Você também pode gostar
- Formulae Sheet : All Other Formulae Should Be MemorisedDocumento3 páginasFormulae Sheet : All Other Formulae Should Be MemorisedIvanAinda não há avaliações
- NEET UG Physics Rotational-MotionDocumento146 páginasNEET UG Physics Rotational-Motionbatulchunawala10Ainda não há avaliações
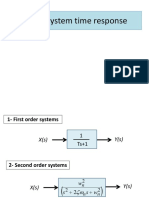
- 4 - System Time ResponseDocumento16 páginas4 - System Time ResponseAndrewAbdelmassiehAinda não há avaliações
- Indefinite IntegralsDocumento21 páginasIndefinite IntegralsPadhmanethrri SureshAinda não há avaliações
- Second Order Circuits 8 EdDocumento17 páginasSecond Order Circuits 8 Edpak tracksAinda não há avaliações
- 10.4 Green's TheoremDocumento24 páginas10.4 Green's TheoremKrishna ChaituAinda não há avaliações
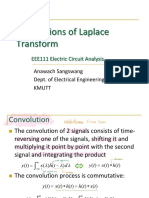
- Applications of Laplace Transform: EEE111 Electric Circuit AnalysisDocumento29 páginasApplications of Laplace Transform: EEE111 Electric Circuit AnalysisCHAYANIN AKETANANUNAinda não há avaliações
- Chapter 67 The T = Tan Θ/2 Substitution: EXERCISE 274 Page 750Documento7 páginasChapter 67 The T = Tan Θ/2 Substitution: EXERCISE 274 Page 750Carl Joseph MoredoAinda não há avaliações
- 17339-28-07 Morning Maths 2022Documento11 páginas17339-28-07 Morning Maths 2022princekumarg013Ainda não há avaliações
- Curves in SpaceDocumento10 páginasCurves in SpaceJohn ManciaAinda não há avaliações
- Mathias 2Documento1 páginaMathias 2Fuseini John MathiasAinda não há avaliações
- System TheoryDocumento17 páginasSystem TheoryMichael CampbellAinda não há avaliações
- DT Di L V DT DV R DT V D C: The Basic Circuit PersamaanDocumento17 páginasDT Di L V DT DV R DT V D C: The Basic Circuit PersamaanRidzki AkbarAinda não há avaliações
- Magnetically Coupled Circuits: Sjtu 1Documento30 páginasMagnetically Coupled Circuits: Sjtu 1Sahil JainAinda não há avaliações
- RT I TJ TK RT T T RT TT RT: Part (A) : SolutionsDocumento4 páginasRT I TJ TK RT T T RT TT RT: Part (A) : SolutionsAnees Ur Rehman50% (2)
- Integral GarisDocumento13 páginasIntegral GarisrakhaaditAinda não há avaliações
- Chapter 5 FrenchDocumento70 páginasChapter 5 FrenchVaibhav SharmaAinda não há avaliações
- Lecture 3 ModelingDocumento28 páginasLecture 3 ModelingSai AnoopAinda não há avaliações
- Problem30 77Documento1 páginaProblem30 77IENCSAinda não há avaliações
- T DT T: ConsiderDocumento1 páginaT DT T: ConsiderneetiAinda não há avaliações
- L2-Parametric and Implicit DifferentiationDocumento33 páginasL2-Parametric and Implicit Differentiationosebe.bisonga23Ainda não há avaliações
- Optics 5th Edition Hecht Solutions ManualDocumento8 páginasOptics 5th Edition Hecht Solutions ManualAyoob GhasemiAinda não há avaliações
- State Variable Analysis: Birla Vishwakarma MahavidyalayaDocumento17 páginasState Variable Analysis: Birla Vishwakarma Mahavidyalayavani100% (1)
- Computational Fluid Dynamics : February 28Documento68 páginasComputational Fluid Dynamics : February 28Tatenda NyabadzaAinda não há avaliações
- Laplace 5th Slide - ApplicationsDocumento36 páginasLaplace 5th Slide - Applicationsbeautyhowlader79Ainda não há avaliações
- M3 Unit 2 - MCQDocumento5 páginasM3 Unit 2 - MCQA-z knowledgeAinda não há avaliações
- FALLSEM2023-24 BECE302L TH VL2023240100272 2023-05-18 Reference-Material-IIDocumento30 páginasFALLSEM2023-24 BECE302L TH VL2023240100272 2023-05-18 Reference-Material-IIkrishna sanapala2003Ainda não há avaliações
- 0775 Gce 2021 Further Mathematics Paper 3 Proposed Mark GuideDocumento4 páginas0775 Gce 2021 Further Mathematics Paper 3 Proposed Mark GuideThéophile MbameAinda não há avaliações
- 9 - Parametric Equations and MotionDocumento10 páginas9 - Parametric Equations and MotionClaire CarreonAinda não há avaliações
