Você também pode gostar
- 1 Secundaria RobóticaDocumento30 páginas1 Secundaria RobóticaDiana Vazquez Gaytan67% (3)
- Catalogo DrTool Herramientas de DeiagnosticoDocumento24 páginasCatalogo DrTool Herramientas de Deiagnosticocarlos malvaciaAinda não há avaliações
- Robótica II - Programación de robots y control dinámicoDocumento4 páginasRobótica II - Programación de robots y control dinámicojose2525Ainda não há avaliações
- Robótica UNFV SílaboDocumento6 páginasRobótica UNFV Sílabocarlos7624Ainda não há avaliações
- IA Introducción a la Inteligencia ArtificialDocumento52 páginasIA Introducción a la Inteligencia ArtificialRenato Schulz100% (1)
- Programación Analítica de Cálculo Diferencial e Integral IiDocumento12 páginasProgramación Analítica de Cálculo Diferencial e Integral IiJose RuedaAinda não há avaliações
- Y.249 02 (Elixa ZX) SpaDocumento228 páginasY.249 02 (Elixa ZX) Spahartur1280% (5)
- Silabos de RoboticaDocumento6 páginasSilabos de RoboticaJuan Carlos Gonzales ArosteAinda não há avaliações
- Silabo Robotica 2019-I - Palomares Orihuela RicardoDocumento6 páginasSilabo Robotica 2019-I - Palomares Orihuela RicardoChritzus Kevin AlexanderAinda não há avaliações
- Silabo RoboticaDocumento5 páginasSilabo RoboticaFABIO JIMENEZAinda não há avaliações
- Robotica II syllabusDocumento4 páginasRobotica II syllabusDiego ÁlvarezAinda não há avaliações
- BIC01Documento3 páginasBIC01George Salcedo DiazAinda não há avaliações
- CI171 Introducción A Los Métodos Computacionales 201700Documento6 páginasCI171 Introducción A Los Métodos Computacionales 201700marthae52Ainda não há avaliações
- Sílabo RoboticaDocumento5 páginasSílabo RoboticaKathy Meléndez PuicañoAinda não há avaliações
- BIC01-Intro Computación-I2Documento4 páginasBIC01-Intro Computación-I2Marco Antonio Vela RodriguezAinda não há avaliações
- Ingeniería de Control (Sílabo)Documento5 páginasIngeniería de Control (Sílabo)jhonatan cullas urbinaAinda não há avaliações
- Silabo de BIC01-Introducción A La ComputaciónDocumento3 páginasSilabo de BIC01-Introducción A La ComputaciónFrank Gomez Huaycochea0% (1)
- 01 IngSistemas - GD - 2014-021-Métodos NuméricosDocumento19 páginas01 IngSistemas - GD - 2014-021-Métodos NuméricosJem PrestonAinda não há avaliações
- 01 IngSistemas GD 2014-021-Métodos Numéricos 1560026719Documento14 páginas01 IngSistemas GD 2014-021-Métodos Numéricos 1560026719Eli MendezAinda não há avaliações
- 100000IN13 CalculoAplicadoALaFisica1REMOTODocumento11 páginas100000IN13 CalculoAplicadoALaFisica1REMOTOJotacheq NacionalAinda não há avaliações
- BIC01 Introducción A La Computación DEFINITIVO PDFDocumento3 páginasBIC01 Introducción A La Computación DEFINITIVO PDFDalina Cortez DTAinda não há avaliações
- Guía para El Desarrollo Del Componente PrácticoDocumento7 páginasGuía para El Desarrollo Del Componente PrácticoJvelasve VeAinda não há avaliações
- Guía de Actividades y Rúbrica de Evaluación Paso 1 - Proponer Las Soluciones Computacionales A Los Problemas DadosDocumento10 páginasGuía de Actividades y Rúbrica de Evaluación Paso 1 - Proponer Las Soluciones Computacionales A Los Problemas DadosShenny WhiteAinda não há avaliações
- Robótica Industrial U. MendozaDocumento5 páginasRobótica Industrial U. MendozacOrekernAinda não há avaliações
- 131700unidad Didactica de Robotica Educativa LabsLandDocumento82 páginas131700unidad Didactica de Robotica Educativa LabsLandCamilo PinedaAinda não há avaliações
- 1 (4 Files Merged)Documento4 páginas1 (4 Files Merged)Miguel OrdoñezAinda não há avaliações
- Cálculo Integral UNIDocumento37 páginasCálculo Integral UNIOrtiz Huahualuque Jherson juanAinda não há avaliações
- MT417 Procesamiento Digital de Senales 2015-1Documento4 páginasMT417 Procesamiento Digital de Senales 2015-1cjoel1811Ainda não há avaliações
