Você também pode gostar
- DERIVADASDocumento24 páginasDERIVADASJuanAinda não há avaliações
- Introducción Al PLCDocumento20 páginasIntroducción Al PLCwaltherAinda não há avaliações
- BobinasDocumento9 páginasBobinasRonnyAinda não há avaliações
- Aminoacidos Peptidos y ProteinasDocumento22 páginasAminoacidos Peptidos y ProteinasgekoAinda não há avaliações
- Propiedades de Los Materiales Industriales HonorioDocumento17 páginasPropiedades de Los Materiales Industriales Honoriodante cuno yauriAinda não há avaliações
- Ensayo Cortocircuito PDFDocumento10 páginasEnsayo Cortocircuito PDFJoseC.LeonAinda não há avaliações
- Clases Iluminacion Metodo Lumen PDFDocumento8 páginasClases Iluminacion Metodo Lumen PDFwilver borda cazorlaAinda não há avaliações
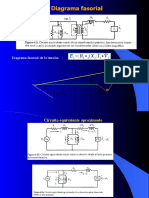
- Diagrama Fasorial de La TensiónDocumento11 páginasDiagrama Fasorial de La TensiónFelix Alexander VargasAinda não há avaliações
- Diagnóstico SituacionalDocumento5 páginasDiagnóstico SituacionalAndrea SantosAinda não há avaliações
- Circuitos Magnéticos PDFDocumento25 páginasCircuitos Magnéticos PDFKevin Sales FernandezAinda não há avaliações
- Informe 10 - Transformadores de Medida y EspecialesDocumento5 páginasInforme 10 - Transformadores de Medida y EspecialesDaniel RiveraAinda não há avaliações
- 9c. BobinasDocumento29 páginas9c. BobinasKarol Saenz SethAinda não há avaliações
- Ley de Ohm PresentacionDocumento22 páginasLey de Ohm Presentacionmandrake1233Ainda não há avaliações
- Analisis de TransformadoresDocumento5 páginasAnalisis de TransformadoresVictor Quevedo Maldonado100% (1)
- Informe Manejo de Arreglos PythonDocumento16 páginasInforme Manejo de Arreglos PythonDANNA VALENTINA CARDENAS CALDERONAinda não há avaliações
- Circuitos Magneticos 1 PDFDocumento24 páginasCircuitos Magneticos 1 PDFAnonymous GDvAIGn9Ainda não há avaliações
- Automatización de Una Banda Por PLC LOGO! Siemens Mediante ContadoresDocumento12 páginasAutomatización de Una Banda Por PLC LOGO! Siemens Mediante ContadoresVictor CamachoAinda não há avaliações
- Manual de Practicas de Electromagnetismo PDFDocumento48 páginasManual de Practicas de Electromagnetismo PDFJose Ildefonso Salmoran GarfiasAinda não há avaliações
- Curva de Magnetizacion en TransformadoresDocumento9 páginasCurva de Magnetizacion en TransformadoresEnrique Jara AlfaroAinda não há avaliações
- Informe N 04 Laboratorio Maquinas ElectricasDocumento14 páginasInforme N 04 Laboratorio Maquinas ElectricasLiv Margunn Gutierrez HuancaAinda não há avaliações
- Manual Modulo PDFDocumento64 páginasManual Modulo PDFHal34329Ainda não há avaliações
- Conductores Electricos de Baja TensionDocumento4 páginasConductores Electricos de Baja TensionJeudy AsencioAinda não há avaliações
- Válvulas y Circuitos NeumáticosDocumento62 páginasVálvulas y Circuitos NeumáticosDuilio NinaAinda não há avaliações
- ACOTADODocumento8 páginasACOTADOleidyAinda não há avaliações
- Cocientes Notables Teoria y PracticaDocumento2 páginasCocientes Notables Teoria y PracticalilianmaribellaAinda não há avaliações
- Transformadores 2 2924 1Documento42 páginasTransformadores 2 2924 1Mijael PaucarAinda não há avaliações
- Clase3 - Arrollamientos - Corrientes Parasitas en El TransformadorDocumento111 páginasClase3 - Arrollamientos - Corrientes Parasitas en El TransformadorIván M Ch100% (1)
- Cálculo BobinadoDocumento12 páginasCálculo Bobinadojorge042111Ainda não há avaliações
- Acotamiento Cap.2 SSDocumento20 páginasAcotamiento Cap.2 SSAldo AlarconAinda não há avaliações
- Jaula de ArdillaDocumento139 páginasJaula de ArdillaGonza P'aAinda não há avaliações
