Você também pode gostar
- Differential Equations.-SOLUTIONSDocumento33 páginasDifferential Equations.-SOLUTIONSAllan Michael MamuadAinda não há avaliações
- Motion Physics KinematicsDocumento96 páginasMotion Physics KinematicsMadhurima MaityAinda não há avaliações
- CAPE Pure Math Unit 1 2008-14Documento78 páginasCAPE Pure Math Unit 1 2008-14kesna100% (6)
- (Naval Education Training Center) Mathematics - (BookFi) PDFDocumento386 páginas(Naval Education Training Center) Mathematics - (BookFi) PDFPresley AbrauAinda não há avaliações
- The Pyramid The Truth 1Documento219 páginasThe Pyramid The Truth 1Antony Jebaraj100% (8)
- 2014 H2 Maths Prelim Papers - TPJC P1 Solution PDFDocumento18 páginas2014 H2 Maths Prelim Papers - TPJC P1 Solution PDFcherylhzyAinda não há avaliações
- Epsilon Delta ProofsDocumento16 páginasEpsilon Delta Proofsmcamazigh100% (1)
- MITOCW - MITRES - 18-007 - Part3 - Lec6 - 300k.mp4: ProfessorDocumento12 páginasMITOCW - MITRES - 18-007 - Part3 - Lec6 - 300k.mp4: Professorgaur1234Ainda não há avaliações
- MITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: ProfessorDocumento12 páginasMITOCW - MITRES - 18-007 - Part3 - Lec5 - 300k.mp4: Professorfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part3 - Lec4 - 300k.mp4: Herbert GrossDocumento15 páginasMITOCW - MITRES - 18-007 - Part3 - Lec4 - 300k.mp4: Herbert Grossfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part2 - Lec1 - 300k.mp4: ProfessorDocumento16 páginasMITOCW - MITRES - 18-007 - Part2 - Lec1 - 300k.mp4: Professorfrank_grimesAinda não há avaliações
- Lecture 00 Math ReviewDocumento23 páginasLecture 00 Math Reviewmhanna9562Ainda não há avaliações
- F 9 XFM8 YLccgDocumento19 páginasF 9 XFM8 YLccgTheoAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part4 - Lec1 - 300k.mp4: Herbert GrossDocumento18 páginasMITOCW - MITRES - 18-007 - Part4 - Lec1 - 300k.mp4: Herbert Grossgaur1234Ainda não há avaliações
- MITOCW - MITRES - 18-007 - Part3 - Lec3 - 300k.mp4: ProfessorDocumento13 páginasMITOCW - MITRES - 18-007 - Part3 - Lec3 - 300k.mp4: Professorfrank_grimesAinda não há avaliações
- MITOCW - Ocw-18-01-F07-Lec15 - 300k: ProfessorDocumento9 páginasMITOCW - Ocw-18-01-F07-Lec15 - 300k: Professornk4everAinda não há avaliações
- MITOCW - Watch?v NN2txluv1PY: ProfessorDocumento31 páginasMITOCW - Watch?v NN2txluv1PY: ProfessorJoØrsh Ênrique Tu Xikytø NînîØflowAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part4 - Lec5 - 300k.mp4: Herbert GrossDocumento15 páginasMITOCW - MITRES - 18-007 - Part4 - Lec5 - 300k.mp4: Herbert Grossgaur1234Ainda não há avaliações
- MITOCW - MITRES - 18-007 - Part3 - Lec1 - 300k.mp4: Herbert GrossDocumento13 páginasMITOCW - MITRES - 18-007 - Part3 - Lec1 - 300k.mp4: Herbert Grossfrank_grimesAinda não há avaliações
- IntegrationDocumento10 páginasIntegrationProsper DibakoaneAinda não há avaliações
- 11 Partial Derivatives and Multivariable Chain Rule: 11.1 Basic Defintions and The Increment TheoremDocumento10 páginas11 Partial Derivatives and Multivariable Chain Rule: 11.1 Basic Defintions and The Increment TheoremRomero JuniorAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part4 - Lec4 - 300k.mp4: ProfessorDocumento11 páginasMITOCW - MITRES - 18-007 - Part4 - Lec4 - 300k.mp4: Professorgaur1234Ainda não há avaliações
- MITOCW - Ocw-18-01-F07-Lec01 - 300k: ProfessorDocumento11 páginasMITOCW - Ocw-18-01-F07-Lec01 - 300k: ProfessorMuhammad AzamAinda não há avaliações