- Programa Robótica 2do AñoDocumento28 páginasPrograma Robótica 2do AñoMariela PortilloAinda não há avaliações
- ROBOTICADocumento12 páginasROBOTICAErnesto Alonso Armenta QuinteroAinda não há avaliações
- LB0743 Control DigitalDocumento3 páginasLB0743 Control DigitalJGJ nobetaAinda não há avaliações
- Iniciación programación robótica LabsLandDocumento81 páginasIniciación programación robótica LabsLandElisa Gil BautistaAinda não há avaliações
- Unidad_Didactica_de_Robotica_Educativa_LabsLandDocumento81 páginasUnidad_Didactica_de_Robotica_Educativa_LabsLandCarlos Augusto CholcaAinda não há avaliações
- Laboratorio 133333Documento10 páginasLaboratorio 133333Onil Alex VeranoAinda não há avaliações
- 100000E06L IngenieriaDeControlIndustrialDocumento5 páginas100000E06L IngenieriaDeControlIndustrialHugoAinda não há avaliações
- Silabo Electronica Digital Uns 2011 2Documento2 páginasSilabo Electronica Digital Uns 2011 2Katerinne Vilchez AcuñaAinda não há avaliações
- 100000T02L CalculoAplicadoALaFisica1Documento10 páginas100000T02L CalculoAplicadoALaFisica1anon_927365513Ainda não há avaliações
- Sílabo-Introducción A La computación-FIM-19-2Documento3 páginasSílabo-Introducción A La computación-FIM-19-2Cristopher RufastoAinda não há avaliações
- SC-115 Programacion Basica PDFDocumento7 páginasSC-115 Programacion Basica PDFDarian Vindas AlfaroAinda não há avaliações
- Ce 0204Documento6 páginasCe 0204ALEXANDERAinda não há avaliações
- BIC01-Introducción A La Computación - Final PDFDocumento2 páginasBIC01-Introducción A La Computación - Final PDFgianAinda não há avaliações
- SILABO - PrincipiosDeAlgoritmosDocumento9 páginasSILABO - PrincipiosDeAlgoritmosYrvin Arana ValenciaAinda não há avaliações
- Métodos numéricos FACINGDocumento4 páginasMétodos numéricos FACINGJoseph Condori CahuiAinda não há avaliações
- 100000G25T PrincipiosDeAlgoritmosDocumento5 páginas100000G25T PrincipiosDeAlgoritmosADM JLAinda não há avaliações
- Sílabo - Investigación de OperacionesDocumento5 páginasSílabo - Investigación de OperacionessergdesAinda não há avaliações
- Curricula Mce-1116microcontroladoresDocumento3 páginasCurricula Mce-1116microcontroladoresMiguel OrdoñezAinda não há avaliações
- 3 Secundaria RobóticaDocumento20 páginas3 Secundaria RobóticaAdrián ramirezAinda não há avaliações
- 100000I38N SistemasDeControlDigitalDocumento4 páginas100000I38N SistemasDeControlDigitalluis_15169Ainda não há avaliações
- TE19 Sistemas de Comunicaciones 202101Documento6 páginasTE19 Sistemas de Comunicaciones 202101jeraldinAinda não há avaliações
- Control y automatización de procesos (IS-541Documento2 páginasControl y automatización de procesos (IS-541Jorge Daniel Menendez LopezAinda não há avaliações
- Silabo ROBOTICADocumento10 páginasSilabo ROBOTICARICARDO ALEXANDER LAZARO SANCHEZAinda não há avaliações
- Silabo Mat Iv 19 1 V2Documento6 páginasSilabo Mat Iv 19 1 V2Boris Salirrosas del AguilaAinda não há avaliações
- Manual Laboratorios Electrónica AnalógicaDocumento32 páginasManual Laboratorios Electrónica AnalógicaManuel DelgadoAinda não há avaliações
- 100000G25T PrincipiosDeAlgoritmosDocumento5 páginas100000G25T PrincipiosDeAlgoritmosPedro NeiraAinda não há avaliações
- Taller de RoboticaDocumento4 páginasTaller de RoboticaFranco RM10Ainda não há avaliações
- Silabo Sistemas Digitales 2018 IDocumento4 páginasSilabo Sistemas Digitales 2018 IRichard Armas CastañedaAinda não há avaliações
- Introducción a la Programación en PythonDocumento8 páginasIntroducción a la Programación en PythonFrancisco FloresAinda não há avaliações
- Robotica PDFDocumento5 páginasRobotica PDFNivek ArturoAinda não há avaliações
- MATEMATICAPARAINGENIEROSI UndefinedDocumento5 páginasMATEMATICAPARAINGENIEROSI UndefinedLeycrow RatzingerAinda não há avaliações
