Você também pode gostar
- 31comparison of Modified Smith Predictor andDocumento5 páginas31comparison of Modified Smith Predictor andRevathi SoundiranAinda não há avaliações
- H Design of Controllers Ensuring The Regulation of Currents of The Decoupled Field Orientation Control Applied To A Pms MotorDocumento9 páginasH Design of Controllers Ensuring The Regulation of Currents of The Decoupled Field Orientation Control Applied To A Pms MotorSidahmed LarbaouiAinda não há avaliações
- Vapour Adiabatic Exponent For Flashing Flow in Nozzles: S.D. MorrisDocumento7 páginasVapour Adiabatic Exponent For Flashing Flow in Nozzles: S.D. MorrisRonald Tipula RamosAinda não há avaliações
- Discrete-Time Fractional-Order PID Controller Definition, Tuning, DigitalDocumento10 páginasDiscrete-Time Fractional-Order PID Controller Definition, Tuning, Digital9052359751Ainda não há avaliações
- PID Controller Tuning Methods: A Novel Teaching ApproachDocumento9 páginasPID Controller Tuning Methods: A Novel Teaching Approachsmprabu24317Ainda não há avaliações
- Robust MIMO PID Controllers Tuning Based On Complex Real Ratio of The Characteristic Matriz EigenvaluesDocumento9 páginasRobust MIMO PID Controllers Tuning Based On Complex Real Ratio of The Characteristic Matriz EigenvaluesEsther CozarAinda não há avaliações
- FOPDT Model CharacterizationDocumento6 páginasFOPDT Model CharacterizationHugo EGAinda não há avaliações
- Analysis of The Performance of Streamline Simulation: Célio MaschioDocumento10 páginasAnalysis of The Performance of Streamline Simulation: Célio MaschioAli DasmehAinda não há avaliações
- Empirical Models PDFDocumento11 páginasEmpirical Models PDFAhmed HummerAinda não há avaliações
- Synergetic and Sliding Mode Controls of A PMSM: A Comparative StudyDocumento5 páginasSynergetic and Sliding Mode Controls of A PMSM: A Comparative StudymellahAinda não há avaliações
- Petráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalDocumento12 páginasPetráš, I. 2009 Fractional-Order Feedback Control of A DC Motor Journal of ElectricalcharifAinda não há avaliações
- Sensors 14 23119Documento18 páginasSensors 14 23119Krishna KumarAinda não há avaliações
- PLAXIS Implementation of HYPOPLASTICITY: David Ma S In February 19, 2014Documento35 páginasPLAXIS Implementation of HYPOPLASTICITY: David Ma S In February 19, 2014Marco QuirozAinda não há avaliações
- Predictive Torque Control of Permanent Magnet Synchronous Motor Drive With Reduced Switching FrequencyDocumento6 páginasPredictive Torque Control of Permanent Magnet Synchronous Motor Drive With Reduced Switching FrequencyYerramsetty SreekanthAinda não há avaliações
- Stata Lab4 2023Documento36 páginasStata Lab4 2023Aadhav JayarajAinda não há avaliações
- CDC 2005 1583310Documento6 páginasCDC 2005 1583310SowrirajanAinda não há avaliações
- OpenSees-SNOPT Framework for Finite Element Based Structural OptimizationDocumento24 páginasOpenSees-SNOPT Framework for Finite Element Based Structural Optimizationgreenday3Ainda não há avaliações
- Electronics 08 00221Documento13 páginasElectronics 08 00221AMAN GOYALAinda não há avaliações
- PDPM: Time Domain Analysis of 1st and 2nd Order SystemsDocumento7 páginasPDPM: Time Domain Analysis of 1st and 2nd Order SystemsMANOJ KUMAR DASAinda não há avaliações
