Você também pode gostar
- POO RobocodeDocumento16 páginasPOO RobocodeMatthew HolmesAinda não há avaliações
- Apostila LegoDocumento13 páginasApostila LegoGabriele DanielAinda não há avaliações
- Curso Avançado IRC5Documento123 páginasCurso Avançado IRC5Vinicius BoariAinda não há avaliações
- Um amigo de qualidade para RubyDocumento24 páginasUm amigo de qualidade para RubyIceAinda não há avaliações
- React Native App DevDocumento112 páginasReact Native App Devjorge alvesAinda não há avaliações
- Desenvolvimento APPs AndroidDocumento89 páginasDesenvolvimento APPs AndroidJuliana FrauAinda não há avaliações
- Robocode Manual de InstruçõesDocumento31 páginasRobocode Manual de InstruçõesBrenda AlvesAinda não há avaliações
- Roteiro 01 Sistemas Microprocessados 2023Documento12 páginasRoteiro 01 Sistemas Microprocessados 2023cijoAinda não há avaliações
- Aula 1 - LROI - Apresentao - Renato 2023 1 AlDocumento29 páginasAula 1 - LROI - Apresentao - Renato 2023 1 AlLucas MaiaAinda não há avaliações
- Realidade Aumentada Na Plataforma GNU/Linux.Documento38 páginasRealidade Aumentada Na Plataforma GNU/Linux.Alessandro de Oliveira Faria (A.K.A.CABELO)Ainda não há avaliações
- Material-De-Apoio AndroidDocumento40 páginasMaterial-De-Apoio AndroidAnonymous DlGkiWPBxoAinda não há avaliações
- Capitulo I - Programação de ComputadoresDocumento20 páginasCapitulo I - Programação de Computadoresjames baldeAinda não há avaliações
- Desenvolvendo Jogos Com A Ferramenta RPG Maker VXDocumento197 páginasDesenvolvendo Jogos Com A Ferramenta RPG Maker VXEdney Araujo NepomucenoAinda não há avaliações
- Aula02 UtilizandoCodeBlocksDocumento21 páginasAula02 UtilizandoCodeBlocksGabriel MathiasAinda não há avaliações
- Handshaking robóticoDocumento18 páginasHandshaking robóticoDaniel Juliano de AndradeAinda não há avaliações
- Robocode - Introdução ao ambiente e eventos (40Documento19 páginasRobocode - Introdução ao ambiente e eventos (40Edson PatrícioAinda não há avaliações
- Roteiro - STM32CubeMXDocumento7 páginasRoteiro - STM32CubeMXEduardoAinda não há avaliações
- Aula02-UtilizandoCodeBlocksDocumento21 páginasAula02-UtilizandoCodeBlocksWilliam Roberto MalvezziAinda não há avaliações
- A lógica do jogo: Recriando clássicos da história dos videogamesNo EverandA lógica do jogo: Recriando clássicos da história dos videogamesAinda não há avaliações
- 1.1.5 Lab - Installing The Virtual Machines - PT BRDocumento4 páginas1.1.5 Lab - Installing The Virtual Machines - PT BRAri Leal MatosAinda não há avaliações
- Apostila de Blender 3DDocumento21 páginasApostila de Blender 3DhiagoaraujoAinda não há avaliações
- Prática 1 - Criando Um Projeto No MPLABXDocumento12 páginasPrática 1 - Criando Um Projeto No MPLABXYasmin CamileAinda não há avaliações
- Primeiros passos com programação de robôsDocumento16 páginasPrimeiros passos com programação de robôsFilipeAntunesAinda não há avaliações
- Lab6 Pcid Felipe R Sobrinho 170141764Documento3 páginasLab6 Pcid Felipe R Sobrinho 170141764Felipe Rodrigues SobrinhoAinda não há avaliações
- Simulador de RobôDocumento26 páginasSimulador de RobôLeonardo Figliolino de OliveiraAinda não há avaliações
- Apostila de Android - para Desenvolvimento de Jogos (Free)Documento66 páginasApostila de Android - para Desenvolvimento de Jogos (Free)Apostila de Android80% (5)
