Você também pode gostar
- Jaw Crusher Review Kinematic Dynamic AnalysisDocumento4 páginasJaw Crusher Review Kinematic Dynamic AnalysisRagab AbulmagdAinda não há avaliações
- Final Report - STONE CRUSHERDocumento71 páginasFinal Report - STONE CRUSHERneusonAinda não há avaliações
- Jaw CrusherDocumento4 páginasJaw CrusherRebekah HaleAinda não há avaliações
- Nawapactor VsiDocumento4 páginasNawapactor Vsichand_yel100% (2)
- Purchased Part Specification: Extended DescriptionDocumento1 páginaPurchased Part Specification: Extended DescriptionWilliam VillamizarAinda não há avaliações
- Trio - Group Washers LogDocumento4 páginasTrio - Group Washers LogCemYurtseverAinda não há avaliações
- Deepak Project On Jaw CrusherDocumento96 páginasDeepak Project On Jaw CrusherAnil Kumar KnAinda não há avaliações
- Gyratory Mill: EccentricDocumento10 páginasGyratory Mill: EccentricAbhishek Kumar100% (1)
- Industrial Solutions Jaw Crushers: Crushing Made EasyDocumento7 páginasIndustrial Solutions Jaw Crushers: Crushing Made EasyFernando MilmanAinda não há avaliações
- The MP2500: The Largest Cone Crusher Ever Built: Materials Handling and LogisticsDocumento1 páginaThe MP2500: The Largest Cone Crusher Ever Built: Materials Handling and LogisticsDiegoAlvarezHuguezAinda não há avaliações
- Cone Ranger: Mobile Cone Crushing UnitsDocumento2 páginasCone Ranger: Mobile Cone Crushing UnitsYousef AlipourAinda não há avaliações
- Excel Tramp Release System Upgrade For HP700 and HP800 Cone CrushersDocumento2 páginasExcel Tramp Release System Upgrade For HP700 and HP800 Cone CrushersCarlos Andres Maldonado ArdilesAinda não há avaliações
- Vertical Shaft Impactor - Sand Making MachineDocumento37 páginasVertical Shaft Impactor - Sand Making Machineaaronshakti100% (1)
- Jaw Crushers and Disk Mills: FritschDocumento20 páginasJaw Crushers and Disk Mills: FritschAnil Kumar KnAinda não há avaliações
- Sandvik UH320 Specification SummaryDocumento2 páginasSandvik UH320 Specification SummaryRicardo E Andrea RachelAinda não há avaliações
- Project Case - CT4254 JAW PLATESDocumento4 páginasProject Case - CT4254 JAW PLATESNicole WuAinda não há avaliações
- CEDARAPIDS (2015) - Quality Paving Guide BookDocumento96 páginasCEDARAPIDS (2015) - Quality Paving Guide BookRodrigo DíazAinda não há avaliações
- Jaw Crusher Daily Inspection FormDocumento6 páginasJaw Crusher Daily Inspection FormjlfyAinda não há avaliações
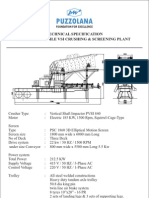
- Tertiary VSI Mobile PlantDocumento1 páginaTertiary VSI Mobile PlantPuzzolana Foundation For ExcellanceAinda não há avaliações
- Jaw Crusher Kinematics Simulation and AnalysisDocumento5 páginasJaw Crusher Kinematics Simulation and AnalysisInternational Journal of Research in Engineering and ScienceAinda não há avaliações
- Uranium Corporation of India Limited P.O: Jaduguda Mines, Jharkhand - 832102Documento4 páginasUranium Corporation of India Limited P.O: Jaduguda Mines, Jharkhand - 832102arsanioseAinda não há avaliações
- Mobile Jaw Crusher PDFDocumento7 páginasMobile Jaw Crusher PDFNguyễn LinhAinda não há avaliações
- Ubc 2003-0537Documento163 páginasUbc 2003-0537Lmf DanielAinda não há avaliações
- CrawlerMobileCrusher SDocumento7 páginasCrawlerMobileCrusher Sjoyalcrusher100% (1)
- The Basic Principle of A Cone Crusher Is Depicted in Figure 9 and Described HereDocumento1 páginaThe Basic Principle of A Cone Crusher Is Depicted in Figure 9 and Described HereKudzie Maphy MasaireAinda não há avaliações
- 1238 Jaw Crusher PDFDocumento12 páginas1238 Jaw Crusher PDFRasoolKhadibiAinda não há avaliações
- Size Control: - Screening Using A Geometrical Pattern For Size ControlDocumento5 páginasSize Control: - Screening Using A Geometrical Pattern For Size ControlSergei DumrovaAinda não há avaliações
- Hydraulic Cone Crusher PDFDocumento16 páginasHydraulic Cone Crusher PDFJanethDeNunuraAinda não há avaliações
- Vibrating Screens - Circular Motion Rev 1Documento2 páginasVibrating Screens - Circular Motion Rev 1Ziggy Gregory100% (1)
