Você também pode gostar
- Resumen de The Second Machine Age de Erik Brynjolfsson y Andrew McAfeeNo EverandResumen de The Second Machine Age de Erik Brynjolfsson y Andrew McAfeeAinda não há avaliações
- Conalep Cuautla 173Documento23 páginasConalep Cuautla 173Eduardo Ochoa AlanisAinda não há avaliações
- Robótica InformeDocumento10 páginasRobótica Informeamanda belénAinda não há avaliações
- Robotica y Tipos de RobotsDocumento10 páginasRobotica y Tipos de RobotsYiced C. DucuaraAinda não há avaliações
- La Robotica Paola CVDocumento10 páginasLa Robotica Paola CVVioleta RamosAinda não há avaliações
- La RoboticaDocumento13 páginasLa RoboticaMichael ClarkAinda não há avaliações
- La RoboticaDocumento4 páginasLa RoboticaKELLY JOHANA GOMEZ MEZAAinda não há avaliações
- Evidencia de La Etapa 4 de TICDocumento9 páginasEvidencia de La Etapa 4 de TICEdson TorresAinda não há avaliações
- ROBOTICADocumento6 páginasROBOTICAvillazante.12959126Ainda não há avaliações
- Historia Del RobotDocumento7 páginasHistoria Del RobotHMmemoAinda não há avaliações
- Automatizacion en La Industria Petrolera PDFDocumento8 páginasAutomatizacion en La Industria Petrolera PDFYuriMejia100% (1)
- Robotica 3.1 y 3.2 MamalonaDocumento34 páginasRobotica 3.1 y 3.2 MamalonaCesar OmarAinda não há avaliações
- Referencia 1 RoboticaDocumento4 páginasReferencia 1 RoboticaOmar Lopez C.Ainda não há avaliações
- Proyecto de RoboticaDocumento4 páginasProyecto de RoboticaUlises UrgilesAinda não há avaliações
- ExposicionDocumento8 páginasExposicionJean RosarioAinda não há avaliações
- Informe Carro Robótico ESPOCHDocumento21 páginasInforme Carro Robótico ESPOCHBryan Marcelo Criollo IzaAinda não há avaliações
- 19-EISN-1-026 - Ensayo (Clase 7)Documento7 páginas19-EISN-1-026 - Ensayo (Clase 7)David BaezAinda não há avaliações
- La RoboticaDocumento24 páginasLa RoboticaJerson77Ainda não há avaliações
- Telemática y RoboticaDocumento15 páginasTelemática y RoboticaAuroth Darchrow50% (2)
- Que Es La Robótica PDFDocumento5 páginasQue Es La Robótica PDFEntretenimiento TotalAinda não há avaliações
- Qué Es Un Robot Frente A Un AutomatismoDocumento12 páginasQué Es Un Robot Frente A Un AutomatismoMarthaCeciliaNavarroGomezAinda não há avaliações
- Teoria Robótica 1º ESO - para Resolver Parte 1Documento35 páginasTeoria Robótica 1º ESO - para Resolver Parte 1Anonymous hfOnNNtAinda não há avaliações
- Que Es La Robotica Que Es Un RobotDocumento6 páginasQue Es La Robotica Que Es Un RobotGabriel FloresAinda não há avaliações
- Matrícula: Juan Pablo Cespedes MotaDocumento5 páginasMatrícula: Juan Pablo Cespedes MotaJuan Pablo C�spedes MotaAinda não há avaliações
- Informe de Robotica 2Documento11 páginasInforme de Robotica 2api-319172158Ainda não há avaliações
- La RoboticaDocumento13 páginasLa RoboticaAlejandro CamiloAinda não há avaliações
- La RoboticaDocumento3 páginasLa RoboticaChris HernandezAinda não há avaliações
- Ensayo Sobre Robotica2Documento3 páginasEnsayo Sobre Robotica2edward mauricio arenales aparicioAinda não há avaliações
- Historia de La RobóticaDocumento14 páginasHistoria de La RobóticaDj Blaster GonzálezAinda não há avaliações
- Cuestionario 1Documento5 páginasCuestionario 1Emma SantanaAinda não há avaliações
- Taller Tecnología y Emprendimiento-1Documento12 páginasTaller Tecnología y Emprendimiento-1Luisa LondoñoAinda não há avaliações
- Robotica 1Documento4 páginasRobotica 1Markino Surco BlancoAinda não há avaliações