- Functional Analysis Prof. P. D. Srivastava Department of Mathematics Indian Institute of Technology, KharagpurDocumento15 páginasFunctional Analysis Prof. P. D. Srivastava Department of Mathematics Indian Institute of Technology, KharagpurKofi Appiah-DanquahAinda não há avaliações
- PEE - Lesson 2Documento2 páginasPEE - Lesson 2Nathaniel NapayAinda não há avaliações
- Return To My Mathematics PagesDocumento2 páginasReturn To My Mathematics Pagesvergin12345Ainda não há avaliações
- 26Documento12 páginas26VivekRouthAinda não há avaliações
- QdbkvD4N UsDocumento17 páginasQdbkvD4N UsTheoAinda não há avaliações
- Instructor (Brad Osgood) :that Was Quick. Looks Like The Crowd's A Little Thin Out ThereDocumento13 páginasInstructor (Brad Osgood) :that Was Quick. Looks Like The Crowd's A Little Thin Out ThereElisée NdjabuAinda não há avaliações
- 2 - 11 - Lecture 4B - Correlation (10-41)Documento5 páginas2 - 11 - Lecture 4B - Correlation (10-41)bablinayakiAinda não há avaliações
- FEG1MA1Documento70 páginasFEG1MA1bananaAinda não há avaliações
- Lagrangian Mechanics 4Documento13 páginasLagrangian Mechanics 4Sahibnoor SinghAinda não há avaliações
- Ed RB3 1Documento13 páginasEd RB3 1Vinayak JhaAinda não há avaliações
- Gary R. LawlorDocumento13 páginasGary R. LawlorAlonso Pablo Olivares LagosAinda não há avaliações
- 21Documento14 páginas21VivekRouthAinda não há avaliações
- A Nonmonotonic ExampleDocumento3 páginasA Nonmonotonic Exampledekku gordeAinda não há avaliações
- Matlab AssignmentDocumento22 páginasMatlab AssignmentTaral jainAinda não há avaliações
- Lec 33Documento11 páginasLec 33shailiayushAinda não há avaliações
- Walter Lewin Notes 10Documento18 páginasWalter Lewin Notes 10Romesor ApolAinda não há avaliações
- Introduction To Calculus/LimitsDocumento16 páginasIntroduction To Calculus/LimitsLJ UretaAinda não há avaliações
- Lec1 3Documento29 páginasLec1 3vkagarwaAinda não há avaliações
- Eigenvalues VectorsDocumento23 páginasEigenvalues VectorsVladimir Jerson Alferez VargasAinda não há avaliações
- The DerivativeDocumento14 páginasThe DerivativeBiancaMihalacheAinda não há avaliações
- Mathematical NotesDocumento5 páginasMathematical NotesashAinda não há avaliações
- 4q37io 1Documento12 páginas4q37io 1Vinayak JhaAinda não há avaliações
- Instructor (Brad Osgood) :hello. I Hate It When I Do That. All Right. Here's SomeDocumento12 páginasInstructor (Brad Osgood) :hello. I Hate It When I Do That. All Right. Here's SomeElisée NdjabuAinda não há avaliações
- Lec30 PDFDocumento15 páginasLec30 PDFSwati RaiAinda não há avaliações
- Lec 2Documento13 páginasLec 2RAHUL NARANGAinda não há avaliações
- Mitocw - Watch?V 4wsmeqckpgi: Barton ZwiebachDocumento23 páginasMitocw - Watch?V 4wsmeqckpgi: Barton ZwiebachdeependrasinghjadounAinda não há avaliações
- Instructor (Stephen Boyd) :great. It Looks Like We're On. Let Me Make A Couple ofDocumento23 páginasInstructor (Stephen Boyd) :great. It Looks Like We're On. Let Me Make A Couple ofJagritiKumariAinda não há avaliações
- Improper IntegralsDocumento13 páginasImproper IntegralsQuice1969Ainda não há avaliações
- E Pii: Why Is - 1?Documento5 páginasE Pii: Why Is - 1?EinsteinJr1Ainda não há avaliações
- The Emergence of MechanicsDocumento15 páginasThe Emergence of MechanicsTony DoyleAinda não há avaliações
- Classical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 10Documento29 páginasClassical Physics Prof. V. Balakrishnan Department of Physics Indian Institute of Technology, Madras Lecture No. # 10Anonymous 8f2veZfAinda não há avaliações