- HSM CAM Inventor Tutorial: Autores: Mauro Villa D' Alva Lucas BaggioDocumento66 páginasHSM CAM Inventor Tutorial: Autores: Mauro Villa D' Alva Lucas Baggioseniram2Ainda não há avaliações
- Cap 7 Lab 7.4.7-Lab - Install-The-Virtual-Machine - PT-BRDocumento5 páginasCap 7 Lab 7.4.7-Lab - Install-The-Virtual-Machine - PT-BREdmar BrasilAinda não há avaliações
- SikuliDocumento29 páginasSikuliRegina RodriguesAinda não há avaliações
- Tutorial Quartus - EsquematicoDocumento21 páginasTutorial Quartus - Esquematicoallanffs100% (1)
- Como Criar Um Jogo No RobloxDocumento10 páginasComo Criar Um Jogo No Robloxwagb.msiAinda não há avaliações
- Aprenda Scratch criando um jogo mágicoDocumento20 páginasAprenda Scratch criando um jogo mágicoDinuel Fernandes de CamposAinda não há avaliações
- Introdução ao Processor ExpertDocumento14 páginasIntrodução ao Processor Expertasouza10Ainda não há avaliações
- Processo de Firmware Update em Relés 7SR5Documento3 páginasProcesso de Firmware Update em Relés 7SR5Carlos KaduAinda não há avaliações
- Allegro para IniciantesDocumento24 páginasAllegro para IniciantesLeandro FerreiraAinda não há avaliações
- Sistemas Supervisórios - Aplicação PráticaDocumento19 páginasSistemas Supervisórios - Aplicação PráticaIgor FelipeAinda não há avaliações
- ANDERSON - TCC 2 - Anderson Silva de Souza - Rev03Documento23 páginasANDERSON - TCC 2 - Anderson Silva de Souza - Rev03AndersonAinda não há avaliações
- Ebook - O Guia Descomplicado Da IDE Do ArduinoDocumento17 páginasEbook - O Guia Descomplicado Da IDE Do ArduinoFabianoAinda não há avaliações
- Ic Lab01 Primeiros PassosDocumento5 páginasIc Lab01 Primeiros PassosFloyd CobainAinda não há avaliações
- Implementando Um Sistema De Detecção De MovimentoNo EverandImplementando Um Sistema De Detecção De MovimentoAinda não há avaliações
- Curso Técnico InformáticaDocumento15 páginasCurso Técnico InformáticaWillye FariasAinda não há avaliações
- Cordova CommandsDocumento42 páginasCordova CommandsLuis GuilhermeAinda não há avaliações
- Estudando E Plotando Uma Função Cosseno Programado Em Visual C#No EverandEstudando E Plotando Uma Função Cosseno Programado Em Visual C#Ainda não há avaliações
- Estudando E Plotando Uma Função Logaritmo Programado Em Visual C#No EverandEstudando E Plotando Uma Função Logaritmo Programado Em Visual C#Ainda não há avaliações
- Estudando E Plotando Uma Função Racional Programado Em Visual C#No EverandEstudando E Plotando Uma Função Racional Programado Em Visual C#Ainda não há avaliações
- Gerador de instaladores com ISTool e InnoSetupDocumento14 páginasGerador de instaladores com ISTool e InnoSetupstratocastrAinda não há avaliações
- Estudando E Plotando Uma Função Tangente Programado Em Visual C#No EverandEstudando E Plotando Uma Função Tangente Programado Em Visual C#Ainda não há avaliações
- Oficina WorkTechDocumento61 páginasOficina WorkTechWilton MoreiraAinda não há avaliações
- Elevador Com PicDocumento39 páginasElevador Com PicLuiz Claudio NascimentoAinda não há avaliações
- Integração mini impressora Bluetooth DelphiDocumento10 páginasIntegração mini impressora Bluetooth DelphiMarceloMoreiraCunhaAinda não há avaliações
