Você também pode gostar
- Analog IC Design With Low-Dropout RegulatorsDocumento374 páginasAnalog IC Design With Low-Dropout Regulatorsberbou100% (2)
- SVPWM Thesis Prepared by DeekshitDocumento81 páginasSVPWM Thesis Prepared by Deekshitchunduri_rambabuAinda não há avaliações
- Police - Quizzzzzz - Okkkk Word BestDocumento66 páginasPolice - Quizzzzzz - Okkkk Word BestHassan Souleyman100% (10)
- Analysis and Modeling of Digital Peak Current Mode ControlDocumento6 páginasAnalysis and Modeling of Digital Peak Current Mode Controltinhmaixatoi2006Ainda não há avaliações
- Direct Power Control of PWM Converter Without Power Source VoltaDocumento6 páginasDirect Power Control of PWM Converter Without Power Source Voltabalaji mendiAinda não há avaliações
- 06 Chapter1Documento21 páginas06 Chapter1ShenbagalakshmiAinda não há avaliações
- Classical Control Methods for Power ConvertersDocumento9 páginasClassical Control Methods for Power ConvertersEmmeth ArdienteAinda não há avaliações
- Performance Estimation of Tristate DC-DC Buck Converter With Fixed Frequency and Constant Switching Hysteresis ControlDocumento10 páginasPerformance Estimation of Tristate DC-DC Buck Converter With Fixed Frequency and Constant Switching Hysteresis ControleditorijaiemAinda não há avaliações
- Ijetae 0913 69Documento6 páginasIjetae 0913 69Lucian Mihai BiltiuAinda não há avaliações
- Simulation of D STATCOM To Study Voltage PDFDocumento3 páginasSimulation of D STATCOM To Study Voltage PDFMario OrdenanaAinda não há avaliações
- HVDC Unit IIDocumento5 páginasHVDC Unit IIollata kalanoAinda não há avaliações
- Fuzzy Logic Controller Based On Voltage Source Converter-Hvdc SystemDocumento7 páginasFuzzy Logic Controller Based On Voltage Source Converter-Hvdc SystemBhuvneshRathoreAinda não há avaliações
- Performance Analysis of Z Source Inverter Fed Induction Motor DriveDocumento6 páginasPerformance Analysis of Z Source Inverter Fed Induction Motor DriveNagulapati KiranAinda não há avaliações
- Design of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterDocumento4 páginasDesign of Sinusoidal Pulse Width Modulation 3 Phase Bridge InverterLawson SangoAinda não há avaliações
- Mitigation of Voltage Sag and Voltage Swell by Using D-Statcom and PWM Switched Auto TransformerDocumento11 páginasMitigation of Voltage Sag and Voltage Swell by Using D-Statcom and PWM Switched Auto TransformerGanesh KumarAinda não há avaliações
- Igbt Based On Vector Control of Induction Motor DriveDocumento8 páginasIgbt Based On Vector Control of Induction Motor DriveesatjournalsAinda não há avaliações
- Abc-Dq and Dq-AbcDocumento10 páginasAbc-Dq and Dq-Abcvvps777Ainda não há avaliações
- Engineering Journal Modeling, Control and Steady State Analysis of Back To Back VSC HVDC SystemDocumento6 páginasEngineering Journal Modeling, Control and Steady State Analysis of Back To Back VSC HVDC SystemEngineering JournalAinda não há avaliações
- Nan Kalayar HlaingDocumento5 páginasNan Kalayar HlaingThet TinAinda não há avaliações
- Shunt Compensation For Power Quality Improvement Using A Statcom ControllerDocumento5 páginasShunt Compensation For Power Quality Improvement Using A Statcom ControllericaroigorAinda não há avaliações
- Hysteresis Current Control of The Single-Phase Voltage Source Inverter Using Emegasim Real-Time SimulatorDocumento6 páginasHysteresis Current Control of The Single-Phase Voltage Source Inverter Using Emegasim Real-Time SimulatorDanilo PequenoAinda não há avaliações
