Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Shacman ManualDocumento318 páginasShacman ManualNay Soe100% (9)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Electric Motor and Its ApplicationsDocumento336 páginasThe Electric Motor and Its ApplicationsRommel100% (1)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- National Shipbuilding Research Documentation CenterDocumento82 páginasNational Shipbuilding Research Documentation CenterdichauvinAinda não há avaliações
- 1993 Chevrolet Corvette SpecificationsDocumento209 páginas1993 Chevrolet Corvette Specificationsedosr100% (2)
- Manual Steel Connections - ENUDocumento99 páginasManual Steel Connections - ENUHazim AffendiAinda não há avaliações
- Matlab, Simulink - Using Simulink and Stateflow in Automotive ApplicationsDocumento92 páginasMatlab, Simulink - Using Simulink and Stateflow in Automotive ApplicationsAvinash Nandakumar100% (1)
- 24M - Vol II.Documento651 páginas24M - Vol II.Lewis Olivo100% (1)
- Vehicle Network Toolbox - User GuideDocumento494 páginasVehicle Network Toolbox - User Guideਰਾਜਬੀਰ100% (2)
- Dse7110 Mkii Dse7120 Mkii Data SheetDocumento2 páginasDse7110 Mkii Dse7120 Mkii Data Sheetmnvijaybabu100% (1)
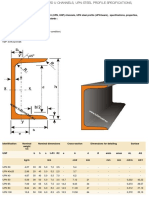
- UPN (UNP) European Standard U Channels, UPN Steel Profile Specifications, DimenDocumento2 páginasUPN (UNP) European Standard U Channels, UPN Steel Profile Specifications, DimenAdnan Atif100% (1)
- Design and Planning Long Mock Up - July 11 14-Ar JhunDocumento8 páginasDesign and Planning Long Mock Up - July 11 14-Ar JhunAr John Bernard AbadAinda não há avaliações
- 3.10 Power EvacuationDocumento63 páginas3.10 Power EvacuationIfnu SetyadiAinda não há avaliações
- QTMS User Guide V 3.0Documento218 páginasQTMS User Guide V 3.0laime_floresAinda não há avaliações
- Comprehensive Model-Based Engineering For Systems of Systems 2016Documento4 páginasComprehensive Model-Based Engineering For Systems of Systems 2016Heng ZhangAinda não há avaliações
- Composite Materials Mr.S.srinivasanDocumento35 páginasComposite Materials Mr.S.srinivasanHemant_Agarwal_5337Ainda não há avaliações
- SSC Selection Posts Phase VI 2018 PDFDocumento45 páginasSSC Selection Posts Phase VI 2018 PDFBP0% (1)
- Eurobrake 2019Documento16 páginasEurobrake 2019ਰਾਜਬੀਰAinda não há avaliações
- Exhaust Design by University of Maine FSAEDocumento7 páginasExhaust Design by University of Maine FSAEMichael Matthews0% (1)
- MG995 Tower ProDocumento2 páginasMG995 Tower ProLuthfyatma HardyAinda não há avaliações
- PID Control Design Made Easy: News&NotesDocumento4 páginasPID Control Design Made Easy: News&NotesPrem Kumar NepalAinda não há avaliações
- Region Post Code Post Name Organisation Correction/additionDocumento1 páginaRegion Post Code Post Name Organisation Correction/additionLucky KapoorAinda não há avaliações
- Document A IDocumento2 páginasDocument A IਰਾਜਬੀਰAinda não há avaliações
- An Effective Document Image Deblurring AlgorithmDocumento8 páginasAn Effective Document Image Deblurring AlgorithmਰਾਜਬੀਰAinda não há avaliações
- MG995 Tower ProDocumento2 páginasMG995 Tower ProLuthfyatma HardyAinda não há avaliações
- Vdynblks UgDocumento100 páginasVdynblks UgਰਾਜਬੀਰAinda não há avaliações
- Hybrid Solar Lighting SystemDocumento7 páginasHybrid Solar Lighting Systemਰਾਜਬੀਰ100% (1)
- Guidelies of TeacherDocumento2 páginasGuidelies of Teacherchennai11Ainda não há avaliações
- Stochastic Stability For A Model Representing The Intake Manifold Pressure of An Automotive EngineDocumento11 páginasStochastic Stability For A Model Representing The Intake Manifold Pressure of An Automotive EngineਰਾਜਬੀਰAinda não há avaliações
- Aerotbx Ug PDFDocumento542 páginasAerotbx Ug PDFਰਾਜਬੀਰAinda não há avaliações
