)
- Alg 2 SgiDocumento200 páginasAlg 2 SgiKevin Florestal100% (12)
- Activity 9: 1. Take A Stand Fitted With 0º-360º Protractor. 2. Consider The Radius of Protractor As 1 UnitDocumento3 páginasActivity 9: 1. Take A Stand Fitted With 0º-360º Protractor. 2. Consider The Radius of Protractor As 1 UnitTrupti prangya sahooAinda não há avaliações
- FSC114 Grouping1Documento3 páginasFSC114 Grouping1Kenneth SilvaAinda não há avaliações
- Mathematics CG 2023Documento66 páginasMathematics CG 2023Jhie Jhie LimpagAinda não há avaliações
- 430 4 1 Mathematics (Basic)Documento19 páginas430 4 1 Mathematics (Basic)Zara KAinda não há avaliações
- Jhun JhunDocumento7 páginasJhun Jhunjhunjhun ricablancaAinda não há avaliações
- Physics - FiedalanDocumento115 páginasPhysics - Fiedalanjarromeo jacaAinda não há avaliações