- Design of SPWM Based Three Phase Inverter Model: Tanuhsree Bhattacharjee Dr. Majid Jamil Dr. Anup JanaDocumento6 páginasDesign of SPWM Based Three Phase Inverter Model: Tanuhsree Bhattacharjee Dr. Majid Jamil Dr. Anup JanaandersonAinda não há avaliações
- Power Quality Improvement of Distribution System Using D-STATCOMDocumento11 páginasPower Quality Improvement of Distribution System Using D-STATCOMShashankAinda não há avaliações
- 119 1460963615 - 18-04-2016 PDFDocumento4 páginas119 1460963615 - 18-04-2016 PDFEditor IJRITCCAinda não há avaliações
- PWM Current Control Techniques of Voltage Source Converters-A SurveyDocumento6 páginasPWM Current Control Techniques of Voltage Source Converters-A SurveyPhạm Văn TưởngAinda não há avaliações
- 23D AdvanceDocumento8 páginas23D AdvancePATEL SWAPNEELAinda não há avaliações
- Analysis, Simulation and Comparison of Conventional and SVPWM On STATCOM Operation With Linear LoadsDocumento4 páginasAnalysis, Simulation and Comparison of Conventional and SVPWM On STATCOM Operation With Linear LoadsSani1248Ainda não há avaliações
- Implementation of Flux-Charge Control Model To Multifunctional Dynamic Voltage Restorer For Emergency Control in Distribution SystemsDocumento6 páginasImplementation of Flux-Charge Control Model To Multifunctional Dynamic Voltage Restorer For Emergency Control in Distribution SystemsIJMERAinda não há avaliações
- DC Voltage Control and Stability Analysis of PWM-voltage-type Reversible RectifiersDocumento12 páginasDC Voltage Control and Stability Analysis of PWM-voltage-type Reversible RectifiersAli ErAinda não há avaliações
- BH4201396402 PDFDocumento7 páginasBH4201396402 PDFdewiAinda não há avaliações
- Articol 1Documento6 páginasArticol 1Pan De LaAinda não há avaliações
- Controle of Single Phase InvetereDocumento6 páginasControle of Single Phase InvetereNasirUddinAinda não há avaliações
- PWM Rectifiers Improve Power QualityDocumento11 páginasPWM Rectifiers Improve Power QualityJeannot MpianaAinda não há avaliações
- Survey of Control Methods For DC-DC Converters: KeywordsDocumento6 páginasSurvey of Control Methods For DC-DC Converters: KeywordsBernardo GalvanoAinda não há avaliações
- analysis-and-application-of-a-new-control-method-for-continuousmDocumento7 páginasanalysis-and-application-of-a-new-control-method-for-continuousmezloy80Ainda não há avaliações
- Power System Operation and ControlDocumento14 páginasPower System Operation and ControlNumber But100% (1)
- Closed Loop Buck & Boost Converter Mathematical Modeling, Analysis and Simulation Using MATLABDocumento9 páginasClosed Loop Buck & Boost Converter Mathematical Modeling, Analysis and Simulation Using MATLAB7031 GauravAinda não há avaliações
- A Novel Strategy For Three Phase Grid Connected Pulse Width Modulated VSI2018Documento4 páginasA Novel Strategy For Three Phase Grid Connected Pulse Width Modulated VSI2018DrRitesh DashAinda não há avaliações
- Nachiappan 2012Documento6 páginasNachiappan 201220131D5201 ALAMANDA BHARGAVAAinda não há avaliações
- Ijater 04 22 PDFDocumento6 páginasIjater 04 22 PDFtamann2004Ainda não há avaliações
- IJRET V/Hz control of AC induction motorDocumento7 páginasIJRET V/Hz control of AC induction motoredi ediAinda não há avaliações
- Transfer Function Model of Power TransformerDocumento7 páginasTransfer Function Model of Power TransformernambiyurrAinda não há avaliações
