Você também pode gostar
- Circuitos Rectificadores y Parametros de RendimientoDocumento43 páginasCircuitos Rectificadores y Parametros de RendimientoMaria Lucia Ospina Sepulveda79% (14)
- Circuitos Rectificadores y Parametros de RendimientoDocumento43 páginasCircuitos Rectificadores y Parametros de RendimientoMaria Lucia Ospina Sepulveda79% (14)
- Solucionario de Dennis G Zill - Ecuaciones DiferencialesDocumento86 páginasSolucionario de Dennis G Zill - Ecuaciones Diferencialesdesigniusk84% (89)
- TcQ8sDH9qwPtcIY1 9yKWmfWvGBO NF3I El 20 Caso 20 de 20 Fondo 20 MarDocumento7 páginasTcQ8sDH9qwPtcIY1 9yKWmfWvGBO NF3I El 20 Caso 20 de 20 Fondo 20 Marmirlene astudillo0% (1)
- Análisis de Circuitos en Ingeniería 3Documento17 páginasAnálisis de Circuitos en Ingeniería 3Walter Arispe Santander0% (1)
- Vibraciones Mecanicas U. ChileDocumento147 páginasVibraciones Mecanicas U. ChileNilo Ortega CruzAinda não há avaliações
- PasantiasDocumento1 páginaPasantiasJerson PaucarAinda não há avaliações
- DESBASTADODocumento24 páginasDESBASTADOJerson PaucarAinda não há avaliações
- 0.1 Introducción A La Ingeniería de OperacionesDocumento20 páginas0.1 Introducción A La Ingeniería de OperacionesJerson PaucarAinda não há avaliações
- Deber 2 ENDDocumento3 páginasDeber 2 ENDJerson PaucarAinda não há avaliações
- LT PresionesDocumento9 páginasLT PresionesJerson PaucarAinda não há avaliações
- Reciclaje de NeumáticosDocumento2 páginasReciclaje de NeumáticosJerson PaucarAinda não há avaliações
- Presentación 1Documento3 páginasPresentación 1Jerson PaucarAinda não há avaliações
- Deformaciones en SoldaduraDocumento20 páginasDeformaciones en SoldaduraAlx D. La Cruz RodríguezAinda não há avaliações
- PasantiasDocumento1 páginaPasantiasJerson PaucarAinda não há avaliações
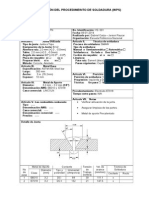
- WPS FormatoDocumento2 páginasWPS FormatoJerson PaucarAinda não há avaliações
- FatigaDocumento78 páginasFatigaJerson PaucarAinda não há avaliações
- Vibraciones MecanicasDocumento12 páginasVibraciones MecanicasNelson Oróstica LafferteAinda não há avaliações
- DesgasteyfallaDocumento764 páginasDesgasteyfallaJerson PaucarAinda não há avaliações
- Qué Es El MegadoDocumento1 páginaQué Es El MegadoJerson PaucarAinda não há avaliações
- DesgasteyfallaDocumento764 páginasDesgasteyfallaJerson PaucarAinda não há avaliações
- BlaBla 5 2aley Maquinas TermicasDocumento7 páginasBlaBla 5 2aley Maquinas TermicasClark Cruz GomezAinda não há avaliações
- Conversion de Unidades1Documento2 páginasConversion de Unidades1Angel ManzanoAinda não há avaliações
- Leyes de KirchoffDocumento2 páginasLeyes de KirchoffJerson PaucarAinda não há avaliações
- Análisis Diferencial en Mecánica de FluidosDocumento75 páginasAnálisis Diferencial en Mecánica de Fluidoschicho640473% (11)
- Folleto Desgaste y Falla - 2014bDocumento31 páginasFolleto Desgaste y Falla - 2014bJerson PaucarAinda não há avaliações
- Guía Prácticas LMFDocumento64 páginasGuía Prácticas LMFhenry_hp_1990Ainda não há avaliações
- Formulas de Mecanica de FluidosDocumento11 páginasFormulas de Mecanica de FluidosPedro Profesor67% (3)
- Teorema PiDocumento12 páginasTeorema PiLuis FernándezAinda não há avaliações
- Redes y SimulacionDocumento3 páginasRedes y SimulacionDavid EzquivelAinda não há avaliações
- Introducción A Los AlgoritmosDocumento44 páginasIntroducción A Los AlgoritmosAlejandro GarcésAinda não há avaliações