- Macar2001 28Documento8 páginasMacar2001 28Erick Renzo Hidalgo OrtegaAinda não há avaliações
- Controller Design Based On Transient Response CriteriaDocumento20 páginasController Design Based On Transient Response CriteriaGapuk MaboekAinda não há avaliações
- sphDocumento14 páginassphRafael S. MoraesAinda não há avaliações
- DC Motor Speed Control Using Pid Controller: June 2005Documento6 páginasDC Motor Speed Control Using Pid Controller: June 2005Juan Jose Borra GarciaAinda não há avaliações
- 10 1 1 623 275 PDFDocumento28 páginas10 1 1 623 275 PDFDamir MiletaAinda não há avaliações
- Mathematical Modeling of Power DC/DC: ConvertersDocumento6 páginasMathematical Modeling of Power DC/DC: ConvertersStudents Xerox ChidambaramAinda não há avaliações
- Internal Model Control: Part of A Set of Lecture Notes On Introduction To Robust Control by Ming T. Tham (2002)Documento9 páginasInternal Model Control: Part of A Set of Lecture Notes On Introduction To Robust Control by Ming T. Tham (2002)jimi7Ainda não há avaliações
- Data-Based Approach To Feedback-Feedforward Controller Design From Closed-Loop Plant DataDocumento6 páginasData-Based Approach To Feedback-Feedforward Controller Design From Closed-Loop Plant DataArif HidayatAinda não há avaliações
- Automatic Tuning of Pid Controller Using Fuzzy LogicDocumento8 páginasAutomatic Tuning of Pid Controller Using Fuzzy LogicKha BùiAinda não há avaliações
- Sliding Mode Control Based On Fractional Order Calculus For DC-DC ConvertersDocumento15 páginasSliding Mode Control Based On Fractional Order Calculus For DC-DC ConverterssathishAinda não há avaliações
- PID ControlDocumento40 páginasPID ControlSśēmǾǿ ŔämáďañAinda não há avaliações
- Ieee CSL2021Documento6 páginasIeee CSL2021Adriano Nogueira DrumondAinda não há avaliações
- Nonlinear Discrete-Time Integral Sliding Mode Control of An Induction Motor: Real-Time ImplementationDocumento10 páginasNonlinear Discrete-Time Integral Sliding Mode Control of An Induction Motor: Real-Time Implementationdamaya1701Ainda não há avaliações
- Characteristic Mesh Grid Method For Transient Analysis of Natural Gas Flow in Pipelines NetworksDocumento12 páginasCharacteristic Mesh Grid Method For Transient Analysis of Natural Gas Flow in Pipelines NetworksBakhytzhan AssilbekovAinda não há avaliações
- Introduction To Olecular Ynamics Simulations Using: M D LammpsDocumento86 páginasIntroduction To Olecular Ynamics Simulations Using: M D Lammpskroidman100% (2)
- PI Control of FOTDS-1Documento16 páginasPI Control of FOTDS-1Pushpesh Kr PandeyAinda não há avaliações
- State Space Models and The Kalman FilterDocumento49 páginasState Space Models and The Kalman FilterMohammadAinda não há avaliações
- CFD Analysis of Gas Ejector Performance using Isobutene RefrigerantDocumento6 páginasCFD Analysis of Gas Ejector Performance using Isobutene RefrigerantmyskyshepherdAinda não há avaliações
- Modelling Discrete Time SystemsDocumento6 páginasModelling Discrete Time SystemsSandeep KumarAinda não há avaliações
- Markets98 SMFM Appl PDFDocumento10 páginasMarkets98 SMFM Appl PDFLester IngberAinda não há avaliações
- HJM ModelsDocumento12 páginasHJM ModelsPrateek SabharwalAinda não há avaliações