- Calibracion de Conductores ElectricosDocumento53 páginasCalibracion de Conductores ElectricosRubén Darío Cárdenas EspinosaAinda não há avaliações
- Circuitos DCDocumento60 páginasCircuitos DCRazorhellsAinda não há avaliações
- Potencia de Circuitos TrifacicosDocumento16 páginasPotencia de Circuitos Trifacicosmoises rodriguezAinda não há avaliações
- Diagnostico Situacional y Potencialidades de La Region ArequipaDocumento23 páginasDiagnostico Situacional y Potencialidades de La Region ArequipaJuan Diego Quito CoilaAinda não há avaliações
- Circuito DC PDFDocumento10 páginasCircuito DC PDFJeison FernandoAinda não há avaliações
- Laboratorio 03Documento6 páginasLaboratorio 03Jeanpaul PachecoAinda não há avaliações
- Guía 4 Arranque Estrella - TriánguloDocumento8 páginasGuía 4 Arranque Estrella - TriánguloFerney FlorezAinda não há avaliações
- Pasos de BobinadoDocumento15 páginasPasos de BobinadoLuis Miguuel Sallo Mayta0% (1)
- FetiDocumento258 páginasFetiAnyiAinda não há avaliações
- Plan de Mantenimiento Semestral A Motor ElectricoDocumento1 páginaPlan de Mantenimiento Semestral A Motor Electricopedro castillo alvarezAinda não há avaliações
- Calculo de Transformadores MonofásicosDocumento7 páginasCalculo de Transformadores MonofásicosGerman Mario Mamani MamaniAinda não há avaliações
- Terma Electrica Debrysa Terma BryantDocumento11 páginasTerma Electrica Debrysa Terma BryantPOl Trigoso EchaizAinda não há avaliações
- Ejercitación PythonDocumento11 páginasEjercitación PythonWady GentilAinda não há avaliações
- Sensores de ProximidadDocumento34 páginasSensores de ProximidadJhimmy Jhoel Crisostomo PomaAinda não há avaliações
- DT - Práctica Nº9 - Interpretación de Vistas en Sistema Americano (ISO-A) y Europeo (ISO-E) PDFDocumento9 páginasDT - Práctica Nº9 - Interpretación de Vistas en Sistema Americano (ISO-A) y Europeo (ISO-E) PDFAlejandro MiraAinda não há avaliações
- Motores TrifasicosDocumento5 páginasMotores TrifasicosRoberto Edwin Montaño RoldanAinda não há avaliações
- Diagramas de Flujo de DatosDocumento44 páginasDiagramas de Flujo de DatosmaxovagaAinda não há avaliações
- Poliedros RegularesDocumento19 páginasPoliedros RegularesDiegoAinda não há avaliações
- ContactorDocumento8 páginasContactorgustavoAinda não há avaliações
- Conductores ElectricosDocumento21 páginasConductores ElectricosVictor Elias AquinoAinda não há avaliações
- Conductores, Semiconductores y AislantesDocumento10 páginasConductores, Semiconductores y AislantesMini G. NoizeAinda não há avaliações
- PythonDocumento29 páginasPythonOscar Patricio CaceresAinda não há avaliações
- Motores de Polos SubsecuentesDocumento7 páginasMotores de Polos SubsecuentesChaveliv Tiburonov KabronovskyAinda não há avaliações
- Op AmpDocumento38 páginasOp AmpRick TowAinda não há avaliações
- El Transformador Monofásico (Prueba de Vacío)Documento14 páginasEl Transformador Monofásico (Prueba de Vacío)Andrea Chavez CossioAinda não há avaliações
- Maquina Sincrona Barra Infinita-Li-2019 PDFDocumento24 páginasMaquina Sincrona Barra Infinita-Li-2019 PDFDarcy Ojeda OrmacheaAinda não há avaliações
- Corrienet Alterna Informe 10 Lfos200 Condori Condori Miguel AngelDocumento20 páginasCorrienet Alterna Informe 10 Lfos200 Condori Condori Miguel AngelMMIGUEL ANGELAinda não há avaliações
- Resolución Seminario N°2 - Gonzales Villanueva-CappettaDocumento9 páginasResolución Seminario N°2 - Gonzales Villanueva-CappettaFernando Abel Gonzales VAinda não há avaliações
- Levitador MagneticoDocumento2 páginasLevitador MagneticoluisAinda não há avaliações
- Pract 1Documento10 páginasPract 1Julio SalazarAinda não há avaliações