- Microcontroller-Based Power Factor CorrectionDocumento26 páginasMicrocontroller-Based Power Factor CorrectionPooja Ban100% (1)
- DC Motor Speed Control Using Microcontroller: AbstractDocumento5 páginasDC Motor Speed Control Using Microcontroller: AbstractGabi CiobanuAinda não há avaliações
- A Low Cost High Efficiency Inverter For Photovoltaic ApplicationsDocumento6 páginasA Low Cost High Efficiency Inverter For Photovoltaic ApplicationsbpchimeraAinda não há avaliações
- A New Control Strategy For Voltage-Type PWM Rectifiers To Realize Zero Steady-State Control Error in Input CurrentDocumento7 páginasA New Control Strategy For Voltage-Type PWM Rectifiers To Realize Zero Steady-State Control Error in Input Currentmipanduro7224Ainda não há avaliações
- Critical Bandwidth For The Load Transient Response of VRMDocumento8 páginasCritical Bandwidth For The Load Transient Response of VRMharis13harisAinda não há avaliações
- 06533563Documento8 páginas06533563MadhavanIceAinda não há avaliações
- A Variable Switching Frequency With Boost Power Factor Correction ConverterDocumento8 páginasA Variable Switching Frequency With Boost Power Factor Correction ConverterJaya AhujaAinda não há avaliações
- Cascaded 5-Level Inverter Type Dstatcom For Power Quality ImprovementDocumento5 páginasCascaded 5-Level Inverter Type Dstatcom For Power Quality ImprovementSiri SarojaAinda não há avaliações
- Switching Control of Inverter Using SPWM Technique: © 2015 IJIRT - Volume 1 Issue 12 - ISSN: 2349-6002Documento8 páginasSwitching Control of Inverter Using SPWM Technique: © 2015 IJIRT - Volume 1 Issue 12 - ISSN: 2349-6002WasimAinda não há avaliações
- Simulation of HVDC Control and Transmission Lines Protection Based On Pscad/EmtdcDocumento4 páginasSimulation of HVDC Control and Transmission Lines Protection Based On Pscad/EmtdcMani AshouriAinda não há avaliações
- Voltage Control Techniques Session 1Documento23 páginasVoltage Control Techniques Session 1Sumit SinghAinda não há avaliações
- Preprints201808 0288 v1Documento7 páginasPreprints201808 0288 v1shamim samAinda não há avaliações
- Average Current-Mode Control PDFDocumento8 páginasAverage Current-Mode Control PDFQuickerManAinda não há avaliações
- DC Motor Control Using Arduino: 1) IntroductionDocumento10 páginasDC Motor Control Using Arduino: 1) IntroductionSoeAyeAinda não há avaliações
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetAinda não há avaliações
- Simulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNo EverandSimulation of Some Power Electronics Case Studies in Matlab Simpowersystem BlocksetNota: 2 de 5 estrelas2/5 (1)
- Some Power Electronics Case Studies Using Matlab Simpowersystem BlocksetNo EverandSome Power Electronics Case Studies Using Matlab Simpowersystem BlocksetAinda não há avaliações
- Modern Control of DC-Based Power Systems: A Problem-Based ApproachNo EverandModern Control of DC-Based Power Systems: A Problem-Based ApproachAinda não há avaliações
- Introduction to Power System ProtectionNo EverandIntroduction to Power System ProtectionAinda não há avaliações
- SOLAR2Documento1 páginaSOLAR2Hassan SouleymanAinda não há avaliações
- Project Management ProcessDocumento14 páginasProject Management ProcessHassan SouleymanAinda não há avaliações
- Utilization FactorDocumento6 páginasUtilization FactorHassan SouleymanAinda não há avaliações
- Terasaki 2019 Price List - PL0219 PDFDocumento226 páginasTerasaki 2019 Price List - PL0219 PDFRita VillaAinda não há avaliações
