Você também pode gostar
- Embedded Hypervisor The Ultimate Step-By-Step GuideNo EverandEmbedded Hypervisor The Ultimate Step-By-Step GuideAinda não há avaliações
- Digital Communication Systems in Bandlimited Channel: MET 1413 Faculty of Electrical Enginerring 81310 UTM SkudaiDocumento6 páginasDigital Communication Systems in Bandlimited Channel: MET 1413 Faculty of Electrical Enginerring 81310 UTM Skudaielhenshire_hAinda não há avaliações
- Elements of RF Link DesignDocumento157 páginasElements of RF Link DesignDr. Surendra Pal100% (1)
- Computer Programming Manual v3.5 28082020 (For Instructional Purposes Only)Documento135 páginasComputer Programming Manual v3.5 28082020 (For Instructional Purposes Only)SOLANA ARCHERAinda não há avaliações
- Matched FilterDocumento30 páginasMatched FilterLavanya GangadharanAinda não há avaliações
- Mmwave Studio User GuideDocumento81 páginasMmwave Studio User Guide王識傑Ainda não há avaliações
- Automising The CAN Communication System Using Raspberry-PiDocumento6 páginasAutomising The CAN Communication System Using Raspberry-PiIJRASETPublicationsAinda não há avaliações
- William Stallings Computer Organization and Architecture 8 Edition Computer Evolution and Performance Computer Evolution and PerformanceDocumento56 páginasWilliam Stallings Computer Organization and Architecture 8 Edition Computer Evolution and Performance Computer Evolution and PerformanceAhsan Jameel100% (2)
- AL ICT m3 Logic FirstDocumento5 páginasAL ICT m3 Logic FirstKanishka SeneviratneAinda não há avaliações
- Beginners' Guide To PowerPoint 2020 PDFDocumento104 páginasBeginners' Guide To PowerPoint 2020 PDFBiteMe76Ainda não há avaliações
- CCN Unit4 RaghudatheshDocumento46 páginasCCN Unit4 RaghudatheshraghudatheshAinda não há avaliações
- DC LabDocumento149 páginasDC LabRavi Kumar MogilsettiAinda não há avaliações
- Digital Communication (EC 691) Lab Manual Protected PDFDocumento62 páginasDigital Communication (EC 691) Lab Manual Protected PDFPoulami RoyAinda não há avaliações
- Advanced Communication Lab 01-01-14Documento67 páginasAdvanced Communication Lab 01-01-14Thiagu RajivAinda não há avaliações
- Hands On Contiki OS and Cooja Simulator: Exercises (Part II)Documento15 páginasHands On Contiki OS and Cooja Simulator: Exercises (Part II)Vassilios KotsiouAinda não há avaliações
- Human Computer InteractionDocumento80 páginasHuman Computer InteractionJerico Salleh VilogAinda não há avaliações
- Traffic Light Simulator Using 8086 Assembly LanguageDocumento14 páginasTraffic Light Simulator Using 8086 Assembly Languagedihosid99Ainda não há avaliações
- Ch5 - Basic Computer Organization and DesignDocumento44 páginasCh5 - Basic Computer Organization and DesignGagan ChandelAinda não há avaliações
- Experiment 11: Setup of Labview Interface For Arduino Safety PrecautionsDocumento7 páginasExperiment 11: Setup of Labview Interface For Arduino Safety PrecautionsAbsar AhmadAinda não há avaliações
- Free Pascal User's GuideDocumento185 páginasFree Pascal User's GuidepicassaaAinda não há avaliações
- Boano Thesis 2009Documento172 páginasBoano Thesis 2009cjwangAinda não há avaliações
- EMPro Workshop - Module2 - EMPro Basics Version 2.0Documento26 páginasEMPro Workshop - Module2 - EMPro Basics Version 2.0Trieu DoanAinda não há avaliações