- Simuladores ElectricidadDocumento22 páginasSimuladores Electricidadleidy xiomaraAinda não há avaliações
- Elec 184 641 Inte M 20200504120543Documento20 páginasElec 184 641 Inte M 20200504120543Miguel Cerreño ChavezAinda não há avaliações
- Guía de Trabajo Actividad Práctica Simulado - Tarea 4 - Informe de Trabajo PrácticoDocumento10 páginasGuía de Trabajo Actividad Práctica Simulado - Tarea 4 - Informe de Trabajo PrácticoCarlos MR0% (1)
- CireleccDocumento42 páginasCireleccErick Sandro Maguiña SanchezAinda não há avaliações
- Plan Labs 2012-IDocumento3 páginasPlan Labs 2012-IErick Sandro Maguiña SanchezAinda não há avaliações
- CireleccDocumento49 páginasCireleccFranz Montero RamirezAinda não há avaliações
- Programacion 2012 IDocumento3 páginasProgramacion 2012 IErick Sandro Maguiña SanchezAinda não há avaliações
- fx-9860GII SD fx-9860GII fx-9860G AU PLUS fx-9860G SD fx-9860G fx-9860G AU fx-9750G fx-7400G Software Versión 2.0Documento411 páginasfx-9860GII SD fx-9860GII fx-9860G AU PLUS fx-9860G SD fx-9860G fx-9860G AU fx-9750G fx-7400G Software Versión 2.0Erick Sandro Maguiña SanchezAinda não há avaliações
- Controldeprocesosindustriales1 Tema4 Modelamientomatemtico 120811210345 Phpapp01Documento84 páginasControldeprocesosindustriales1 Tema4 Modelamientomatemtico 120811210345 Phpapp01Erick Sandro Maguiña SanchezAinda não há avaliações
- T Espe 049160Documento227 páginasT Espe 049160Erick Sandro Maguiña Sanchez0% (1)
- CD 6348 PDFDocumento268 páginasCD 6348 PDFErick Sandro Maguiña SanchezAinda não há avaliações
- Control Pid Temp Snsor Lm35 Explic CompletaDocumento10 páginasControl Pid Temp Snsor Lm35 Explic CompletaOscar Fernando Giraldo GiraldoAinda não há avaliações
- Troubleshooting Ender3 LukeHatfieldDocumento81 páginasTroubleshooting Ender3 LukeHatfieldErick Sandro Maguiña SanchezAinda não há avaliações
- Cálculo Multivariado y Ecuaciones DiferencialesDocumento116 páginasCálculo Multivariado y Ecuaciones DiferencialesFranciscoLunaAinda não há avaliações
- Obl Introducción SDHDocumento45 páginasObl Introducción SDHIvan NúñezAinda não há avaliações
- EXPOMATE2Documento13 páginasEXPOMATE2Erick Sandro Maguiña SanchezAinda não há avaliações
- Transformada FourierDocumento81 páginasTransformada FourierFrancisco FloresAinda não há avaliações
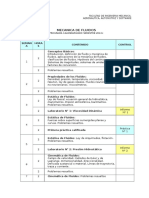
- 7 Fluidos Utp 2012Documento9 páginas7 Fluidos Utp 2012Erick Sandro Maguiña SanchezAinda não há avaliações
- CireleccDocumento49 páginasCireleccFranz Montero RamirezAinda não há avaliações
- Maximos y MinimosDocumento15 páginasMaximos y Minimospalacios1993100% (1)
- ExpomateV 1 (Final CorregidoDocumento12 páginasExpomateV 1 (Final CorregidoErick Sandro Maguiña SanchezAinda não há avaliações
- PicRS232 VCPP y VBDocumento201 páginasPicRS232 VCPP y VBJose Alberto DrgAinda não há avaliações
- Seguridad Informatica PDFDocumento196 páginasSeguridad Informatica PDFAJ SotoAinda não há avaliações
- Integrales Dobles Utp2010Documento2 páginasIntegrales Dobles Utp2010Luis Ibañez SegoviaAinda não há avaliações
- Velocidad Del SonidoDocumento12 páginasVelocidad Del SonidoKevin MayorgaAinda não há avaliações
- Camara Foscam FI8918Documento33 páginasCamara Foscam FI8918Pablo Piriwenho GodoyAinda não há avaliações
- Sistemas de Reproducción de SonidoDocumento14 páginasSistemas de Reproducción de SonidoErick Sandro Maguiña SanchezAinda não há avaliações
- Valores ExtremosDocumento8 páginasValores Extremoskigada2Ainda não há avaliações
- Ccna 4.0 Exploration 1 Esp PDFDocumento426 páginasCcna 4.0 Exploration 1 Esp PDFjohnatan21Ainda não há avaliações
- Moduladores Sigma DeltaDocumento11 páginasModuladores Sigma DeltaRecuerdos En Blanco OotAinda não há avaliações