- Homework 3Documento3 páginasHomework 3Parvesh kambojAinda não há avaliações
- Robust H Control of A Scanning Tunneling Microscope Under Parametric UncertaintiesDocumento6 páginasRobust H Control of A Scanning Tunneling Microscope Under Parametric UncertaintiesMishaalAinda não há avaliações
- Solving Burgers' Equation With Quantum ComputingDocumento13 páginasSolving Burgers' Equation With Quantum Computingsingh_mathitbhu5790Ainda não há avaliações
- For Simulation (Study The System Output For A Given Input)Documento28 páginasFor Simulation (Study The System Output For A Given Input)productforeverAinda não há avaliações
- Notes 1Documento33 páginasNotes 1Mysterio MughalAinda não há avaliações
- Design and Implementation of A Self-Tuning Pid ControllerDocumento6 páginasDesign and Implementation of A Self-Tuning Pid ControllerShreyas MaitreyaAinda não há avaliações
- Controller Tuning: CHME 624 Advance Process Dynamic Modelling & ControlDocumento15 páginasController Tuning: CHME 624 Advance Process Dynamic Modelling & Controlali aljifriAinda não há avaliações
- Two-Degree-of-Freedom PID Controllers StructuresDocumento14 páginasTwo-Degree-of-Freedom PID Controllers Structuresbhautik daxiniAinda não há avaliações
- Survey of Control Systems (MEM 800) PresentedDocumento26 páginasSurvey of Control Systems (MEM 800) PresentedvananhbarcaAinda não há avaliações
- Figure 1: Air-Fuel Path (1) : Is TheDocumento6 páginasFigure 1: Air-Fuel Path (1) : Is Thesopnashree jenaAinda não há avaliações
- Dissetacao MestradoDocumento19 páginasDissetacao MestradoFernando LopesAinda não há avaliações
- ELEC30x0 Lab11 Characterization SlidesDocumento22 páginasELEC30x0 Lab11 Characterization Slideswww.autovatorAinda não há avaliações
- Kohn Worgotter98Documento13 páginasKohn Worgotter98cuitao42Ainda não há avaliações
- Model Predictive Control: Prof. Shi-Shang Jang National Tsing-Hua University Chemical Engineering DepartmentDocumento44 páginasModel Predictive Control: Prof. Shi-Shang Jang National Tsing-Hua University Chemical Engineering DepartmentAayush PatidarAinda não há avaliações
- hw6 SolDocumento11 páginashw6 SolAbdallah RedaAinda não há avaliações
- Reduced Order ControllerDocumento6 páginasReduced Order Controllerabyss2000Ainda não há avaliações
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Ainda não há avaliações
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)Ainda não há avaliações
- 1 s2.0 S1474667015354082 MainDocumento6 páginas1 s2.0 S1474667015354082 MainAqmal FAAinda não há avaliações
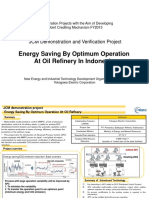
- Energy Saving by Optimum Operation at Oil Refinery in IndonesiaDocumento2 páginasEnergy Saving by Optimum Operation at Oil Refinery in IndonesiaAqmal FAAinda não há avaliações
- Understanding Gartners CycleDocumento33 páginasUnderstanding Gartners CycleAqmal FAAinda não há avaliações
- Hasil TOEFL Akbar Undip 2017Documento14 páginasHasil TOEFL Akbar Undip 2017Aqmal FAAinda não há avaliações
- Boiler Firing Control Design Using Model Predictive TechniquesDocumento6 páginasBoiler Firing Control Design Using Model Predictive TechniquesAqmal FAAinda não há avaliações
- Pengenalan ScadaDocumento34 páginasPengenalan ScadaswestyandiniAinda não há avaliações
- ILL Conditioned SystemsDocumento5 páginasILL Conditioned SystemsD.n.PrasadAinda não há avaliações
