Você também pode gostar
- Power Defense Trip Unit Manual PDFDocumento58 páginasPower Defense Trip Unit Manual PDFEl RoninAinda não há avaliações
- Ups DSP ManualsDocumento46 páginasUps DSP ManualsPaulo GonçalvesAinda não há avaliações
- 90 001 enDocumento2.410 páginas90 001 enGabriel CotignolaAinda não há avaliações
- EVS93xx - 9300 Servo 0.37-11kW - v3-0 - ENDocumento46 páginasEVS93xx - 9300 Servo 0.37-11kW - v3-0 - ENjairo Ivan Cobeña MaciasAinda não há avaliações
- ABB 610 ManualDocumento52 páginasABB 610 ManualwintechAinda não há avaliações
- Digital Electronic Thermometer: IndexDocumento8 páginasDigital Electronic Thermometer: IndexMohamedAinda não há avaliações
- ALFOplus80HD (MN.00318E)Documento120 páginasALFOplus80HD (MN.00318E)Al LaAinda não há avaliações
- EVS93xx - 9300 Servo 15-30kW - v3-0 - ENDocumento46 páginasEVS93xx - 9300 Servo 15-30kW - v3-0 - ENDiego Alejandro Gallardo IbarraAinda não há avaliações
- 3 Phase Ac Induction Motor Control With PFCDocumento50 páginas3 Phase Ac Induction Motor Control With PFChieuhuech1Ainda não há avaliações
- Machine Terminal REM 54 - : Technical Reference Manual, GeneralDocumento110 páginasMachine Terminal REM 54 - : Technical Reference Manual, GeneralÍcaro .O.V.Ainda não há avaliações
- FSCUT2000C Laser Cutting Control System User ManualV3.1Documento69 páginasFSCUT2000C Laser Cutting Control System User ManualV3.1Waldemar Merchel100% (1)
- DS Lan88730 60001256aDocumento88 páginasDS Lan88730 60001256aHassanOsamaAinda não há avaliações
- Ba77049e01 IQ SensorNet System 2020 XT MC3 WTWDocumento198 páginasBa77049e01 IQ SensorNet System 2020 XT MC3 WTWMihai DiaconuAinda não há avaliações
- Stcomet: Smart Meter and Powerline Communication System-On-ChipDocumento67 páginasStcomet: Smart Meter and Powerline Communication System-On-Chipengamin_sAinda não há avaliações
- Flowmeter D184b059u02-04-05 - 2006Documento52 páginasFlowmeter D184b059u02-04-05 - 2006jebisiAinda não há avaliações
- xc2765x Ds v1.3 2008 11Documento119 páginasxc2765x Ds v1.3 2008 11sishya123456Ainda não há avaliações
- JUMO Quantrol LC100/LC200/LC300: Universal PID Controller SeriesDocumento40 páginasJUMO Quantrol LC100/LC200/LC300: Universal PID Controller SeriesmikeAinda não há avaliações
- PirometroDocumento80 páginasPirometroWalter ZalazarAinda não há avaliações
- NSX 100-630 User ManualDocumento152 páginasNSX 100-630 User Manualagra04100% (1)
- Ka01418den 0221-00Documento56 páginasKa01418den 0221-00Meng PamplonaAinda não há avaliações
- MA182-003 ETHOS UP User ManualDocumento81 páginasMA182-003 ETHOS UP User ManualAntWonxxx71% (7)
- Manual MAC600 GEDocumento165 páginasManual MAC600 GEanhhp8x100% (2)
- EZT EZT EZT EZT - 560 560 560 560: Technical ManualDocumento87 páginasEZT EZT EZT EZT - 560 560 560 560: Technical ManualKittiwat WongsuwanAinda não há avaliações
- Micro Motion Series 3000 MVD Transmitters and Controllers: Configuration and Use ManualDocumento348 páginasMicro Motion Series 3000 MVD Transmitters and Controllers: Configuration and Use Manualfoobar2016Ainda não há avaliações
- XC2785X PDFDocumento136 páginasXC2785X PDFRazaan2326Ainda não há avaliações
- Promag 200 Operation InstructionDocumento48 páginasPromag 200 Operation InstructionAmit Kumar OjhaAinda não há avaliações
- Lenze Series 9300 PDFDocumento43 páginasLenze Series 9300 PDFWilson Barco MoralesAinda não há avaliações
- Firmware Specification: Edition November 2018 EPOS4 Positioning Controllers Firmware Specification Maxon Motor ControlDocumento278 páginasFirmware Specification: Edition November 2018 EPOS4 Positioning Controllers Firmware Specification Maxon Motor ControlAndreita Ortiz CuadrosAinda não há avaliações
