Você também pode gostar
- Ejemplo de Briefs 2Documento4 páginasEjemplo de Briefs 2Johan GalloAinda não há avaliações
- Ejemplo de Briefs 1Documento4 páginasEjemplo de Briefs 1Johan GalloAinda não há avaliações
- T4. ALTERNATIVAsDocumento5 páginasT4. ALTERNATIVAsJohan GalloAinda não há avaliações
- Trabajo Anova PDFDocumento8 páginasTrabajo Anova PDFJohan GalloAinda não há avaliações
- Ejercicio Des Transferencia de CalorDocumento2 páginasEjercicio Des Transferencia de CalorJohan GalloAinda não há avaliações
- Trayec. Ortog. y OblicDocumento2 páginasTrayec. Ortog. y OblicBethlehem Keyla GiancoAinda não há avaliações
- Python para TodosDocumento160 páginasPython para TodosJunior Sumosa100% (2)
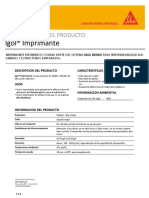
- Co-Ht - Igol ImprimanteDocumento2 páginasCo-Ht - Igol ImprimanteJohan GalloAinda não há avaliações
- BibliografíaDocumento2 páginasBibliografíaJohan GalloAinda não há avaliações
- Matriz QFDDocumento8 páginasMatriz QFDJohan GalloAinda não há avaliações
- T2. Planteamiento Problema, Justificación, ObjetivosDocumento4 páginasT2. Planteamiento Problema, Justificación, ObjetivosJohan GalloAinda não há avaliações
- T3 MATRIZqfd PDFDocumento1 páginaT3 MATRIZqfd PDFJohan GalloAinda não há avaliações
- Taller Ecuaciones DiferencialesDocumento6 páginasTaller Ecuaciones DiferencialesJohan GalloAinda não há avaliações
- Tuzta Si RespondeDocumento2 páginasTuzta Si RespondeJohan GalloAinda não há avaliações
- PLANTILA Entrevista EstudianteDocumento3 páginasPLANTILA Entrevista EstudianteJohan GalloAinda não há avaliações
- Teoría Sobre ExoesqueletosDocumento17 páginasTeoría Sobre ExoesqueletosJohan GalloAinda não há avaliações
- TALLER 2 Prensa (Con Taraje)Documento3 páginasTALLER 2 Prensa (Con Taraje)Johan GalloAinda não há avaliações
- Lo FemeninoDocumento7 páginasLo FemeninoJohan GalloAinda não há avaliações
- Ejercicio Transferencia de CalorDocumento2 páginasEjercicio Transferencia de CalorJohan GalloAinda não há avaliações
- Trabajo Sistema de Acondicionamiento de Aire Con Enfriador EvaporativoDocumento3 páginasTrabajo Sistema de Acondicionamiento de Aire Con Enfriador EvaporativoJohan Gallo100% (1)
- Planteamiento Problema, Justificación, ObjetivosDocumento4 páginasPlanteamiento Problema, Justificación, ObjetivosJohan Gallo33% (3)
- Preinforme EmisividadDocumento3 páginasPreinforme EmisividadJohan GalloAinda não há avaliações
- ViscosidadDocumento3 páginasViscosidadJohan GalloAinda não há avaliações
- Proyecto: Sistema de Aire Acondicionado para Un Local Con Una Carga de 50W Usando Un Enfriador EvaporativoDocumento17 páginasProyecto: Sistema de Aire Acondicionado para Un Local Con Una Carga de 50W Usando Un Enfriador EvaporativoJohan GalloAinda não há avaliações
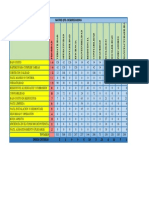
- Matriz de CalidadDocumento1 páginaMatriz de CalidadJohan GalloAinda não há avaliações
- T2. Planteamiento Problema, Justificación, ObjetivosDocumento4 páginasT2. Planteamiento Problema, Justificación, ObjetivosJohan GalloAinda não há avaliações
- Trabajo AnovaDocumento8 páginasTrabajo AnovaJohan GalloAinda não há avaliações
- T2. Planteamiento Problema, Justificación, ObjetivosDocumento4 páginasT2. Planteamiento Problema, Justificación, ObjetivosJohan GalloAinda não há avaliações
- T2. Planteamiento Problema, Justificación, ObjetivosDocumento4 páginasT2. Planteamiento Problema, Justificación, ObjetivosJohan GalloAinda não há avaliações
- Analogia Entre Los Tres Fenomenos de TransporteDocumento21 páginasAnalogia Entre Los Tres Fenomenos de Transportejulian ValderramaAinda não há avaliações