- Group - 4 Advanced Network AssignmentDocumento12 páginasGroup - 4 Advanced Network AssignmentANTENEHAinda não há avaliações
- Ict-Lab ProposalDocumento28 páginasIct-Lab ProposalSURGENT LABANAinda não há avaliações
- Introduction To C Programming AssignmentDocumento14 páginasIntroduction To C Programming AssignmentSreePrakash100% (2)
- Cpp-Collected Lab ManualDocumento31 páginasCpp-Collected Lab ManualGalatu BashaAinda não há avaliações
- C++ Fundamentals DemoDocumento149 páginasC++ Fundamentals DemoMohd FirdausAinda não há avaliações
- Key Components For A Workstation To Connect To A Network P3 Unit 9Documento1 páginaKey Components For A Workstation To Connect To A Network P3 Unit 9treyAinda não há avaliações
- SrsDocumento15 páginasSrsgdayanand4uAinda não há avaliações
- BrainGizer BookDocumento102 páginasBrainGizer BookRania NabilAinda não há avaliações
- Introduction To Computer Science 1.1Documento165 páginasIntroduction To Computer Science 1.1SylasmendesAinda não há avaliações
- Inter Office Communication File Managment SystemDocumento87 páginasInter Office Communication File Managment SystemGudata GechoAinda não há avaliações
- Allslides HandoutDocumento269 páginasAllslides Handoutmamudu francisAinda não há avaliações
- Applications of Neuro Fuzzy Systems: A Brief Review and Future OutlineDocumento17 páginasApplications of Neuro Fuzzy Systems: A Brief Review and Future OutlineMutiaraning PertiwiAinda não há avaliações
- System Analysis and DesignDocumento24 páginasSystem Analysis and DesignNahar Sabirah100% (1)
- Ics2307 Simulation and ModellingDocumento79 páginasIcs2307 Simulation and ModellingOloo PunditAinda não há avaliações
- Chapter 21 - Clock Synchronization in Distributed Systems Using NTP and PTPDocumento73 páginasChapter 21 - Clock Synchronization in Distributed Systems Using NTP and PTPPJFAinda não há avaliações
- # Basics of ProgrammingDocumento76 páginas# Basics of ProgrammingPrajik ShresthaAinda não há avaliações
- Starfast-A Wireless Wearable EEG Biometric System Based On The ENOBIO SensorDocumento8 páginasStarfast-A Wireless Wearable EEG Biometric System Based On The ENOBIO SensorMohammed Suleman Ashraf100% (2)
- Satellite Communication Pratt John Willey PublicationsDocumento143 páginasSatellite Communication Pratt John Willey PublicationsKelvin Delgado RiveraAinda não há avaliações
- Assembly Language Programming 16 31Documento16 páginasAssembly Language Programming 16 31RupalAinda não há avaliações
- Vit ComprehensiveDocumento279 páginasVit ComprehensiveShubham100% (1)
- DsPIC30F4011 - Robotics 3Documento33 páginasDsPIC30F4011 - Robotics 3Senthil Kumar100% (1)
- Chapter - 2 Taxonomy of BugsDocumento7 páginasChapter - 2 Taxonomy of BugsDIWAKAR UAinda não há avaliações
- CS1601 Computer ArchitectureDocumento389 páginasCS1601 Computer Architectureainugiri100% (1)
- Labview Electronics Experiment DAQDocumento44 páginasLabview Electronics Experiment DAQChip Huynh100% (1)
- Book Fall2011Documento450 páginasBook Fall2011yuqiao1Ainda não há avaliações
- Vi Sem Ece Simulation Practical Lab Manual (Diploma "L" Scheme Lab Manual) S.No Name of The Experiment Page NoDocumento24 páginasVi Sem Ece Simulation Practical Lab Manual (Diploma "L" Scheme Lab Manual) S.No Name of The Experiment Page Nobiswajit7sarkarAinda não há avaliações