- Electiva II - C1-20%Documento7 páginasElectiva II - C1-20%CloudsAinda não há avaliações
- Robot Seguidor de Luz (En Limpio)Documento16 páginasRobot Seguidor de Luz (En Limpio)Marcos Miguel Benito Herrera0% (1)
- Guia Tecnología 10mo 4 Automatismos y Robotica PDFDocumento5 páginasGuia Tecnología 10mo 4 Automatismos y Robotica PDFJAROL GALVISAinda não há avaliações
- Historia de La RobóticaDocumento8 páginasHistoria de La RobóticaLiliana Rivera GaRzaAinda não há avaliações
- Robótica y Aplicaciones La MineríaDocumento8 páginasRobótica y Aplicaciones La MineríaJesús DíazAinda não há avaliações
- Definición e Historia de RoboticaDocumento2 páginasDefinición e Historia de RoboticaSandra LizarazoAinda não há avaliações
- Historia y Evolución de La RobóticaDocumento40 páginasHistoria y Evolución de La RobóticaRafael Eduardo Balestrini MorenoAinda não há avaliações
- Robotic ADocumento6 páginasRobotic Aalejandropl2706Ainda não há avaliações
- Modulo 1 Titulo 1 Robotica 1Documento7 páginasModulo 1 Titulo 1 Robotica 1angelica joannaAinda não há avaliações
- Nuevo Documento de Microsoft Office WordDocumento53 páginasNuevo Documento de Microsoft Office WordMariana Muñiz MendozaAinda não há avaliações
- Cuestionario RobóticaDocumento5 páginasCuestionario RobóticakimberlyariagnasantanaAinda não há avaliações
- Que Es La RoboticaDocumento6 páginasQue Es La RoboticaJose Ruiloba100% (2)
- Definición e Historia de RoboticaDocumento2 páginasDefinición e Historia de RoboticaJhony RangelAinda não há avaliações
- TP N1 RoboticaDocumento17 páginasTP N1 RoboticaFacundo SarliAinda não há avaliações
- Qué Es La RobóticaDocumento11 páginasQué Es La RobóticaDaniel BaqueAinda não há avaliações
- Robotica y RobotsDocumento3 páginasRobotica y RobotswebavatarAinda não há avaliações
- ROBOTICADocumento3 páginasROBOTICAAmanda RangelAinda não há avaliações
- Robotica y Sus Aportes A La IndustriaDocumento18 páginasRobotica y Sus Aportes A La Industriacamille3195Ainda não há avaliações
- RobotsDocumento10 páginasRobotsTapia Vázquez NinaAinda não há avaliações
- Robotica Inteligencia ArtificialDocumento14 páginasRobotica Inteligencia Artificialequipo7uft blog100% (1)
- 0408 Práctica 03 - La RobóticaTarea SelinexDocumento13 páginas0408 Práctica 03 - La RobóticaTarea SelinextemariAinda não há avaliações
- Taller NovenoDocumento3 páginasTaller Novenocristhian andres caicedoAinda não há avaliações
- Qué Es La RobóticaDocumento9 páginasQué Es La RobóticaquentaticonabrigidaAinda não há avaliações
- Introducción A La ReboticaDocumento21 páginasIntroducción A La ReboticaLuiis FloresAinda não há avaliações
- RoboticaDocumento9 páginasRoboticaAngel Beingolea PadillaAinda não há avaliações
- Tesina (Seguidor de Linea)Documento29 páginasTesina (Seguidor de Linea)Brandon Martinez33% (3)
- Léolo y Dostoievski. La Identidad en El Subsuelo.Documento6 páginasLéolo y Dostoievski. La Identidad en El Subsuelo.Iván A. Sanabria SolanoAinda não há avaliações
- Fundamentos para Una Clínica PsicológicaDocumento10 páginasFundamentos para Una Clínica PsicológicaRoberto3965Ainda não há avaliações
- Francisco J. Ayala - La Naturaleza InacabadaDocumento292 páginasFrancisco J. Ayala - La Naturaleza InacabadaEnrique Luque García83% (6)
- Balanced ScorecardDocumento24 páginasBalanced ScorecardCRISTHIAN GONZALES100% (1)
- GONZÁLEZ y PARERA (2005) Clima Organizacional. Resultado Del Diagnóstico en Una EmpresaDocumento5 páginasGONZÁLEZ y PARERA (2005) Clima Organizacional. Resultado Del Diagnóstico en Una EmpresaHugoGonzálezLeeAinda não há avaliações