- Simulando Programação de Microcontroladores PIC no Proteus 7Documento5 páginasSimulando Programação de Microcontroladores PIC no Proteus 7Roberto ZenebreAinda não há avaliações
- Tutorial Obtencao de Oscilografias No DIGSI - SIGRADocumento6 páginasTutorial Obtencao de Oscilografias No DIGSI - SIGRArobertoseniorAinda não há avaliações
- Simulador Rede Virtual para Web 2Documento21 páginasSimulador Rede Virtual para Web 2Jeferson PresottoAinda não há avaliações
- Aula - 1-Introdução Ao OctaveDocumento11 páginasAula - 1-Introdução Ao OctaveLeonardoFernandesAinda não há avaliações
- Laboratório 1 - Programação Arduino Apde7Documento29 páginasLaboratório 1 - Programação Arduino Apde7Daniel Juliano de AndradeAinda não há avaliações
- Estudando E Plotando Uma Função Seno Programado Em Visual C#No EverandEstudando E Plotando Uma Função Seno Programado Em Visual C#Ainda não há avaliações
- Segurança e Auditoria de SistemasDocumento20 páginasSegurança e Auditoria de SistemasGabriel BatistaAinda não há avaliações
- Calculando A Imagem De Uma Função Seno Programado Em Visual C#No EverandCalculando A Imagem De Uma Função Seno Programado Em Visual C#Ainda não há avaliações
- Remote API - Funcionamento No CoppeliaDocumento8 páginasRemote API - Funcionamento No CoppeliaLeandro SantanaAinda não há avaliações
- Apostila Cal IIIDocumento52 páginasApostila Cal IIICarlos SouzaAinda não há avaliações
- EfluentesDocumento47 páginasEfluentesCarlos SouzaAinda não há avaliações
- Lista de ExercíciosDocumento20 páginasLista de ExercíciosCarlos SouzaAinda não há avaliações
- (Cliqueapostilas - Com.br) A Fisica Do ViolinoDocumento75 páginas(Cliqueapostilas - Com.br) A Fisica Do ViolinoCarlos SouzaAinda não há avaliações
- Materialdeestudo IntroducaoaroboticaDocumento7 páginasMaterialdeestudo Introducaoaroboticaofernandes2Ainda não há avaliações
- Simulação de célula robótica de soldagemDocumento8 páginasSimulação de célula robótica de soldagemCarlos SouzaAinda não há avaliações
- Circulo de MOHRDocumento30 páginasCirculo de MOHRCarlos Souza50% (2)
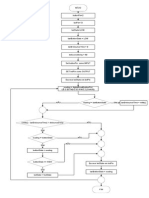
- Fluxograma DebounceDocumento1 páginaFluxograma DebounceCarlos SouzaAinda não há avaliações
- Sugestão de Leitura Da Aula 15 - Apostila Harmônicas - SchneiderDocumento19 páginasSugestão de Leitura Da Aula 15 - Apostila Harmônicas - Schneiderjefao_MMAAinda não há avaliações
- Processo de fundiçãoDocumento70 páginasProcesso de fundiçãoThiago O PontesAinda não há avaliações
- Guia completo para sistemas de ar comprimidoDocumento60 páginasGuia completo para sistemas de ar comprimidorenatozim100% (1)
- Aula Mecanica AplicadaDocumento5 páginasAula Mecanica AplicadaCarlos SouzaAinda não há avaliações
- Comandos Eletricos 1Documento65 páginasComandos Eletricos 1Carlos Alberto24100% (2)
- Apostila de InstrumentaçãoDocumento55 páginasApostila de InstrumentaçãoCarlos SouzaAinda não há avaliações
- Especificações BH210i trator agrícolaDocumento2 páginasEspecificações BH210i trator agrícolaPaulo Calado67% (3)
- Caracterização técnica do parque eólico Renascença VDocumento18 páginasCaracterização técnica do parque eólico Renascença VGildo FreitasAinda não há avaliações
- Problemas de CorrelacionamentoDocumento2 páginasProblemas de CorrelacionamentomarianavitaliAinda não há avaliações