- TBK 80 (Ø850) Rock-On-Rock Vsi Crusher Operation and Maintenance ManualDocumento44 páginasTBK 80 (Ø850) Rock-On-Rock Vsi Crusher Operation and Maintenance ManualIruna HupaloAinda não há avaliações
- Wmd0976 Trio Tc66 Series Cone Crusher Spec SheetDocumento2 páginasWmd0976 Trio Tc66 Series Cone Crusher Spec SheetYang Wan100% (1)
- Hard Rock Crushing PlantDocumento4 páginasHard Rock Crushing PlantErikAinda não há avaliações
- SG 120 CrusherDocumento2 páginasSG 120 Crusherlandago100% (1)
- Washing and Classifying Brochure EnglishDocumento24 páginasWashing and Classifying Brochure EnglishMohammed Alshami GeologistAinda não há avaliações
- Vsi 2Documento9 páginasVsi 2Vivek AgrawalAinda não há avaliações
- Cone Crusher SBMDocumento3 páginasCone Crusher SBMOrlando Melipillan100% (1)
- Unicast Datasheet Jaw Crusher Wear Parts PDFDocumento2 páginasUnicast Datasheet Jaw Crusher Wear Parts PDFramonguitAinda não há avaliações
- Systems: WashingDocumento6 páginasSystems: WashingVinAinda não há avaliações
- Mobile granite crushing plant 150t/hDocumento4 páginasMobile granite crushing plant 150t/hSolomon MiAinda não há avaliações
- 8r77r-Cybas I ConeDocumento6 páginas8r77r-Cybas I Coneturkishdjem100% (1)
- RAPTOR Cone CrusherDocumento4 páginasRAPTOR Cone CrusherLuis Miguel La TorreAinda não há avaliações
- Crushing Plant For Sale1Documento18 páginasCrushing Plant For Sale1Vicky NonatoAinda não há avaliações
- F Class Tech SpecsDocumento8 páginasF Class Tech SpecskosmcAinda não há avaliações
- FG-Spiral Classifier Operating ManualDocumento5 páginasFG-Spiral Classifier Operating ManualRogelio Israel LedesmaAinda não há avaliações
- Optimization of crushing stage using on-line speed regulation on cone crushersDocumento9 páginasOptimization of crushing stage using on-line speed regulation on cone crushersRagab AbulmagdAinda não há avaliações
- En Hammer CrushersDocumento3 páginasEn Hammer CrusherspeymanAinda não há avaliações
- Crusher Plant: Machine Rocks Gravel TangentDocumento3 páginasCrusher Plant: Machine Rocks Gravel Tangentanil kumarAinda não há avaliações
- RollSizers crush materials with low-height technologyDocumento5 páginasRollSizers crush materials with low-height technologyIrvanda ZiaurrahmanAinda não há avaliações
- Horizontal Shaft Impact CrusherDocumento13 páginasHorizontal Shaft Impact CrusherAnonymous NxpnI6jCAinda não há avaliações
- Exciter Vibrating FeederDocumento5 páginasExciter Vibrating Feedergopi_ggg20016099Ainda não há avaliações
- Guangxi Crukings Machinery Equipment Co., Ltd. ProfileDocumento26 páginasGuangxi Crukings Machinery Equipment Co., Ltd. ProfileJake HuangAinda não há avaliações
- Screen Instruction Operating Manual Incl GADocumento26 páginasScreen Instruction Operating Manual Incl GAKudzie Maphy MasaireAinda não há avaliações
- WO 2014/075722 Al: International BureauDocumento17 páginasWO 2014/075722 Al: International BureauneusonAinda não há avaliações
- QMS - General BrochureDocumento6 páginasQMS - General BrochureArpit VermaAinda não há avaliações
- Screw Washer A 01Documento15 páginasScrew Washer A 01joule357Ainda não há avaliações
- Mvgh1360-E GrizlyDocumento18 páginasMvgh1360-E GrizlyMartín Lescano ParedesAinda não há avaliações
- 2015.04.10, Manual of Hydraulic SystemDocumento83 páginas2015.04.10, Manual of Hydraulic SystemVikram SinghAinda não há avaliações
- Computer Aided Design and Analysis of Swing Jaw Plate of Jaw CrusherDocumento103 páginasComputer Aided Design and Analysis of Swing Jaw Plate of Jaw CrusherAmir HzmAinda não há avaliações
- Jaw Crusher ForcesDocumento16 páginasJaw Crusher ForcesSudipta GangopadhyayAinda não há avaliações
- Analysis of The Single Toggle Jaw Crusher KinematicsDocumento36 páginasAnalysis of The Single Toggle Jaw Crusher KinematicsCarlos Ediver Arias RestrepoAinda não há avaliações
- Computer Basics Study GuideDocumento11 páginasComputer Basics Study GuidePrerak DedhiaAinda não há avaliações
