Você também pode gostar
- 217 3367 JaguarDatasheetDocumento16 páginas217 3367 JaguarDatasheetYi Cong HuangAinda não há avaliações
- User Manual SmartElex 15S DC Motor Driver 15A 30A PeakDocumento14 páginasUser Manual SmartElex 15S DC Motor Driver 15A 30A PeakRakesh KurhadeAinda não há avaliações
- KT60KM06Documento2 páginasKT60KM06Luciano DiasAinda não há avaliações
- Description Power Range: Analog Servo DriveDocumento7 páginasDescription Power Range: Analog Servo DriveElectromateAinda não há avaliações
- Emdrive 500 Datasheet V2 6Documento5 páginasEmdrive 500 Datasheet V2 6nathaniel benelishaAinda não há avaliações
- Description Power Range: Analog Servo DriveDocumento7 páginasDescription Power Range: Analog Servo DriveElectromateAinda não há avaliações
- 150A DC Motor Controller: FeaturesDocumento11 páginas150A DC Motor Controller: Featuresej ejazAinda não há avaliações
- Manual - Easy Driver - HSS758 V2.0Documento15 páginasManual - Easy Driver - HSS758 V2.0MarcosAinda não há avaliações
- E Tended Environment: Analog Servo DriveDocumento8 páginasE Tended Environment: Analog Servo DriveElectromateAinda não há avaliações
- Description Power Range: Analog Servo DriveDocumento8 páginasDescription Power Range: Analog Servo DriveElectromateAinda não há avaliações
- Driver Motore Passo PassoDocumento12 páginasDriver Motore Passo Passogionp1Ainda não há avaliações
- Kg-545 Automatic Mains Failure UnitDocumento35 páginasKg-545 Automatic Mains Failure UnitJack GehlotAinda não há avaliações
- Minispeed Ms 60Documento36 páginasMinispeed Ms 60Duvan Steven AguileraAinda não há avaliações
- Description Power Range: Analog Servo DriveDocumento7 páginasDescription Power Range: Analog Servo DriveElectromateAinda não há avaliações
- CH 2Documento14 páginasCH 2PeterhayatAinda não há avaliações
- JYQD-V7.3E2 BLDC Motor DriverDocumento3 páginasJYQD-V7.3E2 BLDC Motor Driverluis angel alvarez camposAinda não há avaliações
- Copley Controls 7225acDocumento12 páginasCopley Controls 7225acمحمد خدائیAinda não há avaliações
- Description Power Range: Analog Servo DriveDocumento7 páginasDescription Power Range: Analog Servo DriveElectromateAinda não há avaliações
- M/V™ Series Servo Drive: Description Power RangeDocumento12 páginasM/V™ Series Servo Drive: Description Power RangeElectromateAinda não há avaliações
- Analog Servo Drive: Description Power RangeDocumento7 páginasAnalog Servo Drive: Description Power RangeElectromateAinda não há avaliações
- Description Power Range: Analog Servo DriveDocumento8 páginasDescription Power Range: Analog Servo DriveElectromateAinda não há avaliações
- MC3PHACDocumento36 páginasMC3PHACBảo BìnhAinda não há avaliações
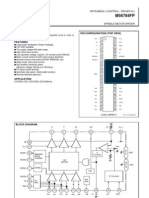
- MITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONDocumento11 páginasMITSUBISHI M56784FP SPINDLE MOTOR DRIVER IC DESCRIPTIONAdriano TameouvindoAinda não há avaliações
- Azbh 12 A 8Documento8 páginasAzbh 12 A 8ElectromateAinda não há avaliações
- Description Power Range: Analog Servo DriveDocumento7 páginasDescription Power Range: Analog Servo DriveElectromateAinda não há avaliações
- User'S Manual: JULY, 2015Documento12 páginasUser'S Manual: JULY, 2015Mudassar RafiqAinda não há avaliações
- DATAKOM DKG207 User Manual PDFDocumento28 páginasDATAKOM DKG207 User Manual PDFAmir MohammedAinda não há avaliações
- Description Power Range: Analog Servo DriveDocumento8 páginasDescription Power Range: Analog Servo DriveElectromateAinda não há avaliações
- Description Power Range: Analog Servo DriveDocumento9 páginasDescription Power Range: Analog Servo DriveElectromateAinda não há avaliações
- MD2278 Microstepping Driver SpecsDocumento3 páginasMD2278 Microstepping Driver Specshoangmanh1989Ainda não há avaliações