- LabVIEW PPT PresentationDocumento27 páginasLabVIEW PPT PresentationRanadeep DeyAinda não há avaliações
- Ee382M - Vlsi I: Spring 2009 (Prof. David Pan) Final ProjectDocumento13 páginasEe382M - Vlsi I: Spring 2009 (Prof. David Pan) Final ProjectsepritaharaAinda não há avaliações
- IPT Chapter 1 - Network Programming & Integrative CodingDocumento22 páginasIPT Chapter 1 - Network Programming & Integrative Codingmilkikoo shiferaAinda não há avaliações
- Cellular Neural Networks: A ReviewDocumento31 páginasCellular Neural Networks: A Reviews00uravAinda não há avaliações
- 10.rtprogramming HandoutDocumento20 páginas10.rtprogramming HandoutTrishool NarayanasettyAinda não há avaliações
- Database Engineering (EC-240) : Lab Manual # 05Documento9 páginasDatabase Engineering (EC-240) : Lab Manual # 05AMINA QADEERAinda não há avaliações
- Lab Assignment 2: MIPS Single-Cycle Implementation: Electrical and Computer Engineering University of CyprusDocumento23 páginasLab Assignment 2: MIPS Single-Cycle Implementation: Electrical and Computer Engineering University of CyprusNguyễn Trường Giang100% (1)
- Realization of Embedded Speech Recognmition Module Based On STM32Documento5 páginasRealization of Embedded Speech Recognmition Module Based On STM32German Dario BuitragoAinda não há avaliações
- Black Book IndexDocumento30 páginasBlack Book IndexKumara Raja JettiAinda não há avaliações
- Digital System DesignDocumento47 páginasDigital System Designyousaf hameedAinda não há avaliações
- Introduction to Machine Learning in the Cloud with Python: Concepts and PracticesNo EverandIntroduction to Machine Learning in the Cloud with Python: Concepts and PracticesAinda não há avaliações
- Cansat Competition PDR and CDR Guide 2007Documento11 páginasCansat Competition PDR and CDR Guide 2007Oscar GarnicaAinda não há avaliações
- Balun DesignDocumento6 páginasBalun DesignYouli TianAinda não há avaliações
- Onboard Data Handling: Gert Caspersen Terma A/SDocumento31 páginasOnboard Data Handling: Gert Caspersen Terma A/SOscar GarnicaAinda não há avaliações
- Xstreammodule - Modulo RFDocumento3 páginasXstreammodule - Modulo RFOscar GarnicaAinda não há avaliações
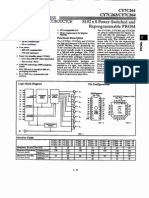
- CY7C264 - EpromDocumento9 páginasCY7C264 - EpromOscar GarnicaAinda não há avaliações
- QL Prog - ManualDocumento25 páginasQL Prog - ManualOscar GarnicaAinda não há avaliações
- 2GCS638015A0070-ESI Inverter Solutions For Battery Energy Storage ApplicationsDocumento28 páginas2GCS638015A0070-ESI Inverter Solutions For Battery Energy Storage ApplicationsANDYAFANADORAinda não há avaliações
- 1514 MS GLI Cottonmouth 04Documento2 páginas1514 MS GLI Cottonmouth 04Osorio LuisAinda não há avaliações
- Parts of A ComputerDocumento7 páginasParts of A ComputersalmanAinda não há avaliações
- Minutes Bucket Elevator Teleconference October 5 2012Documento6 páginasMinutes Bucket Elevator Teleconference October 5 2012Vinod Kumar VermaAinda não há avaliações
- FX5 Users Manual Melsec Communication Protocol ENG Ver ADocumento104 páginasFX5 Users Manual Melsec Communication Protocol ENG Ver ANguyễn Quang HảoAinda não há avaliações
- Can Protection CT Be Used As Metering CT & Vice Versa - Electrical ConceptsDocumento6 páginasCan Protection CT Be Used As Metering CT & Vice Versa - Electrical ConceptsMohammad HamamdAinda não há avaliações