- Segundo Trabajo de Seguridad IndustrialDocumento5 páginasSegundo Trabajo de Seguridad IndustrialYhon Polanco AimitumaAinda não há avaliações
- CAP I - Memoria DescriptivaDocumento13 páginasCAP I - Memoria DescriptivaYhon Polanco AimitumaAinda não há avaliações
- CAP I - Memoria DescriptivaDocumento13 páginasCAP I - Memoria DescriptivaYhon Polanco AimitumaAinda não há avaliações
- Medidas 2 Lo Q FalDocumento5 páginasMedidas 2 Lo Q FalYhon Polanco AimitumaAinda não há avaliações
- Laboratorio Vii........Documento19 páginasLaboratorio Vii........Eduardo CarrionAinda não há avaliações
- Estudio de Corto CircuitoDocumento6 páginasEstudio de Corto CircuitoYhon Polanco AimitumaAinda não há avaliações
- Laboratorio IiiDocumento27 páginasLaboratorio IiiYhon Polanco AimitumaAinda não há avaliações
- El Convertidor Analógico DigitalDocumento11 páginasEl Convertidor Analógico DigitalAlex LodbrokAinda não há avaliações
- 2da Unidad Tensiones Normalizadas PDFDocumento45 páginas2da Unidad Tensiones Normalizadas PDFYhon Polanco AimitumaAinda não há avaliações
- Laboratorio IvDocumento19 páginasLaboratorio IvYhon Polanco AimitumaAinda não há avaliações
- Laboratorio Vii........Documento19 páginasLaboratorio Vii........Eduardo CarrionAinda não há avaliações
- Ley 29783Documento2 páginasLey 29783Yhon Polanco AimitumaAinda não há avaliações
- Laboratorio Vii........Documento19 páginasLaboratorio Vii........Eduardo CarrionAinda não há avaliações
- Laboratorio VDocumento18 páginasLaboratorio VYhon Polanco AimitumaAinda não há avaliações
- Ley 29783Documento2 páginasLey 29783Yhon Polanco AimitumaAinda não há avaliações
- Normas APA Sexta EdicionDocumento24 páginasNormas APA Sexta EdicionAndersontatto95% (20)
- Laboratorios Finales Arduino 2017Documento3 páginasLaboratorios Finales Arduino 2017Yhon Polanco AimitumaAinda não há avaliações
- Maq 3Documento9 páginasMaq 3Yhon Polanco AimitumaAinda não há avaliações
- Maq 3Documento3 páginasMaq 3Yhon Polanco AimitumaAinda não há avaliações
- PROYECTO Actividad Laboral y Deserción Escolar 2015Documento86 páginasPROYECTO Actividad Laboral y Deserción Escolar 2015Yhon Polanco AimitumaAinda não há avaliações
- 3.1ra Unidad CALCULO MECANICO DE POSTES PDFDocumento34 páginas3.1ra Unidad CALCULO MECANICO DE POSTES PDFYhon Polanco AimitumaAinda não há avaliações
- Graficas de La Resolucion Del Problema 5.8 de MAQ 3Documento4 páginasGraficas de La Resolucion Del Problema 5.8 de MAQ 3Yhon Polanco AimitumaAinda não há avaliações
- Tercera Unidad FormulacionDocumento55 páginasTercera Unidad FormulacionYhon Polanco AimitumaAinda não há avaliações
- 39e9c5b2 PDFDocumento17 páginas39e9c5b2 PDFYhon Polanco AimitumaAinda não há avaliações
- Anexo 2 Mapa de Principales Centrales Electricas PDFDocumento2 páginasAnexo 2 Mapa de Principales Centrales Electricas PDFYhon Polanco AimitumaAinda não há avaliações
- Diseño de Maquinas II Parte Iyii CompletoDocumento8 páginasDiseño de Maquinas II Parte Iyii CompletoYhon Polanco AimitumaAinda não há avaliações
- Proyecto Modelo Del Grifo RepsolDocumento7 páginasProyecto Modelo Del Grifo RepsolYhon Polanco AimitumaAinda não há avaliações
- Arrancadores Estado Sólido PDFDocumento36 páginasArrancadores Estado Sólido PDFYhon Polanco AimitumaAinda não há avaliações
- Capitulo I Control I Teoria 2016 IDocumento17 páginasCapitulo I Control I Teoria 2016 IYhon Polanco AimitumaAinda não há avaliações
- XG1614AC-Maintenance Manual-SpanishDocumento129 páginasXG1614AC-Maintenance Manual-SpanishxemartAinda não há avaliações