- Seguranca Ponte Rolante PDFDocumento12 páginasSeguranca Ponte Rolante PDFKatia AguiarAinda não há avaliações
- p.20 - OU 2010.2Documento1 páginap.20 - OU 2010.2macieirafla100% (2)
- Protecção Instalações ElétricasDocumento24 páginasProtecção Instalações ElétricasHenrique PereiraAinda não há avaliações
- Procedimento Sangria FordDocumento8 páginasProcedimento Sangria FordMaicon MedeirosAinda não há avaliações
- 00000018Documento62 páginas00000018george smilianskyAinda não há avaliações
- Relatorio Aula Prática - InstrucoesDocumento1 páginaRelatorio Aula Prática - InstrucoesAna Paula CunhaAinda não há avaliações
- Rexroth - Perfis de Aluminio-PortugDocumento64 páginasRexroth - Perfis de Aluminio-PortugsandroaptAinda não há avaliações
- Bombas INI-HT Soluções em bombeamento de óleo térmicoDocumento8 páginasBombas INI-HT Soluções em bombeamento de óleo térmicoLuis M Cáceres ChAinda não há avaliações
- Memorial Descritivo CisternaDocumento7 páginasMemorial Descritivo CisternaJelton ScheidtAinda não há avaliações
- Diferenças ISO 9000 x 14000Documento8 páginasDiferenças ISO 9000 x 14000Adalton FernandoAinda não há avaliações
- Hops 0 25 - AndaimeDocumento2 páginasHops 0 25 - AndaimepauloAinda não há avaliações
- Apostila de Alarme ResidencialDocumento12 páginasApostila de Alarme ResidencialrodrigoevilAinda não há avaliações
- Agricultura de Precisão Na SemeaduraDocumento33 páginasAgricultura de Precisão Na SemeaduraAlmirAinda não há avaliações
- Comunicação de Documentos de Transporte à ATDocumento0 páginaComunicação de Documentos de Transporte à ATrdc02271Ainda não há avaliações
- Aquafortis Eco V02Documento7 páginasAquafortis Eco V02Lúcio Di LoretoAinda não há avaliações
- Parkside Pabh 18 Li A1Documento90 páginasParkside Pabh 18 Li A1CarpeDiem82Ainda não há avaliações
- Material Didatico GruaDocumento32 páginasMaterial Didatico GruaMarcos Aurelio100% (15)
- Granularidade PDFDocumento51 páginasGranularidade PDFLeandro AnnaAinda não há avaliações
- NBR 14800 - Reservatorio Poliolefinico para Agua Potavel - Instalacao em ObraDocumento5 páginasNBR 14800 - Reservatorio Poliolefinico para Agua Potavel - Instalacao em ObraAndreArmaniniAinda não há avaliações
- Protheus - Nomes e Descrições das Tabelas do ERP TOTVSDocumento14 páginasProtheus - Nomes e Descrições das Tabelas do ERP TOTVSCelio De Jesus Silva100% (1)
- Reparos Estruturais AeronáuticaDocumento46 páginasReparos Estruturais AeronáuticaVALDEMIRAinda não há avaliações
- Manual de instruções central de alarme de incêndioDocumento32 páginasManual de instruções central de alarme de incêndioMario RichardAinda não há avaliações
- Guia completo para instalação e uso de sauna a vaporDocumento18 páginasGuia completo para instalação e uso de sauna a vaporReuel LuizAinda não há avaliações
- Agregados e FillerDocumento22 páginasAgregados e FillerNando Almeida AlmeidaAinda não há avaliações
- Modificação de Embreagens (Randon) ModificadaDocumento4 páginasModificação de Embreagens (Randon) ModificadaLuis OmenaAinda não há avaliações
- Exercício 4 Revisão para ProvaDocumento4 páginasExercício 4 Revisão para ProvaHilcard MedeirosAinda não há avaliações
- Catálogo de peças para máquinas agrícolasDocumento139 páginasCatálogo de peças para máquinas agrícolasLuiz MagalhãesAinda não há avaliações