Você também pode gostar
- Wind Turbine Safety WPDocumento8 páginasWind Turbine Safety WPRob Chris EllisAinda não há avaliações
- Wind TurbineDocumento21 páginasWind TurbineroshanAinda não há avaliações
- Wind Power PlantsDocumento19 páginasWind Power Plantsrezaur rahmanAinda não há avaliações
- FPS Wind Turbine Rotor Balance Article PublishCDocumento12 páginasFPS Wind Turbine Rotor Balance Article PublishCmlenzAinda não há avaliações
- Maintaining Wind Power PlantsDocumento42 páginasMaintaining Wind Power PlantsSipembual BualiAinda não há avaliações
- Everything You Need to Know About Wind EnergyDocumento87 páginasEverything You Need to Know About Wind EnergyOmar KeshkAinda não há avaliações
- Yaw Systems For Wind TurbinesDocumento11 páginasYaw Systems For Wind Turbinesmehdi amelAinda não há avaliações
- Design of Wind Turbine BladesDocumento13 páginasDesign of Wind Turbine BladesmasoodkamaliAinda não há avaliações
- Question 5 PDFDocumento12 páginasQuestion 5 PDFiee03303o3p993Manikandan RajendranAinda não há avaliações
- EME Unit 2 Turbines PPT by Kalyan ChakravarthyDocumento64 páginasEME Unit 2 Turbines PPT by Kalyan ChakravarthyvenkatAinda não há avaliações
- Wind Turbine Rotor Balance Static V Dynamic Rev4 ExtDocumento14 páginasWind Turbine Rotor Balance Static V Dynamic Rev4 ExtmlenzAinda não há avaliações
- VesselsDocumento34 páginasVesselskush149Ainda não há avaliações
- Wind Turbine FinalDocumento5 páginasWind Turbine Finalcrocket2308Ainda não há avaliações
- University of Gujrat: Wind EnergyDocumento47 páginasUniversity of Gujrat: Wind EnergyHimanshu KhannaAinda não há avaliações
- ThesisDocumento7 páginasThesisAkshayJhaAinda não há avaliações
- Wind Turbine Design ProcedureDocumento4 páginasWind Turbine Design ProcedureEkambaramMuniyandi100% (1)
- Alatas ComDocumento6 páginasAlatas ComsamAinda não há avaliações
- No. 47 Shipbuilding and Repair Quality Standard Rev. 7-2013Documento24 páginasNo. 47 Shipbuilding and Repair Quality Standard Rev. 7-2013JRodAinda não há avaliações
- Offsite1 Presentation FinalDocumento47 páginasOffsite1 Presentation FinalNguyen Phi HaiAinda não há avaliações
- Stress and Modal Analysis of a Wind Turbine BladeDocumento36 páginasStress and Modal Analysis of a Wind Turbine BladeSilvio NunesAinda não há avaliações
- Week 3 - History - Introduction and Current Developments of Project Management (Student's Version 2.0)Documento67 páginasWeek 3 - History - Introduction and Current Developments of Project Management (Student's Version 2.0)Fadhli Fegious100% (1)
- Literature Review On Design and Development of Vertical Axis Wind Turbine BladeDocumento6 páginasLiterature Review On Design and Development of Vertical Axis Wind Turbine BladeKrishna MurthiAinda não há avaliações
- Wind Tower PDFDocumento8 páginasWind Tower PDFversiondemo1749Ainda não há avaliações
- Mechanical Energy StorageDocumento24 páginasMechanical Energy StorageVinoth MalaikaniAinda não há avaliações
- Handling Ropes and WiresDocumento22 páginasHandling Ropes and WiresSeaman NavigatorAinda não há avaliações
- Chap 31 PDFDocumento14 páginasChap 31 PDFnelson escuderoAinda não há avaliações
- 24 Struktur Wind TurbinDocumento8 páginas24 Struktur Wind TurbinErwin BondanAinda não há avaliações
