Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Conference IEC 60079-14Documento79 páginasConference IEC 60079-14arturoncAinda não há avaliações
- Abdulla Samin MV 14449: Lab Report Froth FlotationDocumento4 páginasAbdulla Samin MV 14449: Lab Report Froth FlotationKevin100% (1)
- Siemens SONOLINE SL-1CDocumento37 páginasSiemens SONOLINE SL-1CCosty100% (2)
- 05 01Documento26 páginas05 01arturoncAinda não há avaliações
- IEC 60815-1, Aisladores HV, Definiciones PDFDocumento30 páginasIEC 60815-1, Aisladores HV, Definiciones PDFarturoncAinda não há avaliações
- IAL/CEL/LEL Series: Magnetic Circuit ProtectorsDocumento28 páginasIAL/CEL/LEL Series: Magnetic Circuit ProtectorsarturoncAinda não há avaliações
- 3bpepo3005m0107 (170837-004-7-007) - R0Documento1 página3bpepo3005m0107 (170837-004-7-007) - R0arturoncAinda não há avaliações
- 05 02Documento7 páginas05 02arturoncAinda não há avaliações
- 3BPEPO3005E0034 Rev0Documento7 páginas3BPEPO3005E0034 Rev0arturoncAinda não há avaliações
- Cliente:: Rev. NotasDocumento3 páginasCliente:: Rev. NotasarturoncAinda não há avaliações
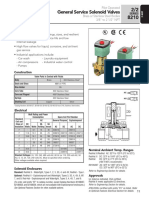
- 8210R9 PDFDocumento6 páginas8210R9 PDFarturoncAinda não há avaliações
- 8037 8308 8310MRR1Documento8 páginas8037 8308 8310MRR1arturoncAinda não há avaliações
- Introduction To Motor Circuit Design - NEC430 ABDocumento80 páginasIntroduction To Motor Circuit Design - NEC430 ABarturoncAinda não há avaliações
- Galaxy 3500: Performance Power Protection For Critical ApplicationsDocumento4 páginasGalaxy 3500: Performance Power Protection For Critical ApplicationsarturoncAinda não há avaliações
- 3710 ACM - Modicon ModbusDocumento36 páginas3710 ACM - Modicon ModbusarturoncAinda não há avaliações
- 5484, 5520, 5491 & 5543 Seismic Vibration TransmitterDocumento4 páginas5484, 5520, 5491 & 5543 Seismic Vibration TransmitterarturoncAinda não há avaliações
- 3.3.8 Kwik Bolt 3 Expansor AnchorDocumento31 páginas3.3.8 Kwik Bolt 3 Expansor AnchorarturoncAinda não há avaliações
- Three Dimensional Cutting Force Analysis in End MillingDocumento11 páginasThree Dimensional Cutting Force Analysis in End Millingamsubra8874Ainda não há avaliações
- Ultrasonic HC-SR04 PDFDocumento4 páginasUltrasonic HC-SR04 PDFDhany SSat0% (1)
- Art 1 Jeopardy Final ReviewDocumento53 páginasArt 1 Jeopardy Final Reviewapi-243273616Ainda não há avaliações
- The Influence of Frequency, Intensity, Volume and Mode of Strength Trainirg On Whole Muscle Cross-SectionaAl Rea in HumansDocumento40 páginasThe Influence of Frequency, Intensity, Volume and Mode of Strength Trainirg On Whole Muscle Cross-SectionaAl Rea in HumansromeroidasAinda não há avaliações
- Chemistry ProjectDocumento10 páginasChemistry Projectabhishek singhAinda não há avaliações
- Identification and Elimination of Hygro-Thermo - Mechanical Stress-Effects in A High-Precision MEMS Pressure Sensor - IEEE Xplore DocumentDocumento2 páginasIdentification and Elimination of Hygro-Thermo - Mechanical Stress-Effects in A High-Precision MEMS Pressure Sensor - IEEE Xplore DocumentEnrique OsorioAinda não há avaliações
- Mil HDBK 505 PDFDocumento9 páginasMil HDBK 505 PDFCORAL ALONSOAinda não há avaliações
- Scientific Instruments PDFDocumento3 páginasScientific Instruments PDFSiv SivaAinda não há avaliações
- MA5630 Term Project ReportDocumento22 páginasMA5630 Term Project ReportvamshiAinda não há avaliações
- E 1476 - 04 (2014)Documento12 páginasE 1476 - 04 (2014)iTuan Khai TruongAinda não há avaliações
- BICYCLE DESIGN AND FRAME BUILDING Student Handout Jan 2020 PDFDocumento9 páginasBICYCLE DESIGN AND FRAME BUILDING Student Handout Jan 2020 PDFRikkinAinda não há avaliações
- Applied Thermodynamics C211 PDFDocumento173 páginasApplied Thermodynamics C211 PDFSubham AcharyaAinda não há avaliações
- Calculus Cheat Sheet Derivatives ReducedDocumento2 páginasCalculus Cheat Sheet Derivatives ReducedsumitAinda não há avaliações
- Taylor Patterns For Discrete Arrays: Alfred T. VilleneuveDocumento5 páginasTaylor Patterns For Discrete Arrays: Alfred T. VilleneuveKorbi SchramlAinda não há avaliações
- Pressure SlidesDocumento43 páginasPressure SlidesBjorn Low100% (1)
- ABB IRB 2400 SpecificatiiDocumento2 páginasABB IRB 2400 Specificatiialin.butunoi865Ainda não há avaliações
- Exam Chapter Wave and Vibration (A)Documento2 páginasExam Chapter Wave and Vibration (A)Senny Ummu AlMuharrom100% (1)
- 0580 s12 QP 22Documento12 páginas0580 s12 QP 22Aryan RajputAinda não há avaliações
- (PAPER) Burland J.B. (2004) Interaction Between Structural and Geotechnical Engineers - JSD - Hong - Kong01 PDFDocumento29 páginas(PAPER) Burland J.B. (2004) Interaction Between Structural and Geotechnical Engineers - JSD - Hong - Kong01 PDFO SAinda não há avaliações
- Cylinder Pressure Closed Loop ControlDocumento11 páginasCylinder Pressure Closed Loop ControlkhalihneAinda não há avaliações
- Jhydro-environRes 5 313Documento28 páginasJhydro-environRes 5 313Gretty Campos AcuñaAinda não há avaliações
- RPT Physics F6 Second Term 2019Documento8 páginasRPT Physics F6 Second Term 2019Norhazli IbrahimAinda não há avaliações
- Astm E59Documento20 páginasAstm E59M Zeeshan HaiderAinda não há avaliações
- Finite Difference - WikipediaDocumento9 páginasFinite Difference - WikipediaJelena PapovicAinda não há avaliações
- Interzone 954 Antifungus ReportDocumento10 páginasInterzone 954 Antifungus Reportsteffy182100% (1)
- Lowrie SolutionDocumento19 páginasLowrie SolutionVijay Yadav100% (1)
- Digital To Analog Converter (DAC)Documento32 páginasDigital To Analog Converter (DAC)Rajesh PaudyalAinda não há avaliações
- Tolerance Accumulation and Analysis (GD&T)Documento80 páginasTolerance Accumulation and Analysis (GD&T)Kishor kumar Bhatia50% (4)