- So MachineDocumento108 páginasSo Machinedp3006Ainda não há avaliações
- Position Feedback For Motor Control Using Magnetic SensorDocumento17 páginasPosition Feedback For Motor Control Using Magnetic SensorPablo TapiaAinda não há avaliações
- Eps DC 406d9d69f5Documento73 páginasEps DC 406d9d69f5AlexanderSandovalMateoAinda não há avaliações
- Infineon ControllerDocumento134 páginasInfineon ControllerJesus gomez corvalanAinda não há avaliações
- 00f4lebk300 PDFDocumento108 páginas00f4lebk300 PDFDull RahimAinda não há avaliações
- Planar4 System ManualDocumento194 páginasPlanar4 System ManualMohamed OmarAinda não há avaliações
- REM610 Oper 752264 ENdDocumento64 páginasREM610 Oper 752264 ENdAlexandre MorenoAinda não há avaliações
- c4g - Control Unit UseDocumento610 páginasc4g - Control Unit Userodrigomachado507Ainda não há avaliações
- Sonosite PLUS c1.9Documento100 páginasSonosite PLUS c1.9Roberto FalconeAinda não há avaliações
- Inverter LenzDocumento32 páginasInverter LenzyounesAinda não há avaliações
- User Guide: Multi-Loop Temperature / Process ControllersDocumento4 páginasUser Guide: Multi-Loop Temperature / Process ControllersgodianmalangwaAinda não há avaliações
- ECON.A User Manual - Production Firmware 7.2Documento200 páginasECON.A User Manual - Production Firmware 7.2jasmin selimićAinda não há avaliações
- Mn00114e PDFDocumento178 páginasMn00114e PDFYulian CedeñoAinda não há avaliações
- LENCE 8400 PROTEC ManualDocumento198 páginasLENCE 8400 PROTEC ManualTomislav LoinaAinda não há avaliações
- Im01c25r05 01enDocumento55 páginasIm01c25r05 01enlamAinda não há avaliações
- ConMed Hyfrecator 2000 Service ManualDocumento72 páginasConMed Hyfrecator 2000 Service Manualbbaboom100% (2)
- Maintenance: Flexible Multiplexer FMX2R3.2 Umn:MmnDocumento26 páginasMaintenance: Flexible Multiplexer FMX2R3.2 Umn:Mmn123roman123Ainda não há avaliações
- Programming Manual ABBDocumento138 páginasProgramming Manual ABBManuel ChuquimarcaAinda não há avaliações
- 8 Channel Fixed Frequency Constant Current Control With Current Profile DetectionDocumento78 páginas8 Channel Fixed Frequency Constant Current Control With Current Profile DetectioncqlAinda não há avaliações
- LH WLT06Documento92 páginasLH WLT06NguyễnĐặngNhưHậuAinda não há avaliações
- IM01E22C02-02EN (Manual de Usuario)Documento243 páginasIM01E22C02-02EN (Manual de Usuario)David SanchezAinda não há avaliações
- Spectra-Physics Integra MP User ManualDocumento78 páginasSpectra-Physics Integra MP User Manualfuckthis12340% (1)
- 8 III-2018 enDocumento426 páginas8 III-2018 enHanif ArdyansyahAinda não há avaliações
- Ethicon Harmonic 300 Ultrasonic Surgery Generator - User ManualDocumento36 páginasEthicon Harmonic 300 Ultrasonic Surgery Generator - User Manualreinahr100% (1)
- Movitrac LT Operating InstructionsDocumento56 páginasMovitrac LT Operating InstructionsJoimir PerezAinda não há avaliações
- WB2500 User ManualDocumento84 páginasWB2500 User Manualaurel_c12-1Ainda não há avaliações
- Operating Instructions c4000 Micro c4000 Basic Plus c4000 Basic c4000 Eco Safety Light Curtain en Im0011933Documento72 páginasOperating Instructions c4000 Micro c4000 Basic Plus c4000 Basic c4000 Eco Safety Light Curtain en Im0011933Rod FloresAinda não há avaliações
- Interswitch: Service ManualDocumento38 páginasInterswitch: Service ManualFrancisco Rolando Novas OrtaAinda não há avaliações
- Practical Machinery Vibration Analysis and Predictive MaintenanceNo EverandPractical Machinery Vibration Analysis and Predictive MaintenanceNota: 4.5 de 5 estrelas4.5/5 (10)
- Emerging Actuator Technologies: A Micromechatronic ApproachNo EverandEmerging Actuator Technologies: A Micromechatronic ApproachAinda não há avaliações