- Lec 3Documento28 páginasLec 3shubhamAinda não há avaliações
- eHJuAByQf5A PDFDocumento13 páginaseHJuAByQf5A PDFHello It's MeAinda não há avaliações
- pr1TLyPyDw PDFDocumento4 páginaspr1TLyPyDw PDFالديزل الجراديAinda não há avaliações
- CS 2742 (Logic in Computer Science) - Fall 2008Documento3 páginasCS 2742 (Logic in Computer Science) - Fall 2008ZhichaoWangAinda não há avaliações
- lPz7VFnKI PDFDocumento9 páginaslPz7VFnKI PDFnk4everAinda não há avaliações
- Lec 31Documento23 páginasLec 31rajAinda não há avaliações
- A L'hospital's Rule For Multivariable FunctionsDocumento13 páginasA L'hospital's Rule For Multivariable FunctionslalasoisAinda não há avaliações
- Philosophy 244: #17-Intensional ObjectsDocumento5 páginasPhilosophy 244: #17-Intensional ObjectsDamla Nihan YildizAinda não há avaliações
- Line IntegralDocumento10 páginasLine IntegralRomesor ApolAinda não há avaliações
- Btech 1st Sem: Maths: Limit, Continuity & DifferentiabilityDocumento11 páginasBtech 1st Sem: Maths: Limit, Continuity & DifferentiabilityTechno India Group0% (2)
- Persamaan Maxweel GemDocumento20 páginasPersamaan Maxweel GemAndre BoxerAinda não há avaliações
- PIC18F46J50Documento562 páginasPIC18F46J50frank_grimesAinda não há avaliações
- Accurate TMR0 InterruptsDocumento6 páginasAccurate TMR0 Interruptsfrank_grimesAinda não há avaliações
- How To Recalibrate A PICDocumento3 páginasHow To Recalibrate A PICfrank_grimesAinda não há avaliações
- PIC18F46J50 ErrataDocumento12 páginasPIC18F46J50 Erratafrank_grimesAinda não há avaliações
- Passing A Port Pin As An Argument To A Function - MPLAB XC8Documento1 páginaPassing A Port Pin As An Argument To A Function - MPLAB XC8frank_grimesAinda não há avaliações
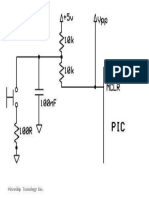
- MCLR Reset CircuitDocumento1 páginaMCLR Reset Circuitfrank_grimesAinda não há avaliações
- 2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303)Documento3 páginas2.830J / 6.780J / ESD.63J Control of Manufacturing Processes (SMA 6303)frank_grimesAinda não há avaliações
- Unit 6: Equations of Lines and Planes: Solutions Block 1:vector ArithmeticDocumento27 páginasUnit 6: Equations of Lines and Planes: Solutions Block 1:vector Arithmeticfrank_grimesAinda não há avaliações
- Garnet TutorialDocumento42 páginasGarnet Tutorialfrank_grimesAinda não há avaliações
- Lecture 1 - Manufacturing Process and Process ControlDocumento8 páginasLecture 1 - Manufacturing Process and Process Controlfrank_grimesAinda não há avaliações
- Y9sa8stsx MDocumento12 páginasY9sa8stsx Mfrank_grimesAinda não há avaliações
- Receptor Infrarrojo Tsop382Documento7 páginasReceptor Infrarrojo Tsop382frank_grimesAinda não há avaliações
- Open Collector Outputs - Signet Sensors PDFDocumento4 páginasOpen Collector Outputs - Signet Sensors PDFfrank_grimesAinda não há avaliações
- Structure: Study Guide Block 1:vector ArithmeticDocumento6 páginasStructure: Study Guide Block 1:vector Arithmeticfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part3 - Lec1 - 300k.mp4: Herbert GrossDocumento13 páginasMITOCW - MITRES - 18-007 - Part3 - Lec1 - 300k.mp4: Herbert Grossfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part3 - Lec3 - 300k.mp4: ProfessorDocumento13 páginasMITOCW - MITRES - 18-007 - Part3 - Lec3 - 300k.mp4: Professorfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part1 - Lec2 - 300k.mp4: Herbert GrossDocumento11 páginasMITOCW - MITRES - 18-007 - Part1 - Lec2 - 300k.mp4: Herbert Grossfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part1 - Lec1 - 300k.mp4: ProfessorDocumento8 páginasMITOCW - MITRES - 18-007 - Part1 - Lec1 - 300k.mp4: Professorfrank_grimesAinda não há avaliações