- High-Speed, High-Side MOSFET Driver With Charge Pump and Overcurrent LimitDocumento24 páginasHigh-Speed, High-Side MOSFET Driver With Charge Pump and Overcurrent LimitiyanuAinda não há avaliações
- Artema - Cardio Aid 200 - Service Manual PDFDocumento152 páginasArtema - Cardio Aid 200 - Service Manual PDFNuno Freitas BastosAinda não há avaliações
- Installation Instructions: 5568 Rear Anti-Swaybar 67-'69 Camaro & FirebirdDocumento3 páginasInstallation Instructions: 5568 Rear Anti-Swaybar 67-'69 Camaro & Firebirdkkg4782Ainda não há avaliações
- Engine Cdi PDFDocumento78 páginasEngine Cdi PDFSergio Sanchez Rocha94% (16)
- ASUS vw224 Service ManualDocumento109 páginasASUS vw224 Service ManualZoran ProkicAinda não há avaliações
- 12 Info and Work Sheet Perform Under Chassis Preventive MaintenanceDocumento50 páginas12 Info and Work Sheet Perform Under Chassis Preventive MaintenanceDEATHSTAR GAMINGAinda não há avaliações
- Kawasaki PumpsDocumento32 páginasKawasaki PumpsRemzi Ceren100% (1)
- Lec.02 - Medium Voltage SwitchgearDocumento22 páginasLec.02 - Medium Voltage SwitchgearAchafi Moussa MahamatAinda não há avaliações
- Instruction Manual: Raytech Usa, IncDocumento57 páginasInstruction Manual: Raytech Usa, IncRuben Dario Gutierrez MontenegroAinda não há avaliações
- GHH Fahrzeuge MK-A20LP EN V1-16 2016-03-30 NeuDocumento4 páginasGHH Fahrzeuge MK-A20LP EN V1-16 2016-03-30 Neujyothi prakashAinda não há avaliações
- Computer Hardware Repairing Institute - Computer Hardware Repairing InstituteDocumento4 páginasComputer Hardware Repairing Institute - Computer Hardware Repairing Institutesahil kumarAinda não há avaliações
- Mechanic Individual Development Program 2021: United TractorsDocumento32 páginasMechanic Individual Development Program 2021: United TractorsandronikorioAinda não há avaliações
- J4 Diagrama ElectricoDocumento148 páginasJ4 Diagrama ElectricoJuan Rafael Vilchez SanchezAinda não há avaliações
- Module 17 QuestionDocumento3 páginasModule 17 QuestionUttamAinda não há avaliações
- s13 Ecu Pinout Ca18detDocumento1 páginas13 Ecu Pinout Ca18detEduardo Junior Obando Romero0% (1)
- Vacon NX Position Control APFIFF12 Application ManDocumento114 páginasVacon NX Position Control APFIFF12 Application ManTanuTiganuAinda não há avaliações
- Service and Maintenance Manual: Model(s)Documento54 páginasService and Maintenance Manual: Model(s)Sebastian GeraciAinda não há avaliações
- Manual-Magnapunch 2.0Documento120 páginasManual-Magnapunch 2.0Alex GonzalezAinda não há avaliações
- Current-Source DC-DC ConverterDocumento53 páginasCurrent-Source DC-DC ConverterpepenitoAinda não há avaliações
- Fresenius Optima PT, VS, ST - Service ManualDocumento106 páginasFresenius Optima PT, VS, ST - Service ManualJoey Chavez Bagatela100% (1)
- Pilot Circuits: Service Training Manual CM 760/780Documento5 páginasPilot Circuits: Service Training Manual CM 760/780victor laraAinda não há avaliações
- Spek Teknis AFKUPengadaan Peralatan Kantor Bidang 1 Batch 1revDocumento10 páginasSpek Teknis AFKUPengadaan Peralatan Kantor Bidang 1 Batch 1revArtha Arjuna MandiriAinda não há avaliações
- Cycle AnatomyDocumento2 páginasCycle AnatomyAlvin RajAinda não há avaliações
- RealmctubeDocumento15 páginasRealmctubeToM100% (6)