- Practical Modern SCADA Protocols: DNP3, 60870.5 and Related SystemsNo EverandPractical Modern SCADA Protocols: DNP3, 60870.5 and Related SystemsNota: 5 de 5 estrelas5/5 (6)
- Canada Immigration GuideDocumento2 páginasCanada Immigration Guideacmilan4eva1899Ainda não há avaliações
- Student Support Policy DocumentDocumento2 páginasStudent Support Policy Documentacmilan4eva1899Ainda não há avaliações
- CPM Reading ListDocumento7 páginasCPM Reading Listacmilan4eva1899Ainda não há avaliações
- Safety Analysis For Electrical Power Steering (EPS)Documento7 páginasSafety Analysis For Electrical Power Steering (EPS)acmilan4eva1899Ainda não há avaliações
- Electrical Power Steering Design Guide TEXASDocumento18 páginasElectrical Power Steering Design Guide TEXASacmilan4eva1899100% (1)
- Advances in Steering MechanismsDocumento32 páginasAdvances in Steering Mechanismsacmilan4eva1899Ainda não há avaliações
- Steering Gears Steering Mechanisms: BY NIKHIL BAHL 2K7/ME/267 Raghav Saxena 2K7/Me/284Documento34 páginasSteering Gears Steering Mechanisms: BY NIKHIL BAHL 2K7/ME/267 Raghav Saxena 2K7/Me/284Anonymous LFgO4WbIDAinda não há avaliações
- FUNCSAFTASILDWPDocumento9 páginasFUNCSAFTASILDWPacmilan4eva1899Ainda não há avaliações
- IC Syllabus PDFDocumento20 páginasIC Syllabus PDFacmilan4eva1899Ainda não há avaliações
- IC Syllabus PDFDocumento20 páginasIC Syllabus PDFacmilan4eva1899Ainda não há avaliações
- CIM ProspectusDocumento24 páginasCIM Prospectusacmilan4eva1899Ainda não há avaliações
- IC Syllabus PDFDocumento20 páginasIC Syllabus PDFacmilan4eva1899Ainda não há avaliações
- MKT SyllabusDocumento25 páginasMKT Syllabusacmilan4eva1899Ainda não há avaliações
- Safety Critical EPS Testing EtcDocumento4 páginasSafety Critical EPS Testing Etcacmilan4eva1899Ainda não há avaliações
- Student Support Policy DocumentDocumento2 páginasStudent Support Policy Documentacmilan4eva1899Ainda não há avaliações
- Canada Immigration GuideDocumento2 páginasCanada Immigration Guideacmilan4eva1899Ainda não há avaliações
- Exam and Assessment GuidelinesDocumento6 páginasExam and Assessment Guidelinesacmilan4eva1899Ainda não há avaliações
- Guidance On EIA Screening - G Screening Full TextDocumento32 páginasGuidance On EIA Screening - G Screening Full Textacmilan4eva1899Ainda não há avaliações
- SecETopic12EIA Project MGTDocumento24 páginasSecETopic12EIA Project MGTacmilan4eva1899Ainda não há avaliações
- EIA and SEA Future DirectionsDocumento22 páginasEIA and SEA Future Directionsacmilan4eva1899Ainda não há avaliações
- Plagarism GuideDocumento4 páginasPlagarism GuideLesego NdalaAinda não há avaliações
- Sec e Topic 8 ReportingDocumento22 páginasSec e Topic 8 Reportingacmilan4eva1899Ainda não há avaliações
- SecETopic9EIA QualityDocumento35 páginasSecETopic9EIA Qualityacmilan4eva1899Ainda não há avaliações
- Sec e Topic 5 ScopingDocumento29 páginasSec e Topic 5 Scopingacmilan4eva1899Ainda não há avaliações
- SecETopic11Implementation and Follow UpDocumento36 páginasSecETopic11Implementation and Follow Upacmilan4eva1899100% (1)
- 2008 - B59E6 Exam April 08Documento3 páginas2008 - B59E6 Exam April 08acmilan4eva1899Ainda não há avaliações
- LFI - S7000 Incident During The Pemex Power Generation Platform ProjectDocumento27 páginasLFI - S7000 Incident During The Pemex Power Generation Platform Projectacmilan4eva1899Ainda não há avaliações
- Guidance On EIA: ScopingDocumento38 páginasGuidance On EIA: ScopingRakesh PatilAinda não há avaliações
- Sample Environmental Impact AssessmentDocumento2 páginasSample Environmental Impact Assessmentrudiskw456Ainda não há avaliações
