Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5795)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Knee JointDocumento28 páginasKnee JointRaj Shekhar Singh100% (1)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Axera D06Documento2 páginasAxera D06Cristián Fernando Cristóbal RoblesAinda não há avaliações
- Cyclic MeditationDocumento8 páginasCyclic MeditationSatadal GuptaAinda não há avaliações
- Union Test Prep Nclex Study GuideDocumento115 páginasUnion Test Prep Nclex Study GuideBradburn Nursing100% (2)
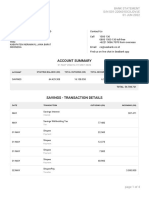
- Seabank Statement 20220726Documento4 páginasSeabank Statement 20220726Alesa WahabappAinda não há avaliações
- Maths Ques. 1Documento2 páginasMaths Ques. 1sagrvAinda não há avaliações
- List of Airports in IndiaDocumento10 páginasList of Airports in IndiasagrvAinda não há avaliações
- CATDocumento27 páginasCATsagrvAinda não há avaliações
- Monthly Current Affairs and GK Capsule July 2018 - Download in PDFDocumento47 páginasMonthly Current Affairs and GK Capsule July 2018 - Download in PDFsagrvAinda não há avaliações
- Reserve Bank of India: Current Affairs and Latest CircularsDocumento6 páginasReserve Bank of India: Current Affairs and Latest CircularssagrvAinda não há avaliações
- Design and Implementation of Two Phase I PDFDocumento6 páginasDesign and Implementation of Two Phase I PDFsagrvAinda não há avaliações
- Competitive Exams: Statistics BasicsDocumento6 páginasCompetitive Exams: Statistics BasicssagrvAinda não há avaliações
- Quiz-1 (2017)Documento1 páginaQuiz-1 (2017)sagrvAinda não há avaliações
- EED364: Grpah Signal Processing: ObjectiveDocumento10 páginasEED364: Grpah Signal Processing: ObjectivesagrvAinda não há avaliações
- Assignment #4: SolutionsDocumento6 páginasAssignment #4: SolutionssagrvAinda não há avaliações
- All All: For If Else End EndDocumento3 páginasAll All: For If Else End EndsagrvAinda não há avaliações
- HW1 SolutionsDocumento6 páginasHW1 SolutionssagrvAinda não há avaliações
- Syllabus For MAT 280 - Numerical Analysis IDocumento1 páginaSyllabus For MAT 280 - Numerical Analysis IsagrvAinda não há avaliações
- DC Compound Generator LoadtestDocumento4 páginasDC Compound Generator LoadtestsagrvAinda não há avaliações
- Assignment 1 EED203Documento3 páginasAssignment 1 EED203sagrvAinda não há avaliações
- Ds Project ReportDocumento9 páginasDs Project ReportsagrvAinda não há avaliações
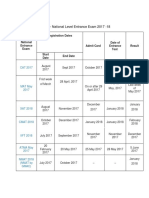
- MBA Exam Calendar - National Level Entrance Exam 2017 - 18Documento2 páginasMBA Exam Calendar - National Level Entrance Exam 2017 - 18sagrvAinda não há avaliações
- Institute of Telecom Technology and ManagementDocumento2 páginasInstitute of Telecom Technology and ManagementsagrvAinda não há avaliações
- Odisha State Museum-1Documento26 páginasOdisha State Museum-1ajitkpatnaikAinda não há avaliações
- Computers in Industry: Hugh Boyes, Bil Hallaq, Joe Cunningham, Tim Watson TDocumento12 páginasComputers in Industry: Hugh Boyes, Bil Hallaq, Joe Cunningham, Tim Watson TNawabMasidAinda não há avaliações
- List of Some Common Surgical TermsDocumento5 páginasList of Some Common Surgical TermsShakil MahmodAinda não há avaliações
- PP Master Data Version 002Documento34 páginasPP Master Data Version 002pranitAinda não há avaliações
- (Campus of Open Learning) University of Delhi Delhi-110007Documento1 página(Campus of Open Learning) University of Delhi Delhi-110007Sahil Singh RanaAinda não há avaliações
- 1 Bacterial DeseaseDocumento108 páginas1 Bacterial DeseasechachaAinda não há avaliações
- Syllabus: What Is Artificial Intelligence? ProblemsDocumento66 páginasSyllabus: What Is Artificial Intelligence? ProblemsUdupiSri groupAinda não há avaliações
- Analytical Chem Lab #3Documento4 páginasAnalytical Chem Lab #3kent galangAinda não há avaliações
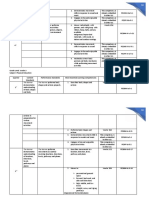
- PE MELCs Grade 3Documento4 páginasPE MELCs Grade 3MARISSA BERNALDOAinda não há avaliações
- Organization Culture Impacts On Employee Motivation: A Case Study On An Apparel Company in Sri LankaDocumento4 páginasOrganization Culture Impacts On Employee Motivation: A Case Study On An Apparel Company in Sri LankaSupreet PurohitAinda não há avaliações
- Virtual Assets Act, 2022Documento18 páginasVirtual Assets Act, 2022Rapulu UdohAinda não há avaliações
- Manual For Tacho Universal Edition 2006: Legal DisclaimerDocumento9 páginasManual For Tacho Universal Edition 2006: Legal DisclaimerboirxAinda não há avaliações
- Previous Year Questions - Macro Economics - XIIDocumento16 páginasPrevious Year Questions - Macro Economics - XIIRituraj VermaAinda não há avaliações
- Advertising II Marathi VersionDocumento91 páginasAdvertising II Marathi VersionHarsh Sangani100% (1)
- School Based INSET Interim EvaluationDocumento8 páginasSchool Based INSET Interim Evaluationprinces arcangelAinda não há avaliações
- Water Pump 250 Hrs Service No Unit: Date: HM: ShiftDocumento8 páginasWater Pump 250 Hrs Service No Unit: Date: HM: ShiftTLK ChannelAinda não há avaliações
- Product NDC # Compare To Strength Size Form Case Pack Abcoe# Cardinal Cin # Mckesson Oe # M&Doe#Documento14 páginasProduct NDC # Compare To Strength Size Form Case Pack Abcoe# Cardinal Cin # Mckesson Oe # M&Doe#Paras ShardaAinda não há avaliações
- Walking in Space - Lyrics and Chord PatternDocumento2 páginasWalking in Space - Lyrics and Chord Patternjohn smithAinda não há avaliações
- Acc116 Dec 2022 - Q - Test 1Documento6 páginasAcc116 Dec 2022 - Q - Test 12022825274100% (1)
- Surgery - 2020 With CorrectionDocumento70 páginasSurgery - 2020 With CorrectionBaraa KassisAinda não há avaliações
- Contoh Discussion Text Tentang HomeworkDocumento8 páginasContoh Discussion Text Tentang Homeworkg3p35rs6100% (1)
- IcarosDesktop ManualDocumento151 páginasIcarosDesktop ManualAsztal TavoliAinda não há avaliações
- Draft PDFDocumento166 páginasDraft PDFashwaq000111Ainda não há avaliações
- Soil NailingDocumento6 páginasSoil Nailingvinodreddy146Ainda não há avaliações
- Comparative Study Between Online and Offilne Learning With Reference of Tutedude E-LearningDocumento61 páginasComparative Study Between Online and Offilne Learning With Reference of Tutedude E-LearningDeeksha Saxena0% (2)