- MITOCW - MITRES - 18-007 - Part1 - Lec3 - 300k.mp4: ProfessorDocumento11 páginasMITOCW - MITRES - 18-007 - Part1 - Lec3 - 300k.mp4: Professorfrank_grimesAinda não há avaliações
- Times Interest Earned Ratio: Compare Interest Payments With Income Available To Pay ThemDocumento13 páginasTimes Interest Earned Ratio: Compare Interest Payments With Income Available To Pay Themfrank_grimesAinda não há avaliações
- CalculusDocumento59 páginasCalculusAllen QuirosAinda não há avaliações
- CL 333 Chemical Engineering Lab-2 (2019) : Experiment Number FM 302 TitleDocumento31 páginasCL 333 Chemical Engineering Lab-2 (2019) : Experiment Number FM 302 TitleAkshat PunekarAinda não há avaliações
- 4 1 C A MathematicalmodelingDocumento10 páginas4 1 C A Mathematicalmodelingapi-248595624Ainda não há avaliações
- 5JMSEAT0101104JiriMalac67 87Documento21 páginas5JMSEAT0101104JiriMalac67 87Sonia IlesAinda não há avaliações
- Rectilinear Motion: Sunil Kumar SinghDocumento19 páginasRectilinear Motion: Sunil Kumar SinghCinder BayongasanAinda não há avaliações
- Straight LinesDocumento6 páginasStraight LinesSteveMathewKuruvillaAinda não há avaliações
- Form 3-Chapter 12 Graphs of FunctionsDocumento16 páginasForm 3-Chapter 12 Graphs of FunctionsAlyaa SyahidaAinda não há avaliações
- SL 6.1-6.5 Derivatives - SolutionsDocumento10 páginasSL 6.1-6.5 Derivatives - SolutionsAnnanya GuhaAinda não há avaliações
- Objective QuestionsDocumento40 páginasObjective QuestionsManohar WaghmodeAinda não há avaliações
- M2-1-2-Parametric Geom Model Analytic CurvesDocumento38 páginasM2-1-2-Parametric Geom Model Analytic CurvesNANDULA GOUTHAM SAIAinda não há avaliações
- N3 MathematicsDocumento20 páginasN3 MathematicsAshlyAinda não há avaliações
- NSU 11-1 Eco 101 - Practice Question 1Documento3 páginasNSU 11-1 Eco 101 - Practice Question 1Asif Abedin Einstein100% (1)
- D dx3 Uv: Review ExercisesDocumento6 páginasD dx3 Uv: Review Exercisesfjavier.hernandezAinda não há avaliações
- Math 1050 Project 2017Documento4 páginasMath 1050 Project 2017api-245099625Ainda não há avaliações
- Chapter 8 The Cost of Production NotesDocumento24 páginasChapter 8 The Cost of Production Noteskey1991Ainda não há avaliações
- Chap 8 FrictionDocumento32 páginasChap 8 FrictionAyan Kabir ChowdhuryAinda não há avaliações
- Assignment 1 Solutions 1Documento10 páginasAssignment 1 Solutions 1boyarskyAinda não há avaliações
- Differential EquationDocumento16 páginasDifferential Equationशिवम् सुनील कुमारAinda não há avaliações
- Supplemental Specs For Ag RoadsDocumento42 páginasSupplemental Specs For Ag Roadsluismarcial01Ainda não há avaliações
- Surveying Lesson 6 To 10 PDFDocumento68 páginasSurveying Lesson 6 To 10 PDFNadane AldoverAinda não há avaliações
- 2022 1MA2 Applications of Differentiation - Notes (Students)Documento21 páginas2022 1MA2 Applications of Differentiation - Notes (Students)Sundaravadivel Prabhav (Njc)Ainda não há avaliações
- Chapter 4 Fundamentals of Analytic GeometryDocumento56 páginasChapter 4 Fundamentals of Analytic GeometryFrancis DurayAinda não há avaliações
- Consumer Choice: 2.1 Utility Functions and Marginal Utility FunctionsDocumento7 páginasConsumer Choice: 2.1 Utility Functions and Marginal Utility FunctionsLaxman KeshavAinda não há avaliações
- 100 Coverflow SpillwaysDocumento43 páginas100 Coverflow Spillwaysmote34Ainda não há avaliações