- 7 W Dim-To-Warm Buck-Boost LED DriverDocumento61 páginas7 W Dim-To-Warm Buck-Boost LED Driverknighthood4allAinda não há avaliações
- ZTE PON Interface CardsDocumento1 páginaZTE PON Interface CardsAlexander PischulinAinda não há avaliações
- Standby & Restricted Earth FaultDocumento7 páginasStandby & Restricted Earth FaultanjnaAinda não há avaliações
- Objective:: To Observe The Output of The ALE Pin of 8051 MicrocontrollerDocumento1 páginaObjective:: To Observe The Output of The ALE Pin of 8051 MicrocontrollerAnb BajwaAinda não há avaliações
- Tcad Omni License: All Tools, One License, Flat FeeDocumento4 páginasTcad Omni License: All Tools, One License, Flat FeesaifuddinAinda não há avaliações
- Manual de Utilizare Sina Smart Pentru Jaluzele Verticale Orvibo W13W14Documento19 páginasManual de Utilizare Sina Smart Pentru Jaluzele Verticale Orvibo W13W14matryzamAinda não há avaliações
- Votano 100 User Manual EnuDocumento138 páginasVotano 100 User Manual Enufd27100% (2)
- PrimeTime PowerAnalysisPXDocumento168 páginasPrimeTime PowerAnalysisPXAgnathavasiAinda não há avaliações
- NTP7415Documento1 páginaNTP7415Triyono WibowoAinda não há avaliações
- Theremin SchematicsDocumento1 páginaTheremin SchematicsKkillurAinda não há avaliações
- Parallel AdderDocumento20 páginasParallel AddermdbelalrshdAinda não há avaliações
- Radio Propagation Models GuideDocumento42 páginasRadio Propagation Models GuideNoshin FaiyroozAinda não há avaliações
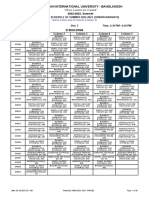
- Day 3 Slot 3 Mid Sm23 SummerDocumento32 páginasDay 3 Slot 3 Mid Sm23 SummerNayeem SarkarAinda não há avaliações
- Service Manual: N1B, /N1GDocumento17 páginasService Manual: N1B, /N1Gdanielradu27Ainda não há avaliações
- DCN IntegrationDocumento196 páginasDCN Integrationanilkr9soniAinda não há avaliações
- HT Italia Ht2051 Ht2052 Step Contact Meter Voltage Current Test Earth MeasurementDocumento1 páginaHT Italia Ht2051 Ht2052 Step Contact Meter Voltage Current Test Earth MeasurementAmarK90Ainda não há avaliações
- Exp 09Documento18 páginasExp 09khaled mahmudAinda não há avaliações
- Release 6 3gpp UmtsDocumento102 páginasRelease 6 3gpp Umtsoussama khelladiAinda não há avaliações
- HCD Ec77Documento104 páginasHCD Ec77tecnikerAinda não há avaliações
- Oec 9600imaging Workstation Illustrated Parts ManualDocumento95 páginasOec 9600imaging Workstation Illustrated Parts ManualJoe B BestialAinda não há avaliações
- LAB2Documento7 páginasLAB2Møhâmmåd ÑäfãíAinda não há avaliações
- KAlam LabManual EEE102 EWU Summer 2012Documento18 páginasKAlam LabManual EEE102 EWU Summer 2012Max TanAinda não há avaliações
- Release 6.0: Technical Solution ManualDocumento5 páginasRelease 6.0: Technical Solution ManualcosconorAinda não há avaliações
- Dynamic Power Sharing Between LTE Carriers (ERAN16.1 - 03)Documento52 páginasDynamic Power Sharing Between LTE Carriers (ERAN16.1 - 03)VVLAinda não há avaliações
- High Power Synchronous Buck Converter Delivers Up To 50A: Design Note 156 Dale EagarDocumento2 páginasHigh Power Synchronous Buck Converter Delivers Up To 50A: Design Note 156 Dale Eagarghimpe--Ainda não há avaliações
- ICT 1101 - PC HARDWARE AND COMPONENTSDocumento24 páginasICT 1101 - PC HARDWARE AND COMPONENTSyvan dollarsAinda não há avaliações
- EtaUltra Modbus MapDocumento63 páginasEtaUltra Modbus MapSowarav KumarAinda não há avaliações
- Sony TV Training Manual Chassi BA4Documento108 páginasSony TV Training Manual Chassi BA4Wasantha Munasingha100% (1)
- RapidFIRE SPI ModeDocumento5 páginasRapidFIRE SPI Modeaeroseb1Ainda não há avaliações
- Spesifikasi Acuson P500Documento2 páginasSpesifikasi Acuson P500KurniaBagusAinda não há avaliações