Você também pode gostar
- Factorization Methods for Discrete Sequential EstimationNo EverandFactorization Methods for Discrete Sequential EstimationAinda não há avaliações
- CH 3 Script M-FilesDocumento40 páginasCH 3 Script M-Files김상권Ainda não há avaliações
- Real Computing Made Real: Preventing Errors in Scientific and Engineering CalculationsNo EverandReal Computing Made Real: Preventing Errors in Scientific and Engineering CalculationsNota: 3 de 5 estrelas3/5 (1)
- MATLAB Linear AlgebraDocumento39 páginasMATLAB Linear AlgebraRaine OrtegaAinda não há avaliações
- Clang TutorialDocumento44 páginasClang Tutorialatom tuxAinda não há avaliações
- 2D Euler Riemann RoeDocumento72 páginas2D Euler Riemann RoeJRAinda não há avaliações
- The Fokker-Planck EquationDocumento12 páginasThe Fokker-Planck EquationslamAinda não há avaliações
- Ansys Workbench Lecture NotesDocumento13 páginasAnsys Workbench Lecture Notessunil_mahadikarAinda não há avaliações
- TR172 FellDocumento279 páginasTR172 FellAmey GudigarAinda não há avaliações
- Group Theory PDFDocumento280 páginasGroup Theory PDFLuis Cancino Arancibia100% (1)
- Fem Formulae PDFDocumento12 páginasFem Formulae PDFvamsi krishnaAinda não há avaliações
- PyCUDA TutorialDocumento15 páginasPyCUDA TutorialPhtRaveller100% (1)
- Euler Equations in Fluid DynamicsDocumento9 páginasEuler Equations in Fluid Dynamicsrr1819Ainda não há avaliações
- Fortran ProgramDocumento9 páginasFortran ProgramSandip PaulAinda não há avaliações
- PLplot-5 3 1Documento178 páginasPLplot-5 3 1Ezequiel OcañasAinda não há avaliações
- Computational Fluid DynamicsDocumento4 páginasComputational Fluid DynamicsperrychemAinda não há avaliações
- C Track: Using The Program.: MmaakkeeDocumento5 páginasC Track: Using The Program.: MmaakkeeEric PierceAinda não há avaliações
- Finite Volume Book PDFDocumento237 páginasFinite Volume Book PDFRajesh SharmaAinda não há avaliações
- Legendre Transformation IntroDocumento14 páginasLegendre Transformation Introutbeast100% (1)
- Unit 2 Test Quadratics ReviewDocumento7 páginasUnit 2 Test Quadratics ReviewMichael Zebra100% (1)
- Intro To Advanced Applied Algorithms Nitk 2013Documento1.908 páginasIntro To Advanced Applied Algorithms Nitk 2013Delenzy CinoAinda não há avaliações
- Open FoamDocumento9 páginasOpen Foamsuresh_501Ainda não há avaliações
- Computational MechanicsDocumento31 páginasComputational MechanicsAlexander NarváezAinda não há avaliações
- SnappyHexMesh Multi RegionDocumento25 páginasSnappyHexMesh Multi RegionmimoAinda não há avaliações
- Theory of Equations 2Documento27 páginasTheory of Equations 2api-3810665Ainda não há avaliações
- Book Name 4 C C++Documento6 páginasBook Name 4 C C++kpopescoAinda não há avaliações
- Bash Reference Manual: Chet Ramey, Case Western Reserve University Brian Fox, Free Software FoundationDocumento166 páginasBash Reference Manual: Chet Ramey, Case Western Reserve University Brian Fox, Free Software FoundationnintynintyAinda não há avaliações
- TCLDocumento13 páginasTCLYc ChenAinda não há avaliações
- Practical Linear AlgebraDocumento253 páginasPractical Linear Algebrael_greco1982Ainda não há avaliações
- Tutorial of Unix/Linux: Cédric Notredame (Adapted From NOMURA)Documento40 páginasTutorial of Unix/Linux: Cédric Notredame (Adapted From NOMURA)Miguel Angel Rodriguez BautistaAinda não há avaliações
- OdeDocumento47 páginasOdeReiniel AllanicAinda não há avaliações
- Introduction To Makefiles From Lab 04Documento31 páginasIntroduction To Makefiles From Lab 04TOPKEKAinda não há avaliações
- Essential Checking of Finite Element AnalysisDocumento13 páginasEssential Checking of Finite Element Analysisjanaaidaas1996Ainda não há avaliações
- Wave MotionDocumento32 páginasWave Motionanoopanu1990Ainda não há avaliações
- Introduction To Fortran: Ed Kornkven PHYS F693 Spring 2004Documento25 páginasIntroduction To Fortran: Ed Kornkven PHYS F693 Spring 2004Paul Allen ChavitAinda não há avaliações
- تعليم العناصر المنتهية PDFDocumento197 páginasتعليم العناصر المنتهية PDFZaid HadiAinda não há avaliações