- Ensayo Caso HarvardDocumento2 páginasEnsayo Caso HarvardJeyson BautistaAinda não há avaliações
- Catalogo 3Documento23 páginasCatalogo 3Diego FrancoAinda não há avaliações
- Diseño de La Experiencia PDFDocumento4 páginasDiseño de La Experiencia PDFGuerra DavidAinda não há avaliações
- Tarea 2 Sistemas DigitalesDocumento9 páginasTarea 2 Sistemas DigitalesJhulian VillafuerteAinda não há avaliações
- Practica 3Documento3 páginasPractica 3KattH.SwitchfootAinda não há avaliações
- Herramientas para Desarrollar La CreaividadDocumento4 páginasHerramientas para Desarrollar La CreaividadGerardo DavidAinda não há avaliações
- Modelo Apertura Nuevo AhorrosDocumento7 páginasModelo Apertura Nuevo AhorrosSandra Hu-HiAinda não há avaliações
- Bitacora SemaforosDocumento6 páginasBitacora SemaforosAbel HernandezAinda não há avaliações
- AA2 Bases de Datos ALEJANDRO RIOSDocumento6 páginasAA2 Bases de Datos ALEJANDRO RIOSHaydem RiosAinda não há avaliações
- Plantilla para La Presentación Del Articulo CientificoDocumento11 páginasPlantilla para La Presentación Del Articulo CientificoJairo MojicaAinda não há avaliações
- Taller Operacionalizacion de VariablesDocumento11 páginasTaller Operacionalizacion de VariablesRuth OlivasAinda não há avaliações
- Libro Competencias SocioAfectivas PDFDocumento142 páginasLibro Competencias SocioAfectivas PDFMaria Victoria Mendoza PaterninaAinda não há avaliações
- Estadistica Aplicada A La Investigacion EducativaDocumento116 páginasEstadistica Aplicada A La Investigacion EducativaManuel Alejandro San MartinAinda não há avaliações
- Dirección Provincial de Educación Superior Instituto Superior de Formación Docente #21 "Dr. Ricardo Rojas" Merlo 499 - (1744) MorenoDocumento2 páginasDirección Provincial de Educación Superior Instituto Superior de Formación Docente #21 "Dr. Ricardo Rojas" Merlo 499 - (1744) MorenoJulius EvolaAinda não há avaliações
- Practica Teorica AutocadDocumento7 páginasPractica Teorica AutocadJaime CoronelAinda não há avaliações
- Algoritmo de Aproximaciones y ErroresDocumento3 páginasAlgoritmo de Aproximaciones y ErroresJosé luis Ortega ReyesAinda não há avaliações
- Museo Tecnologico 4, Unidad 4. Carlo SerratoDocumento3 páginasMuseo Tecnologico 4, Unidad 4. Carlo SerratoCarloo SerratooAinda não há avaliações
- Unidad 3 SQL Ejercicios PropuestosDocumento3 páginasUnidad 3 SQL Ejercicios PropuestoswandaAinda não há avaliações
- Interruptor Inversor RotativoDocumento20 páginasInterruptor Inversor RotativoSERVIN MICHELAinda não há avaliações
- Practica Base de Datos ErDocumento8 páginasPractica Base de Datos ErAlexander AcostaAinda não há avaliações
- Manual de Instalacion Street Cell Modernización A 5G - ASPs - Rev E + Anexo TSDocumento90 páginasManual de Instalacion Street Cell Modernización A 5G - ASPs - Rev E + Anexo TSvhernandez_811101Ainda não há avaliações
- Evoluciondelsistemacelularhacia UMTSDocumento11 páginasEvoluciondelsistemacelularhacia UMTSJUCARLCAinda não há avaliações
- Clase Final Diseño Factorial 22032016Documento51 páginasClase Final Diseño Factorial 22032016kelmin4_895078258Ainda não há avaliações
- Ejemplo de Sistema Basado en WebDocumento11 páginasEjemplo de Sistema Basado en WebSonyAtzinAinda não há avaliações
- X-Rite Fundamentos Basicos Color Es PDFDocumento2 páginasX-Rite Fundamentos Basicos Color Es PDFSel GarciaAinda não há avaliações
- TESISDocumento93 páginasTESISErick Osuna CanoAinda não há avaliações