Você também pode gostar
- Predictive Modelling For LMBDocumento2 páginasPredictive Modelling For LMBJoyjeet RoyAinda não há avaliações
- ON-LINE APPLICATION FOR SBI - Specialist Officers: Recruitment of Specialist Cadre Officers in State Bank GroupDocumento3 páginasON-LINE APPLICATION FOR SBI - Specialist Officers: Recruitment of Specialist Cadre Officers in State Bank GroupJoyjeet RoyAinda não há avaliações
- Predictive Analytics Methdology Using R v1.0Documento30 páginasPredictive Analytics Methdology Using R v1.0Joyjeet RoyAinda não há avaliações
- India TalkDocumento16 páginasIndia TalksilberksouzaAinda não há avaliações
- CDBM WorkbookDocumento58 páginasCDBM WorkbookGourav SahaAinda não há avaliações
- Consumer Equilibrium and The Law of EquiDocumento3 páginasConsumer Equilibrium and The Law of EquiJoyjeet RoyAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Rational Expectation TheoryDocumento7 páginasRational Expectation TheoryIsmith PokhrelAinda não há avaliações
- Adi Automotive Sensor Solutions - enDocumento6 páginasAdi Automotive Sensor Solutions - enservice autoAinda não há avaliações
- MinePlan Release NotesDocumento14 páginasMinePlan Release NotesJuanJo RoblesAinda não há avaliações
- The Relative Pricing of High-Yield Debt: The Case of RJR Nabisco Holdings Capital CorporationDocumento24 páginasThe Relative Pricing of High-Yield Debt: The Case of RJR Nabisco Holdings Capital CorporationAhsen Ali Siddiqui100% (1)
- Dynamic Analysis of Motor Floor: Structure DataDocumento6 páginasDynamic Analysis of Motor Floor: Structure Datap_ignatiusAinda não há avaliações
- EL Bay-O-Net Current-Limiting Fuse Assembly - CA132039ENDocumento4 páginasEL Bay-O-Net Current-Limiting Fuse Assembly - CA132039ENfederico4thAinda não há avaliações
- Calculation of Optimum Fishing TimeDocumento11 páginasCalculation of Optimum Fishing TimeÇağlar Öztürk100% (2)
- 3-Crankcase & CrankshaftDocumento41 páginas3-Crankcase & CrankshaftMehar Tariq GoheerAinda não há avaliações
- Women Security Assistance System With GPS Tracking and Messaging SystemDocumento4 páginasWomen Security Assistance System With GPS Tracking and Messaging Systemhamed razaAinda não há avaliações
- Basic Probability and Reliability Concepts: Roy Billinton Power System Research Group University of Saskatchewan CanadaDocumento248 páginasBasic Probability and Reliability Concepts: Roy Billinton Power System Research Group University of Saskatchewan CanadaSimon van BentenAinda não há avaliações
- Service Manual New Sigma-Control 2Documento132 páginasService Manual New Sigma-Control 2gil_bar_t0% (3)
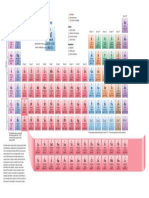
- Periodic TableDocumento1 páginaPeriodic TableChemist MookaAinda não há avaliações
- Maths Comparison Summary ReportDocumento274 páginasMaths Comparison Summary ReportShahrukh MunirAinda não há avaliações
- 11.rolling Disc SolutionDocumento12 páginas11.rolling Disc SolutionAlimin AnniAinda não há avaliações
- MBA (Travel & Tourism) 1st Year Sylabus 2020-21 - 28th SeptDocumento34 páginasMBA (Travel & Tourism) 1st Year Sylabus 2020-21 - 28th SeptHimanshuAinda não há avaliações
- PLC Introduction: Programmable Logic Controller BasicsDocumento3 páginasPLC Introduction: Programmable Logic Controller Basicssreekanthtg007Ainda não há avaliações
- Product Manual For Resilient Seated Cast Iron Air Relief Valves For Water Works Purposes ACCORDING TO IS 14845: 2000Documento5 páginasProduct Manual For Resilient Seated Cast Iron Air Relief Valves For Water Works Purposes ACCORDING TO IS 14845: 2000Tanmoy DuttaAinda não há avaliações
- BA (Hons) Philosophy CurriculumDocumento123 páginasBA (Hons) Philosophy CurriculumDARSHAN RAAJANAinda não há avaliações
- Vector Integration - GATE Study Material in PDFDocumento10 páginasVector Integration - GATE Study Material in PDFTestbook BlogAinda não há avaliações
- Microsoft Office Tips and TricksDocumento12 páginasMicrosoft Office Tips and TricksJayr BVAinda não há avaliações
- Homework Lesson 6-10Documento9 páginasHomework Lesson 6-10Valerie YenshawAinda não há avaliações
- Survey Whole Circle BearingDocumento19 páginasSurvey Whole Circle BearingVin GaragiAinda não há avaliações
- Blockchain Technology For Cloud Storage - A Systematic Literature ReviewDocumento33 páginasBlockchain Technology For Cloud Storage - A Systematic Literature ReviewNgocAinda não há avaliações
- Basic Chemistry Review (Students)Documento16 páginasBasic Chemistry Review (Students)AnilovRozovaAinda não há avaliações
- Bar BendingDocumento142 páginasBar Bendingjaffna100% (4)
- Sisweb Sisweb Techdoc Techdoc Print Pag - pdf1Documento91 páginasSisweb Sisweb Techdoc Techdoc Print Pag - pdf1MatiussChesteerAinda não há avaliações
- Mid Drive Vs HubDocumento15 páginasMid Drive Vs HubRivan PamungkasAinda não há avaliações
- Measuring AssignmentDocumento3 páginasMeasuring AssignmentArnab BhattacharyaAinda não há avaliações
- Performance comparison of bored and excavated pilesDocumento10 páginasPerformance comparison of bored and excavated pilesDavid Aponte RojasAinda não há avaliações