- DAHAN Derrick CraneDocumento1 páginaDAHAN Derrick CraneDahanTowerCraneAinda não há avaliações
- Condition Assessment - HT Machine PDFDocumento20 páginasCondition Assessment - HT Machine PDFA.YOGAGURUAinda não há avaliações
- TOM - Understanding Flywheel Function and Turning Moment DiagramsDocumento62 páginasTOM - Understanding Flywheel Function and Turning Moment DiagramsSudarson KarthikeyanAinda não há avaliações
- Vibration Damping Techniques in Wind Turbine BladesDocumento16 páginasVibration Damping Techniques in Wind Turbine BladesRahul PatilAinda não há avaliações
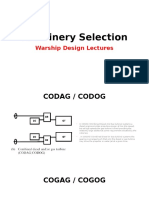
- Machinery Selection and Warship Design LecturesDocumento31 páginasMachinery Selection and Warship Design Lecturesknowme73Ainda não há avaliações
- Wind Power PlantDocumento64 páginasWind Power PlantKenneth GabrielAinda não há avaliações
- User Manual - MSIMMA - Rev5 PDFDocumento130 páginasUser Manual - MSIMMA - Rev5 PDFiuliiulianAinda não há avaliações
- Electric Propulsion SystemDocumento2 páginasElectric Propulsion SystemABIR MUKHERJEEAinda não há avaliações
- 22.wire RopeSelection enDocumento6 páginas22.wire RopeSelection enT ThirumuruganAinda não há avaliações
- Modu MasDocumento34 páginasModu MasArturo PerezAinda não há avaliações
- Steam Prime Mover, Steam Condenser, and Feedwater PumpDocumento44 páginasSteam Prime Mover, Steam Condenser, and Feedwater PumpLofi Radio100% (1)
- Turbine Rotor Design StudyDocumento84 páginasTurbine Rotor Design StudylucioctsicilAinda não há avaliações
- Wind Power PlantDocumento9 páginasWind Power Plantvigneshgemini100% (1)
- Machine Tool Failure Data AnalysisDocumento9 páginasMachine Tool Failure Data AnalysisPatrisonAinda não há avaliações
- Under Wind MillDocumento32 páginasUnder Wind MillArjun DasAinda não há avaliações
- Guidelines for securing loose studs in anchor chain by weldingDocumento10 páginasGuidelines for securing loose studs in anchor chain by weldingchristianvanAinda não há avaliações
- Theory ManualDocumento110 páginasTheory Manualrick_santosAinda não há avaliações
- Material Used in Ship BuildingDocumento13 páginasMaterial Used in Ship BuildingSayantan MondalAinda não há avaliações
- Vertical Axis Wind TurbineDocumento13 páginasVertical Axis Wind TurbineMaheswari PerumalAinda não há avaliações
- New Active Speed Stall Control vs Pitch Control for Direct-Drive Wind TurbinesDocumento6 páginasNew Active Speed Stall Control vs Pitch Control for Direct-Drive Wind TurbinesjameelahmadAinda não há avaliações
- Power Cycle, Oil, Coal and Natural Gas Introduction To The Rankine Steam Cycle and Carnot EfficiencyDocumento69 páginasPower Cycle, Oil, Coal and Natural Gas Introduction To The Rankine Steam Cycle and Carnot EfficiencyLenin PaudelAinda não há avaliações
- Topics: - Potential and - UtilizationDocumento41 páginasTopics: - Potential and - UtilizationUtkarsh MishraAinda não há avaliações
- Wind Turbine Technical DescriptionDocumento7 páginasWind Turbine Technical DescriptionBrendan CassidyAinda não há avaliações
- Wind Turbine Anchor SolutionsDocumento8 páginasWind Turbine Anchor SolutionsplatanospanosAinda não há avaliações
- Mechanical Behavior of Materials - Lecture Slides - Chapter 9Documento73 páginasMechanical Behavior of Materials - Lecture Slides - Chapter 9Jun-Dong LeeAinda não há avaliações
