Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Modulus of Subgrade Reaction PDFDocumento10 páginasModulus of Subgrade Reaction PDFMisgun Samuel100% (1)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Chinese Detailing StandardDocumento107 páginasChinese Detailing StandardMisgun Samuel100% (2)
- Analysis and Design of Four Storied RC Using Sap2000Documento41 páginasAnalysis and Design of Four Storied RC Using Sap2000Misgun Samuel100% (2)
- Analysis and Design of Four Storied RC B ExportDocumento44 páginasAnalysis and Design of Four Storied RC B ExportMisgun SamuelAinda não há avaliações
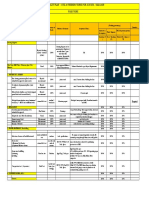
- Field Quality Plan - 2022 RoadDocumento9 páginasField Quality Plan - 2022 RoadMozhi Moni100% (1)
- UBC 97 - Vol3 The Uniform Building CodeDocumento475 páginasUBC 97 - Vol3 The Uniform Building CodeMisgun Samuel50% (2)
- PCA Concrete Floor Slab OpeningsDocumento4 páginasPCA Concrete Floor Slab OpeningsRavindra MRAinda não há avaliações
- Post-Tensioned Slabs Design SolutionsDocumento16 páginasPost-Tensioned Slabs Design SolutionsMedo Nasr100% (1)
- Concrete EC2Documento186 páginasConcrete EC2Ivan GradAinda não há avaliações
- 10 Benefits of Drinking Hot Water - How Can It Help Your Health - PDFDocumento15 páginas10 Benefits of Drinking Hot Water - How Can It Help Your Health - PDFMisgun SamuelAinda não há avaliações
- Jack WellDocumento23 páginasJack WellRamakanth Putty100% (1)
- Tyco - Window Sprinklers As An Alternative To Fire PDFDocumento19 páginasTyco - Window Sprinklers As An Alternative To Fire PDFingenierosunidosAinda não há avaliações
- SAP2000 Academic TrainingDocumento48 páginasSAP2000 Academic Trainingkg93% (15)
- Eurocodes: Background & Applications Structural Fire Design: Worked ExamplesDocumento256 páginasEurocodes: Background & Applications Structural Fire Design: Worked ExamplesSantanu GhoshAinda não há avaliações
- Fire and Smoke Fire - and - Smoke - Tight - Sliding - Doorstight Sliding Doors Mutli Purpose Doors 86038 enDocumento32 páginasFire and Smoke Fire - and - Smoke - Tight - Sliding - Doorstight Sliding Doors Mutli Purpose Doors 86038 enAna GainaAinda não há avaliações
- Iso 06944-1-2008Documento40 páginasIso 06944-1-2008Quốc Đạt100% (2)
- Force and Deformation Responses of TallDocumento14 páginasForce and Deformation Responses of TallMisgun SamuelAinda não há avaliações
- Csi Etabs Flat PlateDocumento3 páginasCsi Etabs Flat PlateMisgun SamuelAinda não há avaliações
- Pre StressDocumento502 páginasPre StressAkshay NaikAinda não há avaliações
- Reinforced Concrete Structures II-2016 - Chapter 2Documento29 páginasReinforced Concrete Structures II-2016 - Chapter 2Misgun SamuelAinda não há avaliações
- Linea de CedenciaDocumento175 páginasLinea de CedenciaKatherine Prado100% (1)
- (General Version) BIOS Update Instruction (BSU) v2.6 - AllDocumento23 páginas(General Version) BIOS Update Instruction (BSU) v2.6 - AllRush WilliamsAinda não há avaliações
- Bearings For Bridges: Dr. Shahzad Rahman NWFP University of Engg & Technology, PeshawarDocumento53 páginasBearings For Bridges: Dr. Shahzad Rahman NWFP University of Engg & Technology, PeshawarAbhimanyu SinghAinda não há avaliações
- SAP2000 Tutorial: Analyzing a Two-Dimensional Truss StructureDocumento17 páginasSAP2000 Tutorial: Analyzing a Two-Dimensional Truss StructureMisgun SamuelAinda não há avaliações
- To Base Plates of Hollow Sections Columns: Conference PaperDocumento9 páginasTo Base Plates of Hollow Sections Columns: Conference PaperMisgun SamuelAinda não há avaliações
- Approximate Analysis of Piled Raft PDFDocumento5 páginasApproximate Analysis of Piled Raft PDFMisgun SamuelAinda não há avaliações
- Kolon Ayağı Ve Ankraj Bulonu Hesabı 1Documento14 páginasKolon Ayağı Ve Ankraj Bulonu Hesabı 1magxstone100% (2)
- Calculation Deflection in Accordance To EC-2: 1.1 Design DataDocumento15 páginasCalculation Deflection in Accordance To EC-2: 1.1 Design DataMisgun SamuelAinda não há avaliações
- S5 - EC8-Lisbon - M FARDIS-1 PDFDocumento28 páginasS5 - EC8-Lisbon - M FARDIS-1 PDFMisgun SamuelAinda não há avaliações