- Variable Compleja - Hauser (Creo)Documento87 páginasVariable Compleja - Hauser (Creo)EternaOzkuridaAinda não há avaliações
- Autoevaluacion Ip2577 Ingenieria de ProcesosDocumento6 páginasAutoevaluacion Ip2577 Ingenieria de ProcesosJuan C Franco100% (2)
- 11 - Taller 07 - Enseñanza Estadistica InfostatDocumento3 páginas11 - Taller 07 - Enseñanza Estadistica Infostatfdo2004Ainda não há avaliações
- ConocimientoDocumento5 páginasConocimientoAndrea GonzálezAinda não há avaliações
- Análisis factibilidad proyecto investigación emprendimiento cuarentenaDocumento2 páginasAnálisis factibilidad proyecto investigación emprendimiento cuarentenaorellanairiasaAinda não há avaliações
- David Wilfredo Delgado OsoresDocumento4 páginasDavid Wilfredo Delgado OsoresDivad Odagled SerosoAinda não há avaliações
- Código de Ética y Práctica Profesional de Ingeniería de SoftwareDocumento11 páginasCódigo de Ética y Práctica Profesional de Ingeniería de SoftwareKeep WalkingAinda não há avaliações
- Planeación Estratégica de Tecnología InformáticaDocumento2 páginasPlaneación Estratégica de Tecnología InformáticaMichael Ariel CardenasAinda não há avaliações
- Ingeniero Mecanico PV AC 18Documento3 páginasIngeniero Mecanico PV AC 18Eric RamirezAinda não há avaliações
- Tesis Tarea 1 CorregidoDocumento4 páginasTesis Tarea 1 Corregidosoporte soportesAinda não há avaliações
- Portafolio Digital Auditoria - Docx InformacionDocumento10 páginasPortafolio Digital Auditoria - Docx InformacionvictordefazAinda não há avaliações
- Control Parque Eólico Los CururosDocumento1 páginaControl Parque Eólico Los CururosPhilippe ContrerasAinda não há avaliações
- SICOSEG - Entregable 2Documento58 páginasSICOSEG - Entregable 2BrianAinda não há avaliações
- Articulo Metrologia IndustrialDocumento6 páginasArticulo Metrologia Industrialgerardo7alberto7mu7oAinda não há avaliações
- Diseño Curricular - Interpretación de Planos para Maquinaria IndustrialDocumento4 páginasDiseño Curricular - Interpretación de Planos para Maquinaria Industrialivancho310Ainda não há avaliações
- Las primeras normas eléctricas 1896-1904Documento6 páginasLas primeras normas eléctricas 1896-1904Cuc CucAinda não há avaliações
- Control estadístico de calidad en ingenieríaDocumento5 páginasControl estadístico de calidad en ingenieríaGabriela Celis JóoAinda não há avaliações
- Acta de sesión ordinaria del Consejo de Facultad de Ingeniería Pesquera y de Alimentos de la Universidad Nacional del CallaoDocumento8 páginasActa de sesión ordinaria del Consejo de Facultad de Ingeniería Pesquera y de Alimentos de la Universidad Nacional del CallaoCristina CabreraAinda não há avaliações
- INFORME 3 - Reduccion de TamañoDocumento18 páginasINFORME 3 - Reduccion de TamañoJoshua SangAinda não há avaliações
- Conclusion EsDocumento3 páginasConclusion EsArthur CochachinAinda não há avaliações
- Cap 1Documento28 páginasCap 1Francisco MuñozAinda não há avaliações
- MecatronicaDocumento14 páginasMecatronicaPedro Katriel Alvarez De la Cruz100% (1)
- Diseño de La AutomatizaciónDocumento20 páginasDiseño de La AutomatizaciónAndrés ProañoAinda não há avaliações
- Trabajo Daniela ResumenDocumento20 páginasTrabajo Daniela ResumenIvan E.P.MendozaAinda não há avaliações
- Restricción SQLDocumento18 páginasRestricción SQLLuisLlocllaYesquénAinda não há avaliações
- Secuencia 1Documento4 páginasSecuencia 1Dulce Maria Martinez RiveraAinda não há avaliações
- 02 Sistema de Numeración DecimalDocumento3 páginas02 Sistema de Numeración DecimalIvan Cornejo MedinaAinda não há avaliações
- Designación Equipos de Trabajo - Proyecto DosDocumento5 páginasDesignación Equipos de Trabajo - Proyecto DosJohanaAinda não há avaliações
- Programa Mailing 2011Documento21 páginasPrograma Mailing 2011encarni_museoAinda não há avaliações