- User Manual: HGM6310D/6320D Auto Start ModuleDocumento35 páginasUser Manual: HGM6310D/6320D Auto Start ModuleVaam Group sasAinda não há avaliações
- E Tended Environment: Analog Servo DriveDocumento8 páginasE Tended Environment: Analog Servo DriveElectromateAinda não há avaliações
- Description Power Range: Analog Servo DriveDocumento8 páginasDescription Power Range: Analog Servo DriveElectromateAinda não há avaliações
- Datasheet - M542H Stepper Motor DriverDocumento10 páginasDatasheet - M542H Stepper Motor DriversthollanderAinda não há avaliações
- Installation and Maintenance Manual Type SSM Medium Voltage 200 - 7,500 HPDocumento120 páginasInstallation and Maintenance Manual Type SSM Medium Voltage 200 - 7,500 HPHans MortenAinda não há avaliações
- DC Servo Drive: 10V - 30V DC, 50W With ASCII ModbusDocumento35 páginasDC Servo Drive: 10V - 30V DC, 50W With ASCII Modbusrajmeet singhAinda não há avaliações
- WIRE LESS Land Mine Detection Robo-VehicleDocumento35 páginasWIRE LESS Land Mine Detection Robo-VehicleDebashish BeheraAinda não há avaliações
- Dkg-109 Automatic Mains Failure UnitDocumento46 páginasDkg-109 Automatic Mains Failure UnitmohsenAinda não há avaliações
- MegaMoto Plus Motor Control Shield For ArduinoDocumento13 páginasMegaMoto Plus Motor Control Shield For ArduinosiogAinda não há avaliações
- DRV 8811Documento22 páginasDRV 8811nelson_loboAinda não há avaliações
- BLDC-2KWD-DC-MANUL (ENG) Version 1.3Documento15 páginasBLDC-2KWD-DC-MANUL (ENG) Version 1.3BaehyoungryeolAinda não há avaliações
- RMCS 3002Documento10 páginasRMCS 3002Dhiraj MistryAinda não há avaliações
- Tension Control System MCS-166, MCS-203, MCS-204: Installation & Operation InstructionsDocumento24 páginasTension Control System MCS-166, MCS-203, MCS-204: Installation & Operation Instructionsesau hernandezAinda não há avaliações
- Sla7024m PDFDocumento12 páginasSla7024m PDFEJASMANYAinda não há avaliações
- Control Circuit Wiring Variador V1000 YaskawaDocumento8 páginasControl Circuit Wiring Variador V1000 YaskawaAndrés RamírezAinda não há avaliações
- Description Power Range: Analog Servo DriveDocumento7 páginasDescription Power Range: Analog Servo DriveElectromateAinda não há avaliações
- Altivar Machine ATV340 - ATV340D22N4Documento16 páginasAltivar Machine ATV340 - ATV340D22N4PhaniAinda não há avaliações
- Dual Plug-In Valve Controller, Canopen®Documento5 páginasDual Plug-In Valve Controller, Canopen®Simen EllingsenAinda não há avaliações
- Dkg-207 Automatic Mains Failure and Remote Start UnitDocumento27 páginasDkg-207 Automatic Mains Failure and Remote Start Unitemad alsarhanAinda não há avaliações
- Analog Servo Drive: Description Power RangeDocumento7 páginasAnalog Servo Drive: Description Power RangeElectromateAinda não há avaliações
- Drive a stepper motor with the SAA1042 semiconductorDocumento6 páginasDrive a stepper motor with the SAA1042 semiconductorKevin StrongAinda não há avaliações
- Sla7024m (Motor Driver)Documento13 páginasSla7024m (Motor Driver)Franklin Miranda RoblesAinda não há avaliações
- Dkg-109J Automatic Mains Failure UnitDocumento51 páginasDkg-109J Automatic Mains Failure UnitMostafa ShannaAinda não há avaliações
- Advanced Motion Controls BDC30A8Documento7 páginasAdvanced Motion Controls BDC30A8Servo2GoAinda não há avaliações
- MiniAx User Guide - Issue 1Documento37 páginasMiniAx User Guide - Issue 1Control CheckAinda não há avaliações
- Sla7024 26 29mDocumento12 páginasSla7024 26 29mbashtavAinda não há avaliações
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 1Nota: 2.5 de 5 estrelas2.5/5 (3)