- 0108 Iit JM N - HSDocumento5 páginas0108 Iit JM N - HSMann DoshiAinda não há avaliações
- Week04Module03 FourierTransformsDocumento13 páginasWeek04Module03 FourierTransformsrra127Ainda não há avaliações
- m2 ProblemsDocumento52 páginasm2 ProblemsSUSEELA V K RSETAinda não há avaliações
- Quality Control of A Paint Production ProcessDocumento15 páginasQuality Control of A Paint Production Processravinder9871_sharmaAinda não há avaliações
- NEET UG Physics Units-Dimensions Final-1Documento48 páginasNEET UG Physics Units-Dimensions Final-1Sourabh DhanetiaAinda não há avaliações
- AITS - 5 (Advanced) DT. 23-04-2023 Paper - I SolutionDocumento11 páginasAITS - 5 (Advanced) DT. 23-04-2023 Paper - I SolutionSouradip DeyAinda não há avaliações
- Formular 154Documento1 páginaFormular 154พิมพ์ โพธิสัตว์Ainda não há avaliações
- AEMx CH09Documento150 páginasAEMx CH09林茂泉Ainda não há avaliações
- Formulario 1° ParcialDocumento1 páginaFormulario 1° ParcialFernandaAinda não há avaliações
- MHS11 Z TransformDocumento16 páginasMHS11 Z TransformHassan El-kholyAinda não há avaliações
- Compute Torque Control TheoryDocumento15 páginasCompute Torque Control TheoryPhạm Quốc BảoAinda não há avaliações
- XT e E: 1. (A) and (B)Documento19 páginasXT e E: 1. (A) and (B)Anonymous 0MQ3zRAinda não há avaliações
- Practice 5 (Solution) : M T F KX DT DX DT X D M T X DT X DDocumento2 páginasPractice 5 (Solution) : M T F KX DT DX DT X D M T X DT X DckithoAinda não há avaliações
- QAS Integration Ex-1 To 4Documento186 páginasQAS Integration Ex-1 To 4rudra vermaAinda não há avaliações
- Maths IIT-JEE Best Approach' (MC SIR) : Integration Exercise-IDocumento32 páginasMaths IIT-JEE Best Approach' (MC SIR) : Integration Exercise-IBeat StabberAinda não há avaliações
- Tabela LaplaceDocumento1 páginaTabela LaplaceThiago LiãoAinda não há avaliações
- Midterm 01Documento3 páginasMidterm 01UnknownAinda não há avaliações
- 3 PolarcoordinatesDocumento26 páginas3 PolarcoordinatesWan SyazwanAinda não há avaliações
- Vel L Delta1 Delta2 Y Y1 Y2 KDocumento4 páginasVel L Delta1 Delta2 Y Y1 Y2 KRock StarAinda não há avaliações
- @bohring Bot 08-10-23 SR Iit Star Co Scmodel @heyitsyashxdDocumento12 páginas@bohring Bot 08-10-23 SR Iit Star Co Scmodel @heyitsyashxdDinesh BabuAinda não há avaliações
- AIITS 2325 OT JEEM TD SolDocumento21 páginasAIITS 2325 OT JEEM TD SolxxxlordimpalerxxxAinda não há avaliações
- Control Systems (CS) : Lecture-14-15 (Supplementary Slides) Time Domain Analysis of 2 Order SystemsDocumento12 páginasControl Systems (CS) : Lecture-14-15 (Supplementary Slides) Time Domain Analysis of 2 Order SystemsKiranKumarAinda não há avaliações
- Construction of Green's Function: Example 1Documento15 páginasConstruction of Green's Function: Example 1Athar NawazAinda não há avaliações
- The Solution of Legendre Equation Use PoDocumento12 páginasThe Solution of Legendre Equation Use PoErnesto RiveraAinda não há avaliações
- Equation SheetDocumento4 páginasEquation SheetMaría Carrascosa JimenezAinda não há avaliações
- Formula Sheet: KT Q N NDocumento2 páginasFormula Sheet: KT Q N NMarinaAinda não há avaliações
- Convection Integral MethodDocumento5 páginasConvection Integral MethodMazen AiAinda não há avaliações
- Parabola Exercise 2 - ADocumento19 páginasParabola Exercise 2 - AAtharva Sheersh PandeyAinda não há avaliações
- Lecture Notes (Chapter 2.4a Cylindrical Coordinate)Documento6 páginasLecture Notes (Chapter 2.4a Cylindrical Coordinate)Hafzal GaniAinda não há avaliações
- A-Vol II-2003 - Translated-Salvata PDFDocumento69 páginasA-Vol II-2003 - Translated-Salvata PDFDumitru MihaiAinda não há avaliações
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesNo EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesNota: 1.5 de 5 estrelas1.5/5 (2)