- Paper DCSDocumento10 páginasPaper DCSAqmal FAAinda não há avaliações
- Multi Layer APCDocumento15 páginasMulti Layer APCAqmal FAAinda não há avaliações
- Chapter - 19 (3-7-05) PDFDocumento40 páginasChapter - 19 (3-7-05) PDFAqmal FAAinda não há avaliações
- Yield Control of A Pilot Scale Vacuum Gas Oil Hydrocracker Using A Soft-Sensing ApproachDocumento9 páginasYield Control of A Pilot Scale Vacuum Gas Oil Hydrocracker Using A Soft-Sensing ApproachAqmal FAAinda não há avaliações
- Simatic Pcs 7: Enhance Operational Efficiency With Advanced Process Control (APC)Documento8 páginasSimatic Pcs 7: Enhance Operational Efficiency With Advanced Process Control (APC)Aqmal FAAinda não há avaliações
- Real Time Optimization EdDocumento8 páginasReal Time Optimization EdAqmal FAAinda não há avaliações
- The Future of PID ControlDocumento14 páginasThe Future of PID ControlAqmal FAAinda não há avaliações
- Datasheet SimSci FCCDocumento4 páginasDatasheet SimSci FCCAqmal FAAinda não há avaliações
- DMC For BoilerDocumento7 páginasDMC For BoilerAqmal FAAinda não há avaliações
- Lec 31 FuzzysystemDocumento11 páginasLec 31 FuzzysystemAqmal FAAinda não há avaliações
- Energy SavingDocumento2 páginasEnergy SavingAqmal FAAinda não há avaliações
- Model Predictive Control of A Crude Distillation Unit PDFDocumento6 páginasModel Predictive Control of A Crude Distillation Unit PDFHussaini Hamisu100% (1)
- Perancangan Sistem Kontrol Proses Kolom Distilasi Minyak Mentah Berbasis AnfisDocumento15 páginasPerancangan Sistem Kontrol Proses Kolom Distilasi Minyak Mentah Berbasis AnfisAqmal FAAinda não há avaliações
- aspenONE APC Family Brochure PDFDocumento8 páginasaspenONE APC Family Brochure PDFAqmal FAAinda não há avaliações
- Elk 19 5 12 1007 584 PDFDocumento9 páginasElk 19 5 12 1007 584 PDFAqmal FAAinda não há avaliações
- Perancangan Sistem Kontrol Proses Kolom Distilasi Minyak Mentah Berbasis AnfisDocumento15 páginasPerancangan Sistem Kontrol Proses Kolom Distilasi Minyak Mentah Berbasis AnfisAqmal FAAinda não há avaliações
- Instrumentation - Dcs Engineer - DesignDocumento2 páginasInstrumentation - Dcs Engineer - DesignuyaiekanemAinda não há avaliações
- SIS How To PrimerDocumento32 páginasSIS How To PrimerGCAinda não há avaliações
- Characterization and Modeling of Crude Oil Desalting Plant by A Statistically Design ApproachDocumento8 páginasCharacterization and Modeling of Crude Oil Desalting Plant by A Statistically Design ApproachangelkindlyAinda não há avaliações
- MathematicsDocumento3 páginasMathematicsChinnamanur Rajamani MuthukrishnanAinda não há avaliações
- Algorithms RosenDocumento60 páginasAlgorithms RosenAsha Rose ThomasAinda não há avaliações
- Multiplying and Dividing Rational ExpressionsDocumento24 páginasMultiplying and Dividing Rational ExpressionsClark Keith A. GatdulaAinda não há avaliações
- Applied Solid MechanicsDocumento469 páginasApplied Solid MechanicsMd AmirulAinda não há avaliações
- MTH401 Final Term Past Paper 1Documento12 páginasMTH401 Final Term Past Paper 1Moiez PlaysAinda não há avaliações
- June 2017 QP - Paper 1F Edexcel Maths (A) IGCSEDocumento24 páginasJune 2017 QP - Paper 1F Edexcel Maths (A) IGCSEpanya prachachit0% (1)
