Você também pode gostar
- Volume 1.2.2 Form of Tender-Alternative DesignDocumento34 páginasVolume 1.2.2 Form of Tender-Alternative DesignJuan Carlos GaleanoAinda não há avaliações
- Volume 1.2.2 APPENDIX D FORM OF TENDER SECURITY Alternative DesignDocumento1 páginaVolume 1.2.2 APPENDIX D FORM OF TENDER SECURITY Alternative DesignJuan Carlos GaleanoAinda não há avaliações
- Volume 1.1 Instructions To TenderersDocumento24 páginasVolume 1.1 Instructions To TenderersJuan Carlos GaleanoAinda não há avaliações
- Volume 1.2.1 APPENDIX D FORM OF TENDER SECURITY Basic DesignDocumento1 páginaVolume 1.2.1 APPENDIX D FORM OF TENDER SECURITY Basic DesignJuan Carlos GaleanoAinda não há avaliações
- Seismic Load AnalysisDocumento99 páginasSeismic Load AnalysisMANDARAW100% (1)
- Type Floating Breakwaters 251251Documento8 páginasType Floating Breakwaters 251251Juan Carlos GaleanoAinda não há avaliações
- Floating Breakwaters 2571-11139-1-PBDocumento40 páginasFloating Breakwaters 2571-11139-1-PBJuan Carlos GaleanoAinda não há avaliações
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Ecotopia Remixed II-FormattedDocumento54 páginasEcotopia Remixed II-FormattedthisisdarrenAinda não há avaliações
- Meet The Profesor 2021Documento398 páginasMeet The Profesor 2021Raúl AssadAinda não há avaliações
- Book BindingDocumento14 páginasBook Bindingpesticu100% (2)
- Kuiz1 210114Documento12 páginasKuiz1 210114Vincent HoAinda não há avaliações
- Germania Agenturinfo enDocumento4 páginasGermania Agenturinfo enДушан СтепановићAinda não há avaliações
- Tsel Manual ThermoselDocumento25 páginasTsel Manual ThermoselPedro AlvelaisAinda não há avaliações
- Multiple Choice Enzymes Plant and Animal NutritionDocumento44 páginasMultiple Choice Enzymes Plant and Animal Nutritionliufanjing07Ainda não há avaliações
- Firestone & Scholl - Cognition Does Not Affect Perception, Evaluating Evidence For Top-Down EffectsDocumento77 páginasFirestone & Scholl - Cognition Does Not Affect Perception, Evaluating Evidence For Top-Down EffectsRed JohnAinda não há avaliações
- SAT Biochar Ethylene Poster 10 - 10b PDFDocumento1 páginaSAT Biochar Ethylene Poster 10 - 10b PDFsherifalharamAinda não há avaliações
- 7 +Royal+Court+Affairs,+Sultanate+of+OmanDocumento12 páginas7 +Royal+Court+Affairs,+Sultanate+of+OmanElencheliyan PandeeyanAinda não há avaliações
- Chapter 10 - The Mature ErythrocyteDocumento55 páginasChapter 10 - The Mature ErythrocyteSultan AlexandruAinda não há avaliações
- AR BuildingDocumento819 páginasAR BuildingShithin KrishnanAinda não há avaliações
- Procter and Gamble-1Documento5 páginasProcter and Gamble-1Abegiel MendozaAinda não há avaliações
- 4 5803133100506483687Documento245 páginas4 5803133100506483687Malik HamidAinda não há avaliações
- All Pop SongsDocumento53 páginasAll Pop SongsMadeleneQuiogueAinda não há avaliações
- (G. Lakshmi Narasaiah) Finite Element Analysis PDFDocumento349 páginas(G. Lakshmi Narasaiah) Finite Element Analysis PDFmoljaime1326Ainda não há avaliações
- 04 SAMSS 005 Check ValvesDocumento9 páginas04 SAMSS 005 Check ValvesShino UlahannanAinda não há avaliações
- S590 Machine SpecsDocumento6 páginasS590 Machine SpecsdilanAinda não há avaliações
- Ii 2015 1Documento266 páginasIi 2015 1tuni santeAinda não há avaliações
- Adaptive Cruise ControlDocumento5 páginasAdaptive Cruise ControlIJIRSTAinda não há avaliações
- BTK Implant Guide SurgeryDocumento48 páginasBTK Implant Guide SurgeryMaria VolvinaAinda não há avaliações
- Yadea User Manual For e Scooter 1546004910Documento44 páginasYadea User Manual For e Scooter 1546004910Danthe ThenadAinda não há avaliações
- Manual 35S EnglishDocumento41 páginasManual 35S EnglishgugiAinda não há avaliações
- Math 202 Syllabus-Spring18 PDFDocumento2 páginasMath 202 Syllabus-Spring18 PDFvonacoc49Ainda não há avaliações
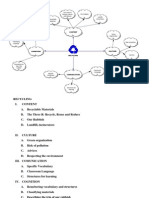
- Recycling Mind MapDocumento2 páginasRecycling Mind Mapmsole124100% (1)
- Serial Analysis of Gene Expression (SAGE)Documento34 páginasSerial Analysis of Gene Expression (SAGE)Rohit PhalakAinda não há avaliações
- Abdominal Examination OSCE GuideDocumento30 páginasAbdominal Examination OSCE Guideزياد سعيدAinda não há avaliações
- Earth Science (Metamorphic Rocks)Documento8 páginasEarth Science (Metamorphic Rocks)MA. ALEXIS LAURENAinda não há avaliações
- Kwasaki ZX10R 16Documento101 páginasKwasaki ZX10R 16OliverAinda não há avaliações
- Zincanode 304 pc142Documento3 páginasZincanode 304 pc142kushar_geoAinda não há avaliações