- Design Course For Wind Energy Systems SlidesDocumento231 páginasDesign Course For Wind Energy Systems SlidesKhaled BellegdyAinda não há avaliações
- Reinforced Concrete Bridges PDFDocumento2 páginasReinforced Concrete Bridges PDFSubash MallampalliAinda não há avaliações
- Addis Ababa University Hydro Power Engineering LectureDocumento35 páginasAddis Ababa University Hydro Power Engineering LectureSentex HabashaAinda não há avaliações
- Day2 2 PINKS PDFDocumento30 páginasDay2 2 PINKS PDFPeng TerAinda não há avaliações
- Introduction To TurbineDocumento132 páginasIntroduction To TurbineZuLfiqar Ali100% (1)
- FINALDocumento56 páginasFINALanish3189Ainda não há avaliações
- SN-1-Jul-2013 Aero-Dyn SWE Aeroelastic Simulation With ADCoSDocumento3 páginasSN-1-Jul-2013 Aero-Dyn SWE Aeroelastic Simulation With ADCoSrrAinda não há avaliações
- Monitoring Critical Applications at SeaDocumento3 páginasMonitoring Critical Applications at SeaMohamed AliAinda não há avaliações
- Omc 2015 Exhibitors' ListDocumento15 páginasOmc 2015 Exhibitors' ListanteoprivatoAinda não há avaliações
- Wind Turbine Drivetrain Technology and Cost Drivers: DR John Coultate R&D and Consultancy Dept. LeaderDocumento29 páginasWind Turbine Drivetrain Technology and Cost Drivers: DR John Coultate R&D and Consultancy Dept. LeaderanteoprivatoAinda não há avaliações
- Investigation of Various Wind Turbine Drive Train Condition Monitoring Techniques S.Documento13 páginasInvestigation of Various Wind Turbine Drive Train Condition Monitoring Techniques S.anteoprivatoAinda não há avaliações
- Drivetrain Conditions MonitoringDocumento21 páginasDrivetrain Conditions MonitoringanteoprivatoAinda não há avaliações
- Wind Turbine Drivetrain Condition Monitoring - An: S. Sheng and P. VeersDocumento21 páginasWind Turbine Drivetrain Condition Monitoring - An: S. Sheng and P. VeersanteoprivatoAinda não há avaliações
- LT4536 TT Aerospace Surface Preparation Guide-2ndDocumento11 páginasLT4536 TT Aerospace Surface Preparation Guide-2ndRandal OhlgartAinda não há avaliações
- Fatigue Analysis of Powertrain PDFDocumento6 páginasFatigue Analysis of Powertrain PDFanteoprivatoAinda não há avaliações
- European offshore wind industry report H1 2016Documento19 páginasEuropean offshore wind industry report H1 2016anteoprivatoAinda não há avaliações
- Handbook of Practical Gear DesignDocumento7 páginasHandbook of Practical Gear DesignPooria1989Ainda não há avaliações
- COLUMN DESIGN REPORTDocumento13 páginasCOLUMN DESIGN REPORTdongshengAinda não há avaliações
- Chemical Engg. 3rd SemDocumento3 páginasChemical Engg. 3rd SemAVERAGEAinda não há avaliações
- 4.DB Flats (1-7) & SMDB TypicalDocumento9 páginas4.DB Flats (1-7) & SMDB TypicalhpzenAinda não há avaliações
- Axial flow fan guideDocumento2 páginasAxial flow fan guideThanhAinda não há avaliações
- 1009 - Wind Loads On Duopitch Roof Building: DescriptionDocumento7 páginas1009 - Wind Loads On Duopitch Roof Building: DescriptionKris Lee100% (1)
- Production and Industrial EngineeringDocumento27 páginasProduction and Industrial EngineeringShivangi MishraAinda não há avaliações
