Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- Development: JavascjpdumpsDocumento12 páginasDevelopment: JavascjpdumpsEdisonAinda não há avaliações
- Blacklisted Developers - South IndiaDocumento6 páginasBlacklisted Developers - South Indiainfosuren50% (2)
- Assest Classification PolicyDocumento31 páginasAssest Classification PolicyEdison100% (1)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Asst Comm Labour OfficerDocumento21 páginasAsst Comm Labour OfficerMullaiperiyar DamAinda não há avaliações
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Mohammed J. Zaki and Wagner Meira, JR: Second Edition Cambridge University Press, March 2020 ISBN: 978-1108473989Documento1 páginaMohammed J. Zaki and Wagner Meira, JR: Second Edition Cambridge University Press, March 2020 ISBN: 978-1108473989EdisonAinda não há avaliações
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Analysis of Eight Data Mining Algorithms For Smarter - 2016 - Procedia ComputerDocumento6 páginasAnalysis of Eight Data Mining Algorithms For Smarter - 2016 - Procedia Computersumit RAUTHANAinda não há avaliações
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Security PoliciesDocumento3 páginasSecurity PoliciesEdisonAinda não há avaliações
- Cyber Security TutsDocumento25 páginasCyber Security TutsEdisonAinda não há avaliações
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Garbage Collections: JavascjpdumpsDocumento4 páginasGarbage Collections: JavascjpdumpsEdisonAinda não há avaliações
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- How To Develop Policies and Procedures DIY Committee GuideDocumento214 páginasHow To Develop Policies and Procedures DIY Committee GuideEdison100% (1)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- 20 Top Cyber Security Tools To Look Out For in 2020Documento17 páginas20 Top Cyber Security Tools To Look Out For in 2020EdisonAinda não há avaliações
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Only Official Website Palani Arulmigu Dhandayuthapaniswamy Temple PDFDocumento5 páginasOnly Official Website Palani Arulmigu Dhandayuthapaniswamy Temple PDFEdisonAinda não há avaliações
- InternationalizationDocumento9 páginasInternationalizationEdisonAinda não há avaliações
- Security PoliciesDocumento3 páginasSecurity PoliciesEdisonAinda não há avaliações
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- Preview Our Courses - MPS in Technology Entrepreneurship - Edison - Gis@gmailDocumento1 páginaPreview Our Courses - MPS in Technology Entrepreneurship - Edison - Gis@gmailEdisonAinda não há avaliações
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Mendeley: Style Installation InstructionsDocumento1 páginaMendeley: Style Installation InstructionsEdisonAinda não há avaliações
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- How To Avoid PlagiarismDocumento3 páginasHow To Avoid PlagiarismEdisonAinda não há avaliações
- Nutrition and DigestionDocumento17 páginasNutrition and DigestionR Ifan Arief FahruroziAinda não há avaliações
- NASBA (Molecular Biology) : ReferencesDocumento2 páginasNASBA (Molecular Biology) : ReferencesEdisonAinda não há avaliações
- Internet of Things (Iot) : Course ContentDocumento1 páginaInternet of Things (Iot) : Course ContentEdisonAinda não há avaliações
- Master's Degree in Entrepreneurship and Innovation - Register For A Webinar Today!Documento2 páginasMaster's Degree in Entrepreneurship and Innovation - Register For A Webinar Today!EdisonAinda não há avaliações
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Master's Degree in Entrepreneurship and Innovation - Register For A Webinar Today!Documento2 páginasMaster's Degree in Entrepreneurship and Innovation - Register For A Webinar Today!EdisonAinda não há avaliações
- Swaym GuideDocumento17 páginasSwaym GuideEdisonAinda não há avaliações
- M3u8 To mp4Documento3 páginasM3u8 To mp4EdisonAinda não há avaliações
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- 1-Structure of AtomDocumento5 páginas1-Structure of AtomPrachi KariaAinda não há avaliações
- Asymptotic NotationDocumento11 páginasAsymptotic NotationEdisonAinda não há avaliações
- What NextDocumento10 páginasWhat NextbalajiAinda não há avaliações
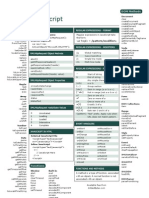