- DLL Math 1 q3 Week 3 d5 Lc42cDocumento3 páginasDLL Math 1 q3 Week 3 d5 Lc42cMaica67% (3)
- Lesson 15 Graphing Exponential FunctionsDocumento5 páginasLesson 15 Graphing Exponential FunctionsPam G.Ainda não há avaliações
- Direction. Encircle The Letter of Your Best Answer.: Name: - DateDocumento3 páginasDirection. Encircle The Letter of Your Best Answer.: Name: - DateИан ЦомаиасAinda não há avaliações
- Advanced Mechanics of Solids 925cDocumento425 páginasAdvanced Mechanics of Solids 925cHungryHowls ASMR100% (3)
- Using Parametric Equations Exercise PDFDocumento1 páginaUsing Parametric Equations Exercise PDFwolfretonmaths0% (2)
- Efficient DFT CalculationDocumento9 páginasEfficient DFT Calculationapi-3695801100% (1)
- Exterior Angles-Answer KeyDocumento1 páginaExterior Angles-Answer KeyWalaa MagdyAinda não há avaliações
- One Function of Two Random VariablesDocumento33 páginasOne Function of Two Random Variablesever fuentesAinda não há avaliações
- Identification of Individual Types of Harmonic Loads in An Electric Power System BusDocumento4 páginasIdentification of Individual Types of Harmonic Loads in An Electric Power System BusTarak BenslimaneAinda não há avaliações
- ISC 2016 Computer Science Theory: Recursive Function Dry RunDocumento27 páginasISC 2016 Computer Science Theory: Recursive Function Dry RunAdit Sarkar0% (1)
- Greater Than and Less Than: Subject/Topic: 1st Grade Mathematics: Number & Operations in Base Ten RationaleDocumento6 páginasGreater Than and Less Than: Subject/Topic: 1st Grade Mathematics: Number & Operations in Base Ten Rationaleapi-279517519Ainda não há avaliações
- Laplace Transform C4 - StudentsDocumento21 páginasLaplace Transform C4 - StudentsJing ZeAinda não há avaliações
- CCSIT Time TableDocumento43 páginasCCSIT Time TableAiman KhanAinda não há avaliações
- Chapter 20 Sol. Bedford DinamicaDocumento88 páginasChapter 20 Sol. Bedford DinamicaOrlando Chirinos50% (2)
- Orthogonal P-Wavelets On R: + Yu.A. FarkovDocumento23 páginasOrthogonal P-Wavelets On R: + Yu.A. FarkovukoszapavlinjeAinda não há avaliações
- Josef Haunschmied: Operations Research 1 Für WirtschaftsinformatikerDocumento70 páginasJosef Haunschmied: Operations Research 1 Für WirtschaftsinformatikerHundeejireenyaAinda não há avaliações
- Emmet - Whitehead's Philosophy of OrganismDocumento317 páginasEmmet - Whitehead's Philosophy of Organismziddasy100% (1)
- IB Math Exploration GuideDocumento7 páginasIB Math Exploration GuideAkshitha KodappadathAinda não há avaliações
- Probability random variables statistics assignmentDocumento6 páginasProbability random variables statistics assignmentMuhammad KhalidAinda não há avaliações
- Long Bondpaper Graphing Paper: SampleDocumento2 páginasLong Bondpaper Graphing Paper: SampleYsaka St. Tocinto0% (1)
- Vedic Algorithms To Develop Green Chips For FutureDocumento3 páginasVedic Algorithms To Develop Green Chips For FutureeditorijsaaAinda não há avaliações
- Interview QuestDocumento13 páginasInterview QuestSandeep GargAinda não há avaliações
- D1 - Review Excerise 2Documento46 páginasD1 - Review Excerise 2Ahmed NurulAinda não há avaliações
- Weekly Prototype Plan Week 1 General MathematicsDocumento9 páginasWeekly Prototype Plan Week 1 General MathematicsLily Anne Ramos MendozaAinda não há avaliações