- O&Msec3 CFB Boiler OperationDocumento55 páginasO&Msec3 CFB Boiler Operationbagus efendiAinda não há avaliações
- Memoria Muro Mamposteria Escalera QuickMasonryDocumento7 páginasMemoria Muro Mamposteria Escalera QuickMasonryJulio Marcial Ramos QuinteroAinda não há avaliações
- Hazard and Operability Analysis (HAZOP) of A Plastic Manufacturing Plant at Karachi, PakistanDocumento7 páginasHazard and Operability Analysis (HAZOP) of A Plastic Manufacturing Plant at Karachi, PakistanFaisal AkhterAinda não há avaliações
- 5 Steps To A 5 AP Physics C 2017 - McGraw-HillDocumento299 páginas5 Steps To A 5 AP Physics C 2017 - McGraw-HillRishit Kalra100% (1)
- Pegasus EX 3200-5200 Parts ListDocumento120 páginasPegasus EX 3200-5200 Parts ListJanos KornfeldAinda não há avaliações
- DIB - Generators & MotorsDocumento6 páginasDIB - Generators & MotorsDeepen SharmaAinda não há avaliações
- 1104D-E44T and 1104D-E44TA Industrial Engine Electrical SystemDocumento2 páginas1104D-E44T and 1104D-E44TA Industrial Engine Electrical SystemGerman E.100% (1)
- Design of Drag-Link Mechanisms With Optimum Transmission AngleDocumento5 páginasDesign of Drag-Link Mechanisms With Optimum Transmission AngleNigussie AdemAinda não há avaliações
- Taller Física Eléctrica MULTIPLE CHOICE. Choose The One Alternative That Best Completes The Statement or Answers The QuestionDocumento3 páginasTaller Física Eléctrica MULTIPLE CHOICE. Choose The One Alternative That Best Completes The Statement or Answers The QuestionSergio Cuellar0% (1)
- RLT Richtlinie01 AHU Guideline01Documento24 páginasRLT Richtlinie01 AHU Guideline01cmlad1Ainda não há avaliações
- XtraVac Multihead Packaging Lines-LRDocumento5 páginasXtraVac Multihead Packaging Lines-LRMohammad SalamaAinda não há avaliações
- Lunaire CE0932W 3 ManualDocumento47 páginasLunaire CE0932W 3 ManualDanAinda não há avaliações
- AB Die Casting EngDocumento24 páginasAB Die Casting Engkaniappan sakthivelAinda não há avaliações
- Project Cover Sheet and Drawing List for MAN Engine CraneDocumento16 páginasProject Cover Sheet and Drawing List for MAN Engine CraneYuseriAinda não há avaliações
- PTI AnchorageDocumento18 páginasPTI AnchorageMG Kim100% (1)
- RoofBolter - Technical Specification-FinalDocumento5 páginasRoofBolter - Technical Specification-FinalSushantAinda não há avaliações
- High-Temperature High-Strength Nickel-Base Alloys: A Practical Guide To The Use of Nickel-Containing Alloys N 393Documento86 páginasHigh-Temperature High-Strength Nickel-Base Alloys: A Practical Guide To The Use of Nickel-Containing Alloys N 393DNH RND - VijaykumarAinda não há avaliações
- Cutlas Motor ReparaciónDocumento24 páginasCutlas Motor ReparaciónfeaaAinda não há avaliações
- Thermal Relief Valves: From The Automation List Department..Documento1 páginaThermal Relief Valves: From The Automation List Department..Sofyan HadiAinda não há avaliações
- FAGOR Innovation 8kgDocumento22 páginasFAGOR Innovation 8kgmenloparckAinda não há avaliações
- MT 2010Documento8 páginasMT 2010kokonunezAinda não há avaliações
- Body Builders Guide PDFDocumento216 páginasBody Builders Guide PDFvo phuongAinda não há avaliações
- MIE100H1 - 20195 - 631572298320MIE 100 CheatsheetDocumento2 páginasMIE100H1 - 20195 - 631572298320MIE 100 CheatsheetSCR PpelusaAinda não há avaliações