- Actividad 1.2 Power Over Ethernet (PoV)Documento10 páginasActividad 1.2 Power Over Ethernet (PoV)carlos felipe pimienta morenoAinda não há avaliações
- Cne-Sumnistro Seccion 190Documento16 páginasCne-Sumnistro Seccion 190Walter E. Mendoza HumppireAinda não há avaliações
- Filosofía de Las Protecciones EléctricasDocumento7 páginasFilosofía de Las Protecciones EléctricasPedro Midinas100% (1)
- Electronica de Potencia 1Documento17 páginasElectronica de Potencia 1Igy MoránAinda não há avaliações
- Cuchilla MonopolarDocumento3 páginasCuchilla MonopolarManuel ReyesAinda não há avaliações
- Variaciones de Vbe y Beta Con La TemperaturaDocumento7 páginasVariaciones de Vbe y Beta Con La TemperaturaMatias LopezAinda não há avaliações
- 01-El-Mc - Diseño Electrico Local 283 VTDocumento12 páginas01-El-Mc - Diseño Electrico Local 283 VTJenny TorresAinda não há avaliações
- Manual EST 120 kVADocumento7 páginasManual EST 120 kVAJose Eduardo Huarcaya DominguezAinda não há avaliações
- Filtros P1 325 G1 MarDChDocumento17 páginasFiltros P1 325 G1 MarDChBorisMaldiniRodriguezCalvimontesAinda não há avaliações
- 03 Osciladores PDFDocumento49 páginas03 Osciladores PDFledys correaAinda não há avaliações
- Eliminar Armonicas Con Transformadores Corregido PDFDocumento6 páginasEliminar Armonicas Con Transformadores Corregido PDFSánchez Noska100% (1)
- Parciales de Fisica IIDocumento26 páginasParciales de Fisica IIGrosnman AlenberthpAinda não há avaliações
- 05 Motores A Paso Descripcion de CaracteristicasDocumento15 páginas05 Motores A Paso Descripcion de CaracteristicasPaco mataoAinda não há avaliações
- AA1 ElectricidadDocumento11 páginasAA1 ElectricidadleopiAinda não há avaliações
- Marco Teórico de Practica 10 Lab Fisica 3Documento2 páginasMarco Teórico de Practica 10 Lab Fisica 3Fernando Santiago Garcia PerezAinda não há avaliações
- Tutorial de ElectronicaDocumento29 páginasTutorial de ElectronicaTheKillerGoat 3003Ainda não há avaliações
- Labo3 InformeDocumento8 páginasLabo3 InformeJemsen ChapoñanAinda não há avaliações
- Diplomado en Electronica y Electricidad IndustrialDocumento2 páginasDiplomado en Electronica y Electricidad Industrialcarlos18102Ainda não há avaliações
- Guia de Reparacion t2tDocumento21 páginasGuia de Reparacion t2tPanda MixAinda não há avaliações
- OP-PETS-SE-011-Montaje de Banco de BateriasDocumento7 páginasOP-PETS-SE-011-Montaje de Banco de Bateriasjunior bravoAinda não há avaliações
- El Circuito Eléctrico Del Ascensor de 3 NivelesDocumento4 páginasEl Circuito Eléctrico Del Ascensor de 3 NivelesJair Ojeda Huarancca100% (1)
- INFORME DE LABORATORIO 1 Física ElectromagnéticaDocumento8 páginasINFORME DE LABORATORIO 1 Física ElectromagnéticaKAREN VALENTINA HERRERA ROZOAinda não há avaliações
- Tema 3-Potencial EléctricoDocumento17 páginasTema 3-Potencial EléctricoPablo CentenoAinda não há avaliações
- Pregunta Segu. Electrica PDFDocumento3 páginasPregunta Segu. Electrica PDFRaul Mendoza ZevallosAinda não há avaliações
- Electrometalurgia T. Grupal Extractiva II Corregido 2Documento52 páginasElectrometalurgia T. Grupal Extractiva II Corregido 2marcoAinda não há avaliações
- NTP+350 062-3+extintores+portatiles PDFDocumento15 páginasNTP+350 062-3+extintores+portatiles PDFjeanplqAinda não há avaliações
- Plan de Sesión 05 Eea - IiDocumento3 páginasPlan de Sesión 05 Eea - IiWaly Jacinto MoriAinda não há avaliações
- El Transistor de Efecto de Campo-Ultimo Lab.Documento8 páginasEl Transistor de Efecto de Campo-Ultimo Lab.Claudio Benites CruzAinda não há avaliações
- Puesta A Tierra Baja TensionDocumento3 páginasPuesta A Tierra Baja TensionLuis BardalesAinda não há avaliações