- Admnistration Lighting SFDocumento1 páginaAdmnistration Lighting SFHassan SouleymanAinda não há avaliações
- A.02 E - 06 - Typical Schematic Diagram LayoutDocumento1 páginaA.02 E - 06 - Typical Schematic Diagram LayoutHassan SouleymanAinda não há avaliações
- GGGI Internship OED ExternalDocumento2 páginasGGGI Internship OED ExternalHassan SouleymanAinda não há avaliações
- LKMPDocumento6 páginasLKMPHassan SouleymanAinda não há avaliações
- Buhanga PDF PDFDocumento1 páginaBuhanga PDF PDFHassan SouleymanAinda não há avaliações
- DBDocumento1 páginaDBHassan SouleymanAinda não há avaliações
- Electric Power SystemsDocumento5 páginasElectric Power SystemsHassan SouleymanAinda não há avaliações
- EuropeAid CV GuidanceDocumento1 páginaEuropeAid CV GuidanceHassan SouleymanAinda não há avaliações
- Rwanda Grid Code Final PDFDocumento314 páginasRwanda Grid Code Final PDFHassan SouleymanAinda não há avaliações
- 5-Step Project Development OverviewDocumento87 páginas5-Step Project Development OverviewwilbertAinda não há avaliações
- The Real Final Year Project PDFDocumento92 páginasThe Real Final Year Project PDFHassan SouleymanAinda não há avaliações
- Solar Water Pump: Ingle Phase InductionDocumento2 páginasSolar Water Pump: Ingle Phase InductionHassan SouleymanAinda não há avaliações
- Jeannine Uwibambe PDFDocumento94 páginasJeannine Uwibambe PDFHassan SouleymanAinda não há avaliações
- Mixed Pressure Control System For A Centrifugal Pump: Levon Gevorkov, Valery VodovozovDocumento6 páginasMixed Pressure Control System For A Centrifugal Pump: Levon Gevorkov, Valery VodovozovHassan SouleymanAinda não há avaliações
- SB30 50TL 21 BE en 11 PDFDocumento60 páginasSB30 50TL 21 BE en 11 PDFHassan SouleymanAinda não há avaliações
- Explorer BA en 17Documento59 páginasExplorer BA en 17ronaldmarcelleAinda não há avaliações
- XiwenDocumento8 páginasXiwenHassan SouleymanAinda não há avaliações
- HLTV ReadmeDocumento9 páginasHLTV Readmewillquem16100% (4)
- Load CalculationDocumento1 páginaLoad CalculationHassan SouleymanAinda não há avaliações
- Study of The Centrifugal Pump Efficiency at Throttling and Speed ControlDocumento4 páginasStudy of The Centrifugal Pump Efficiency at Throttling and Speed ControlHassan SouleymanAinda não há avaliações
- Photovoltaic Powered Centrifugal Water Pump: Probeer Sahw and Prerna GaurDocumento8 páginasPhotovoltaic Powered Centrifugal Water Pump: Probeer Sahw and Prerna GaurHassan SouleymanAinda não há avaliações
- 222222Documento8 páginas222222Hassan SouleymanAinda não há avaliações
- Solar Micro InverterDocumento23 páginasSolar Micro InverterHassan SouleymanAinda não há avaliações
- 4 Isem2016id254 JamelDocumento14 páginas4 Isem2016id254 JamelHassan SouleymanAinda não há avaliações
- 4-ISEM2016ID177 MabvutoDocumento13 páginas4-ISEM2016ID177 MabvutoHassan SouleymanAinda não há avaliações
- v100 Ku-to-Ka Convertible: Installation and Operation ManualDocumento159 páginasv100 Ku-to-Ka Convertible: Installation and Operation ManualSergeyAinda não há avaliações
- Infineon-AN2010 09 Automotive IGBT Modules Explanations-An-V1.0-EnDocumento29 páginasInfineon-AN2010 09 Automotive IGBT Modules Explanations-An-V1.0-EnSuman SahaAinda não há avaliações
- Grounding & Shielding of Audio Devices (Rane Systems) PDFDocumento12 páginasGrounding & Shielding of Audio Devices (Rane Systems) PDFkoutsour27Ainda não há avaliações
- MegaSquirt Toyota 22REDocumento22 páginasMegaSquirt Toyota 22REbluebelle2100% (2)