- MECANIQUE - Construction Practice Onshore SteelDocumento54 páginasMECANIQUE - Construction Practice Onshore SteelYaser ShabasyAinda não há avaliações
- Learn TagalogDocumento11 páginasLearn TagalogShim CharenAinda não há avaliações
- Bengali Ebook 191011Documento3 páginasBengali Ebook 191011bhaskar2000_inAinda não há avaliações
- 232 SpdaDocumento4 páginas232 SpdaGerard Sierr BarboAinda não há avaliações
- RFPO55 G.8263: SpecificationsDocumento5 páginasRFPO55 G.8263: SpecificationsullascsAinda não há avaliações
- Deploying Openssh On Aix: Before You StartDocumento14 páginasDeploying Openssh On Aix: Before You Startch herlinAinda não há avaliações
- X28HC256Documento25 páginasX28HC256schwagerino100% (1)
- DemodulatorsDocumento2 páginasDemodulatorskhalidAinda não há avaliações
- B - E / B - T E C H (Full-Time) D E G R E E Examinations, April/May 2012Documento2 páginasB - E / B - T E C H (Full-Time) D E G R E E Examinations, April/May 2012krithikgokul selvamAinda não há avaliações
- IEEE Recommended Guide For Measuring Ground Resistance and Potential Gradients in The EarthDocumento20 páginasIEEE Recommended Guide For Measuring Ground Resistance and Potential Gradients in The Earthkimjohn dejesusAinda não há avaliações
- 1 s2.0 S2352012421001156 MainDocumento14 páginas1 s2.0 S2352012421001156 MainBayuAgungGilangWibowoAinda não há avaliações
- The 2 - Generation Audi Space Frame of The A2: A Trendsetting All-Aluminium Car Body Concept in A Compact Class CarDocumento5 páginasThe 2 - Generation Audi Space Frame of The A2: A Trendsetting All-Aluminium Car Body Concept in A Compact Class CarKld AliAinda não há avaliações
- Simple HTTP Client for Reading RSS Feeds on MobileDocumento6 páginasSimple HTTP Client for Reading RSS Feeds on MobileMarcel LefterAinda não há avaliações
- Thermal Performance AnalysisDocumento23 páginasThermal Performance AnalysisLiew Yau WeiAinda não há avaliações
- 03-12-20 OI A5 EnglishDocumento24 páginas03-12-20 OI A5 EnglishPrabhakar BandaruAinda não há avaliações
- Composite Materials For Civil Engineering Structures US Army Corps of EngineersDocumento66 páginasComposite Materials For Civil Engineering Structures US Army Corps of EngineersRicardo AlfaroAinda não há avaliações
- Entry Test Preparation Test No.2 (ECAT)Documento3 páginasEntry Test Preparation Test No.2 (ECAT)NAEEM UR REHMANAinda não há avaliações
- Pandora 5000L Pro ManualDocumento64 páginasPandora 5000L Pro ManualAndrei DimaAinda não há avaliações
- NFL Players ReportDocumento4 páginasNFL Players ReportYawar Ali0% (1)
- Iron Carbon Diagram 6Documento15 páginasIron Carbon Diagram 6Harris DarAinda não há avaliações
- MATLAB Image Processing Toolbox Basic IntroductionDocumento10 páginasMATLAB Image Processing Toolbox Basic IntroductionHilbertAinda não há avaliações
- How To Operate BlenderDocumento1 páginaHow To Operate BlenderMang Aip RezpectorSejatiAinda não há avaliações
- College Department Course: B.E Course Code 18CSL67 Student Name USN Mini Project Title Under Taken at Internal Guide SynopsisDocumento3 páginasCollege Department Course: B.E Course Code 18CSL67 Student Name USN Mini Project Title Under Taken at Internal Guide Synopsismohit kunduAinda não há avaliações
- 4th Quarter Long Quiz in ScienceDocumento2 páginas4th Quarter Long Quiz in ScienceEderlina Bentilanon FagtananAinda não há avaliações
- Math 7-Q4-Module-3Documento16 páginasMath 7-Q4-Module-3Jeson GaiteraAinda não há avaliações
- 01-An Approach To Improved CNC Machining Using Vision-Based SystemDocumento11 páginas01-An Approach To Improved CNC Machining Using Vision-Based SystemCătălina StahurschiAinda não há avaliações
- Title of MagazineDocumento55 páginasTitle of MagazineJAMILAH JAVIER ORTIZAinda não há avaliações
- COmplete CDocumento335 páginasCOmplete Cdeep11680Ainda não há avaliações
- Computer Architecture Project 2: Understanding Gem5 Branch Predictor StructureDocumento5 páginasComputer Architecture Project 2: Understanding Gem5 Branch Predictor StructureAsif MalikAinda não há avaliações