- Terminar FisicaDocumento8 páginasTerminar FisicaFlavio Adrian Sisa CastroAinda não há avaliações
- 10° Guía 12 EstaticaDocumento6 páginas10° Guía 12 Estaticaluis fernando olivo diazAinda não há avaliações
- REDBOXCO - Guia para Aprender A Volar Tu DroneDocumento14 páginasREDBOXCO - Guia para Aprender A Volar Tu DroneAntonio RodriguezAinda não há avaliações
- Control Hibrido Pid-Difuso en Robot Seguidor de Línea No Holonómico.Documento10 páginasControl Hibrido Pid-Difuso en Robot Seguidor de Línea No Holonómico.Enio DiazAinda não há avaliações
- Resumen Ejercicio 2Documento16 páginasResumen Ejercicio 2Diego Agustin Menares CortesAinda não há avaliações
- Discusión 6Documento5 páginasDiscusión 6Paola PeñaAinda não há avaliações
- TorqueDocumento12 páginasTorqueAnyela CaceresAinda não há avaliações
- Manual de Juegos y Ejercicios TeatralesDocumento59 páginasManual de Juegos y Ejercicios TeatralesJorge Eliecer Aldana PoloAinda não há avaliações
- Qué Es Una Onda MecánicaDocumento6 páginasQué Es Una Onda MecánicaValeriaZuritaHurtadoAinda não há avaliações
- Teorias Del AprendizajeDocumento4 páginasTeorias Del AprendizajeEDENAinda não há avaliações
- El Concreto y Los TerremotosDocumento24 páginasEl Concreto y Los TerremotosJohan DionicioAinda não há avaliações
- Micrometeorología UTADocumento7 páginasMicrometeorología UTARomulo PedrazaAinda não há avaliações
- Guia Ejercicios CA N 1Documento4 páginasGuia Ejercicios CA N 1Juan IgnacioAinda não há avaliações
- Movimiento unidimensional y caída libreDocumento4 páginasMovimiento unidimensional y caída librevickyAinda não há avaliações
- T - Boscovich TH E O R I ADocumento588 páginasT - Boscovich TH E O R I AVVANDER100% (1)
- Ondas Estacionarias Transversales en Una CuerdaDocumento6 páginasOndas Estacionarias Transversales en Una CuerdaGendri ElizbethAinda não há avaliações
- Mecánica Tarea cinemática: Movimiento, velocidad y aceleraciónDocumento6 páginasMecánica Tarea cinemática: Movimiento, velocidad y aceleraciónOrlando Carbajal DominguezAinda não há avaliações
- Primera Fecha Tema 7 PDFDocumento1 páginaPrimera Fecha Tema 7 PDFFranco RomanelliAinda não há avaliações
- Velocidad Instantánea y Velocidad MediaDocumento10 páginasVelocidad Instantánea y Velocidad MediaIan CarlosAinda não há avaliações
- Ejercicios de Movimiento Mecánico para Segundo Grado de SecundariaDocumento3 páginasEjercicios de Movimiento Mecánico para Segundo Grado de SecundariaOscar Quintero100% (1)
- Efeto DopplerDocumento2 páginasEfeto DopplerAndy GarcíaAinda não há avaliações
- Física Tomo 2 2010-2011Documento275 páginasFísica Tomo 2 2010-2011Amaia San Sebastian100% (5)
- TALLER 2 MOVIMIENTO EN UNA DIMENSION FISICA 1 JDCDocumento3 páginasTALLER 2 MOVIMIENTO EN UNA DIMENSION FISICA 1 JDCeder yofred grosso lopezAinda não há avaliações
- Practica #1: Título: Laboratorio Física Básica IDocumento5 páginasPractica #1: Título: Laboratorio Física Básica IRodrigo AlejoAinda não há avaliações
- Reporte de Experiencia de MeldeDocumento5 páginasReporte de Experiencia de MeldeYOSSUE MANUEL JUNIOR PADILLA HUAMANAinda não há avaliações
- Ejercicios Extra de SI y CinemáticaDocumento5 páginasEjercicios Extra de SI y Cinemáticacapo007Ainda não há avaliações
- Movimiento Rectilíneo UniformeDocumento3 páginasMovimiento Rectilíneo UniformePatatoAinda não há avaliações
- Tarea 4 - Fenómeno de BeatingDocumento8 páginasTarea 4 - Fenómeno de BeatingAlejandro Caceres HumireAinda não há avaliações
- Estatica de Fluidos-Cap1Documento13 páginasEstatica de Fluidos-Cap1Jean Phier CastilloAinda não há avaliações