- Dual Channel EMI Filter With ESD Protection CM1485Documento6 páginasDual Channel EMI Filter With ESD Protection CM1485Banyu GeaAinda não há avaliações
- Denyo CatalogueDocumento9 páginasDenyo CatalogueEslam MahfouzAinda não há avaliações
- Series: Direct Solenoid and Solenoid Pilot Operated ValvesDocumento28 páginasSeries: Direct Solenoid and Solenoid Pilot Operated ValvesMike Davidson AnwandterAinda não há avaliações
- Flashing Alarm Annunciator Units With Signal Storage FSB 24/16-24 - P USBDocumento4 páginasFlashing Alarm Annunciator Units With Signal Storage FSB 24/16-24 - P USBm khAinda não há avaliações
- AHURDocumento228 páginasAHURFake AccountAinda não há avaliações
- Evaporadortipocassetter22 2Documento6 páginasEvaporadortipocassetter22 2dom007thyAinda não há avaliações
- CMOS Interview QuestionsDocumento3 páginasCMOS Interview QuestionsAjay G BellamAinda não há avaliações
- Controller Exeron ManualDocumento29 páginasController Exeron ManualSufi Shah Hamid JalaliAinda não há avaliações
- PID Speed ControlDocumento9 páginasPID Speed ControlMilinda Seneviratne100% (1)
- CD4011BCDocumento10 páginasCD4011BCKike DavilaAinda não há avaliações
- Commissioning Standard Test FormatsDocumento1 páginaCommissioning Standard Test FormatsGoogool YAinda não há avaliações
- DG35EC Product Guide EnglishDocumento78 páginasDG35EC Product Guide EnglishSoupramanien KathirvelouAinda não há avaliações
- Level Transmitter With HART and Foundation FIELDbus ProtocolDocumento210 páginasLevel Transmitter With HART and Foundation FIELDbus Protocolsko88Ainda não há avaliações
- P0113 IAT sensor circuit highDocumento8 páginasP0113 IAT sensor circuit highLewis JoseyAinda não há avaliações
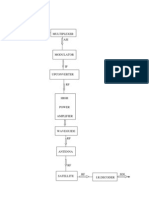
- SDI ASI Encoder MultiplexerDocumento41 páginasSDI ASI Encoder MultiplexerChristie MillerAinda não há avaliações
- A Hybrid Cooperative Spectrum Sensing Technique For Cognitive Radio Networks Using Linear ClassifiersDocumento6 páginasA Hybrid Cooperative Spectrum Sensing Technique For Cognitive Radio Networks Using Linear Classifierssuchi87Ainda não há avaliações
- Machine Experiment 1Documento7 páginasMachine Experiment 1Ujin MalabananAinda não há avaliações
- CPU fan controller project uses PSOC for temperature-based speed controlDocumento4 páginasCPU fan controller project uses PSOC for temperature-based speed controlmantoruleAinda não há avaliações
- Elevator Control Module User's ManualDocumento44 páginasElevator Control Module User's ManualWissam RgailyAinda não há avaliações
- Power Harvester Design For Semi-Passive UHF RFID Tag Using A Tunable Impedance TransformationDocumento5 páginasPower Harvester Design For Semi-Passive UHF RFID Tag Using A Tunable Impedance TransformationM AAinda não há avaliações
- Passive filter design fundamentalsDocumento9 páginasPassive filter design fundamentalsH3C2Ainda não há avaliações
- 6-Pin Wire Harness Assembly Installation GuideDocumento2 páginas6-Pin Wire Harness Assembly Installation Guidelucian stoianofAinda não há avaliações
- Certified Optical Network Training Programme GuideDocumento2 páginasCertified Optical Network Training Programme Guiderikii80Ainda não há avaliações
- IITB EE NewDocumento1 páginaIITB EE NewPLAY LYRICSAinda não há avaliações
- Vtr-100 Installation InstructionsDocumento8 páginasVtr-100 Installation InstructionsKevin DelsouillerAinda não há avaliações
- Week5 Lecture - 3D DesigningDocumento14 páginasWeek5 Lecture - 3D DesigningPatrick MoleAinda não há avaliações