- Javascript Cheat SheetDocumento1 páginaJavascript Cheat Sheetdanielle leigh100% (4)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (120)
- Ac 2012-2974: Engineering Laboratory Enhancement Through Cloud ComputingDocumento8 páginasAc 2012-2974: Engineering Laboratory Enhancement Through Cloud ComputingEdisonAinda não há avaliações
- ThWhitman Matt A Case StudyDocumento9 páginasThWhitman Matt A Case StudyEdisonAinda não há avaliações
- GST - Global Smart Technologies Center: Setup and Run Codefest Server On PCDocumento11 páginasGST - Global Smart Technologies Center: Setup and Run Codefest Server On PCĐại Phạm TrọngAinda não há avaliações
- Rebecca A. King, Et. Al., v. Facebook Inc.Documento43 páginasRebecca A. King, Et. Al., v. Facebook Inc.Michael_Lee_RobertsAinda não há avaliações
- Apple IIgs Demo SamplerDocumento6 páginasApple IIgs Demo SamplerduesenAinda não há avaliações
- Blue Toot 1Documento25 páginasBlue Toot 1shanin2006Ainda não há avaliações
- CBM292 - 293 Service ManualDocumento26 páginasCBM292 - 293 Service ManualHaïthem BEN SALEMAinda não há avaliações
- Project 1 Creating A Dynamic Web Page: Header - PHP Footer - PHPDocumento4 páginasProject 1 Creating A Dynamic Web Page: Header - PHP Footer - PHPIvan PangitAinda não há avaliações
- Azure Virtual DatacenterDocumento231 páginasAzure Virtual Datacenterchadi.scribd7206Ainda não há avaliações
- 2X-SS22-ROW04 - Licence Server V1.5 RequirementsDocumento6 páginas2X-SS22-ROW04 - Licence Server V1.5 Requirementsmhusnain8585942Ainda não há avaliações
- AU6850 Datasheet: USB Host MP3 Decoder SOCDocumento20 páginasAU6850 Datasheet: USB Host MP3 Decoder SOCOswaldo Rengifo MuozAinda não há avaliações
- MQTTDocumento9 páginasMQTTAsistencia Técnica JLFAinda não há avaliações
- Cable HDMI 10 MetrosDocumento3 páginasCable HDMI 10 Metroschristian eduardoAinda não há avaliações
- Satellite - Client Configuration GuideDocumento40 páginasSatellite - Client Configuration Guideseafish666666Ainda não há avaliações
- Become A Channel PartnerDocumento1 páginaBecome A Channel PartnerUsama MehboobAinda não há avaliações
- Common Call Disconnection Cause CodesDocumento10 páginasCommon Call Disconnection Cause CodesUjjwal GoelAinda não há avaliações
- (REDEX) - Scrum MasterDocumento3 páginas(REDEX) - Scrum MasterAly Pasha MohamedAinda não há avaliações
- III Year April, 2019Documento3 páginasIII Year April, 2019J chandramohanAinda não há avaliações
- 4M Parts Warehouse Selects Epicor Vision NR ENS 021412Documento2 páginas4M Parts Warehouse Selects Epicor Vision NR ENS 021412Sergio Espinoza MéndezAinda não há avaliações
- Web Application Class XI Unit 1 NotesDocumento14 páginasWeb Application Class XI Unit 1 NotesNaina Kanojia90% (10)
- E-Commerce: - Semester: Sixth - Course No: CSC370 - By: Diwakar UpadhyayaDocumento24 páginasE-Commerce: - Semester: Sixth - Course No: CSC370 - By: Diwakar UpadhyayaBibek karnaAinda não há avaliações
- SOYEA LCD Service Manual PDFDocumento40 páginasSOYEA LCD Service Manual PDFraipedriAinda não há avaliações
- Machine Learning Approach To Select Optimal Task Scheduling Algorithm in CloudDocumento16 páginasMachine Learning Approach To Select Optimal Task Scheduling Algorithm in CloudKaouther BenaliAinda não há avaliações
- 732 18CS643 Saba FatimaDocumento11 páginas732 18CS643 Saba Fatimakaro2336Ainda não há avaliações
- Market Basket Analysis Using Improved FP-treeDocumento4 páginasMarket Basket Analysis Using Improved FP-treeIIR indiaAinda não há avaliações
- Hacking: DR Sajeena SDocumento8 páginasHacking: DR Sajeena SSajeena RabeesAinda não há avaliações
- Energy Saving System Using IotDocumento38 páginasEnergy Saving System Using IotJigishaAinda não há avaliações
- Forticlient (Windows) - Release NotesDocumento17 páginasForticlient (Windows) - Release Noteslee zwagerAinda não há avaliações
- Commissioning and Integration LTE DUS - DULDocumento5 páginasCommissioning and Integration LTE DUS - DULColour BlindAinda não há avaliações
- Scrathch CardDocumento28 páginasScrathch CardMadhu PreethiAinda não há avaliações
- Analysis of Algorithms: DR - Eid RehmanDocumento8 páginasAnalysis of Algorithms: DR - Eid RehmanOnsa piarusAinda não há avaliações
- 5G Wireless SystemsDocumento27 páginas5G Wireless SystemsHari PurwadiAinda não há avaliações