Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- cs386 - Notes 7Documento13 páginascs386 - Notes 7sharmanator99Ainda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Pset 3Documento3 páginasPset 3sharmanator99Ainda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Dis 1H - Week 4Documento21 páginasDis 1H - Week 4sharmanator99Ainda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (894)
- Bio HWDocumento1 páginaBio HWsharmanator99Ainda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- EE M16 Problem Set 1Documento8 páginasEE M16 Problem Set 1sharmanator99Ainda não há avaliações
- Some Things About StringsDocumento2 páginasSome Things About Stringssharmanator99Ainda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- MATH 52, FALL 2007 - SOLUTIONS TO HOMEWORK 6Documento4 páginasMATH 52, FALL 2007 - SOLUTIONS TO HOMEWORK 6sharmanator99Ainda não há avaliações
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Digital Morse Code Decoder Design Lab 1Documento4 páginasDigital Morse Code Decoder Design Lab 1sharmanator99Ainda não há avaliações
- Arithmetic and Logical OperationsDocumento20 páginasArithmetic and Logical OperationsAmna IqbalAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- 11 U3 Ws 4Documento2 páginas11 U3 Ws 4sharmanator99Ainda não há avaliações
- Annotated BibliographyDocumento2 páginasAnnotated Bibliographysharmanator99Ainda não há avaliações
- WS 1.3 solutions acceleration distance speed problemsDocumento2 páginasWS 1.3 solutions acceleration distance speed problemssharmanator99Ainda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Exam1practicesolutions PDFDocumento4 páginasExam1practicesolutions PDFAyah Al-AnaniAinda não há avaliações
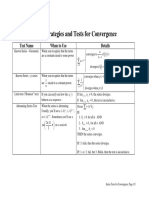
- Series Strategies and Tests For Convergence: Test Name When To Use DetailsDocumento3 páginasSeries Strategies and Tests For Convergence: Test Name When To Use Detailssharmanator99Ainda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Project 4 Test DataDocumento5 páginasProject 4 Test Datasharmanator99Ainda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Final Exam Cheat SheetDocumento3 páginasFinal Exam Cheat Sheetsharmanator99Ainda não há avaliações
- Math 32a Homework 3Documento1 páginaMath 32a Homework 3sharmanator99Ainda não há avaliações
- CS31 Code ExamplesDocumento1 páginaCS31 Code Examplessharmanator99Ainda não há avaliações
- Tests for Convergence and Divergence of SeriesDocumento1 páginaTests for Convergence and Divergence of Seriessharmanator99Ainda não há avaliações
- ACM RefguideDocumento3 páginasACM RefguideJorge MaldonadoAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Philanthropy Project - Indian Army Veteran InitiativeDocumento4 páginasPhilanthropy Project - Indian Army Veteran Initiativesharmanator99Ainda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- Post LabDocumento1 páginaPost Labsharmanator99Ainda não há avaliações
- Statistics Chapter 4 Notes Section 4.1 Designing Studies: Definition: Population and SampleDocumento6 páginasStatistics Chapter 4 Notes Section 4.1 Designing Studies: Definition: Population and Samplesharmanator99Ainda não há avaliações
- Debate Genderless ChildDocumento2 páginasDebate Genderless Childsharmanator99Ainda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Debate Genderless ChildDocumento2 páginasDebate Genderless Childsharmanator99Ainda não há avaliações
- Orwell Rhetorical PrecisDocumento1 páginaOrwell Rhetorical Precissharmanator99Ainda não há avaliações
- Presentation On Indira GandhiDocumento9 páginasPresentation On Indira Gandhisharmanator99Ainda não há avaliações
- Assg 03 1Documento7 páginasAssg 03 1Abdul ShakoorAinda não há avaliações
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Winitzki - Heidelberg Lectures On Advanced General Relativity 2007Documento156 páginasWinitzki - Heidelberg Lectures On Advanced General Relativity 2007winitzkiAinda não há avaliações
- The Theory of Engineering DrawingDocumento370 páginasThe Theory of Engineering Drawingcocotess100% (1)
- Total Chloride in Alumina Supported Catalysts by Wavelength Dispersive X-Ray FluorescenceDocumento5 páginasTotal Chloride in Alumina Supported Catalysts by Wavelength Dispersive X-Ray FluorescenceJesus Gonzalez GracidaAinda não há avaliações