- Introduction To The Gedit EditorDocumento51 páginasIntroduction To The Gedit Editortonitt100% (1)
- Cayley Graphs of Groups and Their ApplicationsDocumento47 páginasCayley Graphs of Groups and Their ApplicationsAnjeliAinda não há avaliações
- Section 3. Fourier Series and Periodic Functions: F (X) F (X + P) For Any X, and Fixed Period PDocumento31 páginasSection 3. Fourier Series and Periodic Functions: F (X) F (X + P) For Any X, and Fixed Period PboucyAinda não há avaliações
- Chapter 2 Discretization of The DomainDocumento21 páginasChapter 2 Discretization of The DomainMohamed Osama100% (2)
- OSSS Manual 1 OpenFOAMDocumento15 páginasOSSS Manual 1 OpenFOAMDavid Agudo del rioAinda não há avaliações
- Martin Starzewski Microstructural RandomnessDocumento500 páginasMartin Starzewski Microstructural RandomnessAjith MosesAinda não há avaliações
- Week 02 Jupyter NotebooksDocumento15 páginasWeek 02 Jupyter NotebooksguliguruAinda não há avaliações
- Python IgraphDocumento429 páginasPython IgraphMax GrecoAinda não há avaliações
- Applied Numerical MethodsDocumento464 páginasApplied Numerical Methodstobby20621Ainda não há avaliações
- BeamerDocumento109 páginasBeamerThanin KuphoonsapAinda não há avaliações
- Curve FitDocumento667 páginasCurve FitYuvarekha Senthilkumar100% (1)
- Introduction To Partial Differential Equations With MatlabDocumento6 páginasIntroduction To Partial Differential Equations With MatlabOmar Sánchez Rodríguez0% (1)
- PyFEM PDFDocumento22 páginasPyFEM PDFno_milk_todayAinda não há avaliações
- Graphics Programming Throw Open GLDocumento156 páginasGraphics Programming Throw Open GLPankaj Jain100% (1)
- Gradient, Divergence, and CurlDocumento1 páginaGradient, Divergence, and CurlkemooAinda não há avaliações
- Computational MHDDocumento66 páginasComputational MHDverthex20992828Ainda não há avaliações
- Introduction To Calculus of Vector FieldsDocumento46 páginasIntroduction To Calculus of Vector Fieldssalem aljohiAinda não há avaliações
- Full Analyse of JULIADocumento19 páginasFull Analyse of JULIArenan55026Ainda não há avaliações
- Review PDFDocumento200 páginasReview PDFbenicilloAinda não há avaliações
- The University of Edinburgh Dynamical Systems Problem SetDocumento4 páginasThe University of Edinburgh Dynamical Systems Problem SetHaaziquah TahirAinda não há avaliações
- 16 Higher Order Schemes - ADocumento24 páginas16 Higher Order Schemes - Aalagarg137691Ainda não há avaliações
- Imperial College London Bsc/Msci Examination June 2018 Mph2 Mathematical MethodsDocumento6 páginasImperial College London Bsc/Msci Examination June 2018 Mph2 Mathematical MethodsRoy VeseyAinda não há avaliações
- Unit 5 SCHRODINGER EQUATIONDocumento4 páginasUnit 5 SCHRODINGER EQUATIONpaverrys8Ainda não há avaliações
- Assignment 7Documento2 páginasAssignment 7vpn userAinda não há avaliações
- Fluor. 000.215.1233. Vibrating Machinery Foundations On Soil. 2005Documento74 páginasFluor. 000.215.1233. Vibrating Machinery Foundations On Soil. 2005NicolasAinda não há avaliações
- Fluor. 000.215.1234. Vibrating Machinery Foundations On Soil. 2005Documento89 páginasFluor. 000.215.1234. Vibrating Machinery Foundations On Soil. 2005NicolasAinda não há avaliações
- Fastening Options: Aisi Calcul Ated Allowable Loads For Screw ConnectionDocumento3 páginasFastening Options: Aisi Calcul Ated Allowable Loads For Screw ConnectionNicolasAinda não há avaliações
- Sol ExactDocumento1 páginaSol ExactNicolasAinda não há avaliações
- Relative ClausesDocumento4 páginasRelative ClausesNicolasAinda não há avaliações
- Software Verification: EXAMPLE 6-003Documento16 páginasSoftware Verification: EXAMPLE 6-003NicolasAinda não há avaliações
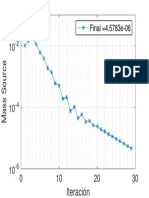
- Mass SourceDocumento1 páginaMass SourceNicolasAinda não há avaliações
- Coef SisDocumento1 páginaCoef SisNicolasAinda não há avaliações
- New Doc 120160401123915755Documento1 páginaNew Doc 120160401123915755NicolasAinda não há avaliações
- M ExperimentalDocumento1 páginaM ExperimentalNicolasAinda não há avaliações