- Approximate Analysis of Piled Raft PDFDocumento5 páginasApproximate Analysis of Piled Raft PDFMisgun SamuelAinda não há avaliações
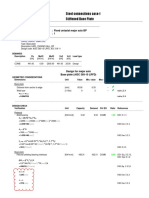
- Closed Section Column Base Loaded by Axial Force and Bending MomentDocumento20 páginasClosed Section Column Base Loaded by Axial Force and Bending MomentMisgun SamuelAinda não há avaliações
- SAP2000 Tutorial: Analyzing a Two-Dimensional Truss StructureDocumento17 páginasSAP2000 Tutorial: Analyzing a Two-Dimensional Truss StructureMisgun SamuelAinda não há avaliações
- 98 s39Documento9 páginas98 s39Misgun SamuelAinda não há avaliações
- Lecture 4 Slabs - Oct 12 - End PDFDocumento131 páginasLecture 4 Slabs - Oct 12 - End PDFMisgun SamuelAinda não há avaliações
- Electrical InstallationDocumento3 páginasElectrical InstallationAmpumuza AdrianAinda não há avaliações
- 3D Printing in Construction ChallengesDocumento7 páginas3D Printing in Construction Challengesابو النمرAinda não há avaliações
- 25.03 - Vitaulic RanuradoDocumento3 páginas25.03 - Vitaulic RanuradoABAD ALEXANDER MORENO ZÁRATEAinda não há avaliações
- Gree Central Air conditioners Installation GuideDocumento362 páginasGree Central Air conditioners Installation GuideGuilherme LopesAinda não há avaliações
- Bare Conductors PDFDocumento40 páginasBare Conductors PDFGerardo MorenoAinda não há avaliações
- Materials of Manav SadhnaDocumento2 páginasMaterials of Manav SadhnaIshita JainAinda não há avaliações
- Auracast 100 BFLDocumento2 páginasAuracast 100 BFLpeashAinda não há avaliações
- CI2400ENG Bondstrand 2400 Product DataDocumento6 páginasCI2400ENG Bondstrand 2400 Product DatachabibAinda não há avaliações
- Cast Steel Y-Strainers ANSI 150-600 LB: 0062 API 6D-0444Documento1 páginaCast Steel Y-Strainers ANSI 150-600 LB: 0062 API 6D-0444Camilo SanchezAinda não há avaliações
- FMDS0793NDocumento6 páginasFMDS0793NCHANDANAinda não há avaliações
- Spare PartDocumento3 páginasSpare PartFuadAinda não há avaliações
- PRICED (R) - FBC Finishing PackageDocumento1 páginaPRICED (R) - FBC Finishing PackagejatinAinda não há avaliações
- Thousand Tower & Sendai MTDocumento7 páginasThousand Tower & Sendai MTAnastasia YesicaAinda não há avaliações
- Install and Maintain Modular AHUDocumento35 páginasInstall and Maintain Modular AHUAngga HardiyantomoAinda não há avaliações
- Best practices for reducing HVAC infiltration and maintaining building pressurizationDocumento64 páginasBest practices for reducing HVAC infiltration and maintaining building pressurizationJUANAinda não há avaliações
- Tosaca-Manual Engelsk 01Documento9 páginasTosaca-Manual Engelsk 01jajakaAinda não há avaliações
- Plexo Catalogue 02 PDFDocumento20 páginasPlexo Catalogue 02 PDFAdinugroho SunardiAinda não há avaliações
- Design and Analysis of Heat ExchangerDocumento3 páginasDesign and Analysis of Heat Exchangertamilselvan416Ainda não há avaliações
- Steel Connections Case-I Stiffened Base Plate: ResultsDocumento4 páginasSteel Connections Case-I Stiffened Base Plate: Resultsfreddysalas12Ainda não há avaliações
- Baine Hospital Details Scope of Work 25082017Documento3 páginasBaine Hospital Details Scope of Work 25082017kumarjit kolayAinda não há avaliações
- Filtrair Filter Media VNF M1 Series ENDocumento2 páginasFiltrair Filter Media VNF M1 Series ENThái Hòa GiangAinda não há avaliações
- SSR 125-450 HOREPOWER Intellisys Units Inlet Panel Air Filters Installation/ Instruction Manual Parts List Replacement PartsDocumento14 páginasSSR 125-450 HOREPOWER Intellisys Units Inlet Panel Air Filters Installation/ Instruction Manual Parts List Replacement PartsGustavo HuertasAinda não há avaliações
- Appendix Chemical Engineering 34Documento154 páginasAppendix Chemical Engineering 34JAGATHA NAGESWARA RAOAinda não há avaliações
- Performance Materials: Polyurethane SystemsDocumento51 páginasPerformance Materials: Polyurethane SystemscaioltbgAinda não há avaliações
- CIVL 7132 Soil Mechanics HomeworkDocumento2 páginasCIVL 7132 Soil Mechanics HomeworkmrinmaiAinda não há avaliações