- Stochastic Stability For A Model Representing The Intake Manifold Pressure of An Automotive EngineDocumento11 páginasStochastic Stability For A Model Representing The Intake Manifold Pressure of An Automotive EngineਰਾਜਬੀਰAinda não há avaliações
- Face Detection Using MATLAB and RPiDocumento7 páginasFace Detection Using MATLAB and RPiKhoaDoanAinda não há avaliações
- Modeling and Simulation of Temperature Control System of Coating Plant Air ConditionerDocumento6 páginasModeling and Simulation of Temperature Control System of Coating Plant Air ConditionerਰਾਜਬੀਰAinda não há avaliações
- ME CHENG 458 Automotive Engineering - A Systems-Based Course On The Functional Performance, Efficiency and Design of Motor Vehicles. ObjectiveDocumento2 páginasME CHENG 458 Automotive Engineering - A Systems-Based Course On The Functional Performance, Efficiency and Design of Motor Vehicles. ObjectiveAkhil GuptaAinda não há avaliações
- TiresDocumento5 páginasTiresstathiss11Ainda não há avaliações
- The Damper Levels Influence On Vehicle Roll, Pitch, Bounce and Cornering Behaviour of Passenger Vehicles PDFDocumento78 páginasThe Damper Levels Influence On Vehicle Roll, Pitch, Bounce and Cornering Behaviour of Passenger Vehicles PDFDebra JacksonAinda não há avaliações
- TireComparison PDFDocumento4 páginasTireComparison PDFPrakhar AggarwalAinda não há avaliações
- Simscape Gs 2017Documento44 páginasSimscape Gs 2017ਰਾਜਬੀਰAinda não há avaliações
- Resume ArifinDocumento9 páginasResume Arifinapi-27411749100% (1)
- Final Spec BookDocumento1 páginaFinal Spec BookWAHAB HUSSAINAinda não há avaliações
- Eaton CLEARGAF Filter Bags TechnicalDataSheet US LowRes PDFDocumento2 páginasEaton CLEARGAF Filter Bags TechnicalDataSheet US LowRes PDFNAHASALI11Ainda não há avaliações
- CB Concert Katalog en ScreenDocumento53 páginasCB Concert Katalog en ScreenPeter DavidsonAinda não há avaliações
- 1050 Pump Data SheetDocumento4 páginas1050 Pump Data SheetRery Dwi SAinda não há avaliações
- Z Wave Vision Wireless Siren Battery Powered Gen5 ManualDocumento3 páginasZ Wave Vision Wireless Siren Battery Powered Gen5 ManualsfdsfdsAinda não há avaliações
- Hidroten CatalogoDocumento36 páginasHidroten CatalogoaghmfotoAinda não há avaliações
- Certificate in Construction Project Management 280917 LPDocumento6 páginasCertificate in Construction Project Management 280917 LPjmarkunongo_69397286Ainda não há avaliações
- Godrej Washing MachineDocumento17 páginasGodrej Washing MachineDevendra GuptaAinda não há avaliações
- SOAL KELAS 12 KTSP PrintDocumento11 páginasSOAL KELAS 12 KTSP Printlismiasih166Ainda não há avaliações
- Dremel Moto ToolDocumento9 páginasDremel Moto TooljukortaAinda não há avaliações
- Valve Solutions For Pipelines PDFDocumento8 páginasValve Solutions For Pipelines PDFCristhian Niño MartinezAinda não há avaliações
- Elevation Section: 20 MM Cement Mortar 230 MM THK BK Wall 25 MM THK External PlasterDocumento1 páginaElevation Section: 20 MM Cement Mortar 230 MM THK BK Wall 25 MM THK External PlastersriAinda não há avaliações
- Trimdek Optima: LysaghtDocumento8 páginasTrimdek Optima: Lysaghtariezz kurniawanAinda não há avaliações
- GRE Pipe Testing MethodDocumento3 páginasGRE Pipe Testing MethodVanaa MohanAinda não há avaliações
- TechnologiesDocumento27 páginasTechnologiesJulya JulyAinda não há avaliações
- X-Ray Equipment Maintenance and Repairs Workbook: For Radiographers & Radiological TechnologistsDocumento6 páginasX-Ray Equipment Maintenance and Repairs Workbook: For Radiographers & Radiological TechnologistsAaronMaroonFiveAinda não há avaliações
- Auto Indexing Gear Cutting Attachment For Pneumatic Shaping MachineDocumento24 páginasAuto Indexing Gear Cutting Attachment For Pneumatic Shaping MachineDinesh Kumar100% (1)