- Curriculum-Of Mathematics Government College Women University, SialkotDocumento119 páginasCurriculum-Of Mathematics Government College Women University, SialkotHuzaifa GurmaniAinda não há avaliações
- SABIC Innovative Plastics Lexan® 940 PC Data SheetDocumento3 páginasSABIC Innovative Plastics Lexan® 940 PC Data SheetMRC RailAinda não há avaliações
- Making and Curing Concrete Test Specimens in The Laboratory: Standard Practice ForDocumento8 páginasMaking and Curing Concrete Test Specimens in The Laboratory: Standard Practice ForAhmed AbidAinda não há avaliações
- Bosch L Jetronic Injection Technical Instructions PDFDocumento40 páginasBosch L Jetronic Injection Technical Instructions PDFjorge Angel LopeAinda não há avaliações
- Department of Education: Humss 12 Cluster A and B Weekly Home Learning PlanDocumento3 páginasDepartment of Education: Humss 12 Cluster A and B Weekly Home Learning PlanRhomelyn AbellarAinda não há avaliações
- Bradford AssayDocumento2 páginasBradford AssayCAinda não há avaliações
- Avr GeneralDocumento67 páginasAvr GeneralRukma Goud Shakkari100% (2)
- Basic ShapesDocumento11 páginasBasic Shapeschristopher templar100% (1)
- 2130606Documento24 páginas2130606srinivasan venkatramanAinda não há avaliações
- Quatitative Microscopy Cog PDFDocumento6 páginasQuatitative Microscopy Cog PDFNiyati GuptaAinda não há avaliações
- McCabe-Thiele Diagrams For Binary DistillationDocumento8 páginasMcCabe-Thiele Diagrams For Binary DistillationwetcoAinda não há avaliações
- SI Analysis: The Second Generation of Flow Injection TechniquesDocumento2 páginasSI Analysis: The Second Generation of Flow Injection TechniquesRu Z KiAinda não há avaliações
- Distribution System HandbookDocumento346 páginasDistribution System HandbookAyan Mandal100% (2)
- Thermal Engineering PDFDocumento76 páginasThermal Engineering PDFKartik KuriAinda não há avaliações
- D V V U: T A.II.i.4. M P BS 1178Documento4 páginasD V V U: T A.II.i.4. M P BS 1178ShubhamRanjanAinda não há avaliações
- Measuring Elastic Modulus of Beams Using Deflection MethodDocumento14 páginasMeasuring Elastic Modulus of Beams Using Deflection MethodHaziq PazliAinda não há avaliações
- NTMM LAB: MATERIAL REMOVAL RATE TEST ON ULTRASONIC MACHINEDocumento23 páginasNTMM LAB: MATERIAL REMOVAL RATE TEST ON ULTRASONIC MACHINETarundeep SinghAinda não há avaliações
- Mohit SIR LATEST Notes (GATE+ESE-2020) )Documento5 páginasMohit SIR LATEST Notes (GATE+ESE-2020) )Vipul MetaAinda não há avaliações
- WRC 538 PDFDocumento27 páginasWRC 538 PDFsoojin gu25% (4)
- Gate Solved Paper - Me: y X X X P P P P X FX A B V Ydx P y X A B V XDX P XDX PDocumento33 páginasGate Solved Paper - Me: y X X X P P P P X FX A B V Ydx P y X A B V XDX P XDX PHarish Jahan MohanAinda não há avaliações
- Electrical and Optical Properties of Indium-Tin Oxide (ITO) Films by Ion-Assisted Deposition (IAD) at Room TemperatureDocumento6 páginasElectrical and Optical Properties of Indium-Tin Oxide (ITO) Films by Ion-Assisted Deposition (IAD) at Room Temperaturereza mirzakhaniAinda não há avaliações
- Cup Making MachineDocumento3 páginasCup Making MachineJournalNX - a Multidisciplinary Peer Reviewed JournalAinda não há avaliações
- Air Preheater Technical PaperDocumento21 páginasAir Preheater Technical Paperchekoti koushikAinda não há avaliações
- Conversion RPM G CentrifugaDocumento1 páginaConversion RPM G CentrifugaEsaú E RodriguezAinda não há avaliações
- P7 Revision QuestionsDocumento4 páginasP7 Revision Questionsapi-27344426Ainda não há avaliações
- A Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormNo EverandA Mathematician's Lament: How School Cheats Us Out of Our Most Fascinating and Imaginative Art FormNota: 5 de 5 estrelas5/5 (5)
- Quantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsNo EverandQuantum Physics: A Beginners Guide to How Quantum Physics Affects Everything around UsNota: 5 de 5 estrelas5/5 (2)
- Mental Math Secrets - How To Be a Human CalculatorNo EverandMental Math Secrets - How To Be a Human CalculatorNota: 5 de 5 estrelas5/5 (3)