- Diprotic Acid Titration Calculation Worked Example Sulphuric Acid and Sodium Hydroxide - mp4Documento2 páginasDiprotic Acid Titration Calculation Worked Example Sulphuric Acid and Sodium Hydroxide - mp4tobiloba temiAinda não há avaliações
- Chem 101 Lab 12 Gas LawsDocumento12 páginasChem 101 Lab 12 Gas LawsT Josiah RichardsonAinda não há avaliações
- 20 Examples of Law of Inertia in Everyday LifeDocumento9 páginas20 Examples of Law of Inertia in Everyday LifePraxiLabsAinda não há avaliações
- Assignment On LASER (PH:102) : All The Problems Are From "Optics - Ajoy Ghatak"Documento2 páginasAssignment On LASER (PH:102) : All The Problems Are From "Optics - Ajoy Ghatak"nickky_agrawal52Ainda não há avaliações
- Brassylic Acid PVCDocumento4 páginasBrassylic Acid PVCSudha Raman-ShadakshariAinda não há avaliações
- Experiment 9 Moment of Inertia: Translational Kinetic Energy of The Driving Mass and The Rotational Kinetic Energy of TheDocumento4 páginasExperiment 9 Moment of Inertia: Translational Kinetic Energy of The Driving Mass and The Rotational Kinetic Energy of Themuhammad faizal akbarAinda não há avaliações
- What Are AminesDocumento16 páginasWhat Are AminesKristine Faye LeybagAinda não há avaliações
- Hydraulics ManualDocumento42 páginasHydraulics ManualJm Cayapas100% (2)
- Bundle 2 Review - KEYDocumento4 páginasBundle 2 Review - KEYABHISHEK SinghAinda não há avaliações
- Khalid Yousaf BS Civil Engineering The University of Lahore 1-km Raiwind Road LahoreDocumento83 páginasKhalid Yousaf BS Civil Engineering The University of Lahore 1-km Raiwind Road LahoreKhalid Yousaf100% (1)
- Gamma RayDocumento12 páginasGamma RayKevinAinda não há avaliações
- The Hopfield Model - Emin Orhan - 2014 PDFDocumento11 páginasThe Hopfield Model - Emin Orhan - 2014 PDFJon Arnold GreyAinda não há avaliações
- Powder MetallurgyDocumento33 páginasPowder MetallurgyMohanakumara K CAinda não há avaliações
- FB 19 - ElectronicsDocumento2 páginasFB 19 - ElectronicsJohn Brix BalisterosAinda não há avaliações
- Semiconductor Devices-Module-2 PDFDocumento53 páginasSemiconductor Devices-Module-2 PDFShivam KumarAinda não há avaliações
- 318 Sample-Chapter PDFDocumento70 páginas318 Sample-Chapter PDFjuanAinda não há avaliações
- Unit 8: Mechanical Principles: Deadlines: Assignment One: 24Documento44 páginasUnit 8: Mechanical Principles: Deadlines: Assignment One: 24Jo okAinda não há avaliações
- Fraktal Field Science Fractal UTufan GuvenDocumento147 páginasFraktal Field Science Fractal UTufan GuvenStephen J. RobertsAinda não há avaliações
- Water - Its Structure and PropertiesDocumento1 páginaWater - Its Structure and PropertiesRobert BuiAinda não há avaliações
- c2Documento31 páginasc2AssyakurAinda não há avaliações
- Cdna02187enc 001Documento56 páginasCdna02187enc 001Michael BenhamouAinda não há avaliações
- Magnetic Flow Meters: Law of Electromagnetic Induction. Magmeters Can Detect TheDocumento6 páginasMagnetic Flow Meters: Law of Electromagnetic Induction. Magmeters Can Detect TheMichelle MenciasAinda não há avaliações
- Mass PointsDocumento11 páginasMass PointsShreyansh VishwakarmaAinda não há avaliações
- Failure of MaterialsDocumento34 páginasFailure of MaterialsvinayprasadskAinda não há avaliações
- Some Friedel-Crafts Reactions of Y-ButyrolactoneDocumento6 páginasSome Friedel-Crafts Reactions of Y-ButyrolactonedntwntAinda não há avaliações
- Uzan-The Arrow of Time and Meaning PDFDocumento29 páginasUzan-The Arrow of Time and Meaning PDFrochalieberAinda não há avaliações
- Pub - Quantum Mechanics For Chemists PDFDocumento196 páginasPub - Quantum Mechanics For Chemists PDFDouglas SampaioAinda não há avaliações
- Scan 9 Apr 2019 PDFDocumento26 páginasScan 9 Apr 2019 PDFShivam BiswasAinda não há avaliações
- Chem141 ch01 SZBDocumento7 páginasChem141 ch01 SZBVishal VasavdaAinda não há avaliações
- Prediction and Improvement of Steady-State Performance of A Power Controlled Axial Piston PumpDocumento10 páginasPrediction and Improvement of Steady-State Performance of A Power Controlled Axial Piston PumpmadmetroidAinda não há avaliações