- Ultraismo, Existencialismo y Objetivismo en Literatura - Guillermo de TorreDocumento4 páginasUltraismo, Existencialismo y Objetivismo en Literatura - Guillermo de Torrediego mera olivaresAinda não há avaliações
- Guia para La Entrevista DE PERSONALDocumento3 páginasGuia para La Entrevista DE PERSONALRoggers Cayllahua GutierrezAinda não há avaliações
- Chabela 1Documento30 páginasChabela 1Percy Delgado DelgadoAinda não há avaliações
- Aprestamiento PedagogicoDocumento5 páginasAprestamiento PedagogicoPedro CigarroaAinda não há avaliações
- Sesión de Aprendizaje Temas y SubtemasDocumento4 páginasSesión de Aprendizaje Temas y SubtemasCesarina Mejía Rojas100% (1)
- Ensenanza InglesDocumento65 páginasEnsenanza Inglesalfonso_bajarAinda não há avaliações
- Comentario El Arbol de La Ciencia de BarojaDocumento5 páginasComentario El Arbol de La Ciencia de BarojaYolanda Ruiz AyoraAinda não há avaliações
- Guía para Mejorar y Trabajar La Comprensión Durante La Lectura Del Libro de Texto en Clase. Secundaria. Emilio Sánchez MiguelDocumento177 páginasGuía para Mejorar y Trabajar La Comprensión Durante La Lectura Del Libro de Texto en Clase. Secundaria. Emilio Sánchez MiguelToni de la TorreAinda não há avaliações
- Modulo 2. Tipología de ClientesDocumento30 páginasModulo 2. Tipología de ClienteshiarahAinda não há avaliações
- Práctica Discursivas Sobre BerutiDocumento222 páginasPráctica Discursivas Sobre BerutiJuan Ignacio BarreraAinda não há avaliações
- Exclusion - Fedra CuestasDocumento18 páginasExclusion - Fedra CuestasSebastián CalderónAinda não há avaliações
- La Acción Directiva y El Entorno InstitucionalDocumento4 páginasLa Acción Directiva y El Entorno Institucionalhildasaturnina100% (1)
- Qué Tipos de ClientesDocumento8 páginasQué Tipos de ClientesLUISA FERNANDA VERGARA URUENAAinda não há avaliações
- Para Poder Desarrollarse Plenamente El Ser HumanoDocumento2 páginasPara Poder Desarrollarse Plenamente El Ser HumanoBetoAinda não há avaliações
- EutanasiaDocumento4 páginasEutanasiaanon_63988608Ainda não há avaliações
- Maritza Urteaga Castro BiografiaDocumento3 páginasMaritza Urteaga Castro BiografiaGarras Yiyi Garcia GarciaAinda não há avaliações
- Examen Parcial - Semana 4 - Ra - Primer Bloque-Neuropsicologia - (Grupo3)Documento9 páginasExamen Parcial - Semana 4 - Ra - Primer Bloque-Neuropsicologia - (Grupo3)francisco diaz lopezAinda não há avaliações
- Bloque VDocumento7 páginasBloque VLuis Reyes VenturaAinda não há avaliações
- Características de Una Educación Creativa para La Creatividad.Documento2 páginasCaracterísticas de Una Educación Creativa para La Creatividad.elgatorisonAinda não há avaliações
- Caratula de Trabajo de Investigacion 4 de AbrilDocumento81 páginasCaratula de Trabajo de Investigacion 4 de AbrilmanuelcampostAinda não há avaliações
- Cuerpos Heteronormativos Porno y Polvos PlásticosDocumento20 páginasCuerpos Heteronormativos Porno y Polvos PlásticosGente RaraAinda não há avaliações
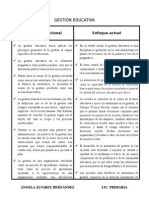
- Cuadro Compartivo Gestión EducativaDocumento2 páginasCuadro Compartivo Gestión EducativaEduardoCabreraAinda não há avaliações
- BASES Premio 5S - Rev 09Documento27 páginasBASES Premio 5S - Rev 09Alejandro MacriAinda não há avaliações
- 77 Video ForumDocumento1 página77 Video ForumJakarin CaveroAinda não há avaliações
- AvanziniDocumento16 páginasAvanziniLulú Aimé Gaiada100% (1)