- Analog Circuit Design: A Tutorial Guide to Applications and SolutionsNo EverandAnalog Circuit Design: A Tutorial Guide to Applications and SolutionsNota: 3.5 de 5 estrelas3.5/5 (6)
- Reference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2No EverandReference Guide To Useful Electronic Circuits And Circuit Design Techniques - Part 2Ainda não há avaliações
- Analog Circuit Design Volume Three: Design Note CollectionNo EverandAnalog Circuit Design Volume Three: Design Note CollectionNota: 3 de 5 estrelas3/5 (2)
- Evaluation of Radiometers in Full - Time Use at The National Renewable Energy Laboratory Solar Radiation Research LaboratoryDocumento57 páginasEvaluation of Radiometers in Full - Time Use at The National Renewable Energy Laboratory Solar Radiation Research LaboratoryJuan de Dios Alardín HernándezAinda não há avaliações
- FRC RoboRIO OverviewDocumento2 páginasFRC RoboRIO OverviewJuan de Dios Alardín HernándezAinda não há avaliações
- FRC NI RoboRIO User Manual PDFDocumento31 páginasFRC NI RoboRIO User Manual PDFJuan de Dios Alardín HernándezAinda não há avaliações
- FRC Jaguar Getting Started GuideDocumento26 páginasFRC Jaguar Getting Started GuideJuan de Dios Alardín HernándezAinda não há avaliações
- LabVIEW Robotics Programming Guide ForDocumento65 páginasLabVIEW Robotics Programming Guide ForJuan de Dios Alardín HernándezAinda não há avaliações
- RoboRIO SpecificationsDocumento10 páginasRoboRIO SpecificationsJorge VillalobosAinda não há avaliações
- FRC Programming Your Radio For Home UseDocumento7 páginasFRC Programming Your Radio For Home UseJuan de Dios Alardín HernándezAinda não há avaliações
- FRC Jaguar PFDocumento11 páginasFRC Jaguar PFJuan de Dios Alardín HernándezAinda não há avaliações
- FRC Updating and Configuring Pneumatics Control Module and Power Distribution PanelDocumento9 páginasFRC Updating and Configuring Pneumatics Control Module and Power Distribution PanelJuan de Dios Alardín HernándezAinda não há avaliações
- FRC 2016 Wiring The 2016 FRC Control SystemDocumento18 páginasFRC 2016 Wiring The 2016 FRC Control SystemJuan de Dios Alardín HernándezAinda não há avaliações
- FRC 2016 Running Your Benchtop Test ProgramDocumento3 páginasFRC 2016 Running Your Benchtop Test ProgramJuan de Dios Alardín HernándezAinda não há avaliações
- FRC 2016 Software Component Overview - Getting Started With The 2016 Control SystemDocumento8 páginasFRC 2016 Software Component Overview - Getting Started With The 2016 Control SystemJuan de Dios Alardín HernándezAinda não há avaliações
- FRC 2016 Driver Station Powered by NI LabVIEWDocumento6 páginasFRC 2016 Driver Station Powered by NI LabVIEWJuan de Dios Alardín HernándezAinda não há avaliações
- FRC 2016 Pneumatics Manual PDFDocumento23 páginasFRC 2016 Pneumatics Manual PDFJuan de Dios Alardín Hernández100% (1)
- FRC 2016 Running Your Benchtop Test ProgramDocumento3 páginasFRC 2016 Running Your Benchtop Test ProgramJuan de Dios Alardín HernándezAinda não há avaliações
- FRC 2016 Autonomous Timed Movement TutorialDocumento2 páginasFRC 2016 Autonomous Timed Movement TutorialJuan de Dios Alardín HernándezAinda não há avaliações
- FRC 2016 Imaging Your RoboRIO - Getting Started With The 2016 Control SystemDocumento4 páginasFRC 2016 Imaging Your RoboRIO - Getting Started With The 2016 Control SystemJuan de Dios Alardín HernándezAinda não há avaliações
- FRC 2016 Getting Started With The 2016 Control SystemDocumento252 páginasFRC 2016 Getting Started With The 2016 Control SystemJuan de Dios Alardín HernándezAinda não há avaliações
- FRC 2016 Control System HardwareDocumento114 páginasFRC 2016 Control System HardwareJuan de Dios Alardín HernándezAinda não há avaliações
- 198 Form pg5Documento3 páginas198 Form pg5iosefatu63Ainda não há avaliações
- Beyond BeatmatchingDocumento187 páginasBeyond BeatmatchingShortStrangle100% (2)
- Irjet V3i7136Documento5 páginasIrjet V3i7136Rajesh SharmaAinda não há avaliações
- 3 Phase Imbalance Detection Using CR7310 SensorDocumento1 página3 Phase Imbalance Detection Using CR7310 Sensorr.veenaaAinda não há avaliações
- SET-NET Pericyclic ReactionsDocumento61 páginasSET-NET Pericyclic ReactionsBapu ThoratAinda não há avaliações
- Multifunctional Capability With Seamless Transition of Three-Phase Grid Using FLMF Control ApproachDocumento6 páginasMultifunctional Capability With Seamless Transition of Three-Phase Grid Using FLMF Control ApproachRAJDIP DEBNATHAinda não há avaliações
- A Voltage Regulator For Power Quality Improvement in Low-Voltage Distribution GridsDocumento3 páginasA Voltage Regulator For Power Quality Improvement in Low-Voltage Distribution GridsSengottu VeluAinda não há avaliações
- Vdic 2Documento142 páginasVdic 2api-3735399100% (3)
- Odoo11 PDFDocumento77 páginasOdoo11 PDFLogan HoangAinda não há avaliações
- 33KV Incoming Feeder Circuit BreakerDocumento2 páginas33KV Incoming Feeder Circuit BreakerMD. Mazidul Islam MahfujAinda não há avaliações
- CF WiFi 802.11n Hotspot Datasheet - 2Documento4 páginasCF WiFi 802.11n Hotspot Datasheet - 2rezaAinda não há avaliações
- Ceramic, Polymer and Composite MaterialsDocumento39 páginasCeramic, Polymer and Composite MaterialsYasir ArafatAinda não há avaliações
- 5054 s16 QP 22 PDFDocumento16 páginas5054 s16 QP 22 PDFAhmediqraAinda não há avaliações
- Inorganic Chemistry NotesDocumento105 páginasInorganic Chemistry NotesOdongo TonnyAinda não há avaliações
- Deif Software Installation InstructionDocumento9 páginasDeif Software Installation InstructionlilyricardoseamanAinda não há avaliações
- IEC 61508 / IEC 61511 SIL PresentationDocumento8 páginasIEC 61508 / IEC 61511 SIL PresentationRobin Alan Cressent33% (3)
- Compact solenoid valves for commercial applicationsDocumento16 páginasCompact solenoid valves for commercial applicationsJorge Jarpa VAinda não há avaliações
- Evac-105 / Evdc-105 Energy StorageDocumento2 páginasEvac-105 / Evdc-105 Energy StorageYoslin RuizAinda não há avaliações
- Emissivity - WikipediaDocumento12 páginasEmissivity - WikipediaOmer TokhAinda não há avaliações
- KLIPSCH Computer Speaker Service ManualDocumento21 páginasKLIPSCH Computer Speaker Service ManualEric CreechAinda não há avaliações
- PIC Mikrobootloader Manual PDFDocumento1 páginaPIC Mikrobootloader Manual PDFchristianAinda não há avaliações
- 57 - Linear Predictive Coding PDFDocumento7 páginas57 - Linear Predictive Coding PDFJeya Shree Arunjunai RajAinda não há avaliações
- ControlDocumento15 páginasControlmontie3Ainda não há avaliações
- High-Performance Micropower Switched-Capacitor FilterDocumento11 páginasHigh-Performance Micropower Switched-Capacitor Filterreader_188Ainda não há avaliações
- Wansview IPCamera User Manual (NCB-541W)Documento22 páginasWansview IPCamera User Manual (NCB-541W)leomarini8Ainda não há avaliações
- (y5ii Cun-u29) Hướng Dẫn Cập Nhật Phiên Bản Android 5Documento4 páginas(y5ii Cun-u29) Hướng Dẫn Cập Nhật Phiên Bản Android 5Sarra ChoucheneAinda não há avaliações
- Electrode Potential SummaryDocumento1 páginaElectrode Potential SummaryNooran ShamsAinda não há avaliações
- 2020 Annual Report Melexis enDocumento156 páginas2020 Annual Report Melexis enAnthonyWittendorpAinda não há avaliações
- EV7748S-F-00A: 2.1 Channels SE and BTL Class D Audio Amplifier Evaluation BoardDocumento8 páginasEV7748S-F-00A: 2.1 Channels SE and BTL Class D Audio Amplifier Evaluation BoardJesus fuentesAinda não há avaliações
- H30D E G F User S ManualDocumento41 páginasH30D E G F User S Manualaradon11Ainda não há avaliações