Você também pode gostar
- Statics: ES 113 Mr. MoadiDocumento49 páginasStatics: ES 113 Mr. MoadiDerrick Maatla MoadiAinda não há avaliações
- Engg. MechanicsDocumento29 páginasEngg. MechanicsSunand Pongurlekar100% (1)
- Engineering Statics: Quaid-e-Azam College of Engineering & TechnologyDocumento19 páginasEngineering Statics: Quaid-e-Azam College of Engineering & TechnologywaseemjuttAinda não há avaliações
- Basic Mechanics PrinciplesDocumento89 páginasBasic Mechanics PrinciplesMatthew Lawrence CorderoAinda não há avaliações
- Engineering Mechanics I To III Units PDFDocumento143 páginasEngineering Mechanics I To III Units PDFAnil KumarAinda não há avaliações
- Force System and ResultantDocumento20 páginasForce System and ResultantMyra GarciaAinda não há avaliações
- Chaper 2 Definition Classification Force SEDocumento8 páginasChaper 2 Definition Classification Force SEMaan Valencia - RevillaAinda não há avaliações
- Engineering Mechanics Module 1Documento38 páginasEngineering Mechanics Module 1jzeke senseiAinda não há avaliações
- Des-Con 01 Basics of Strength of Material - Weld DesignDocumento62 páginasDes-Con 01 Basics of Strength of Material - Weld DesignK JeevanAinda não há avaliações
- CHP 2 - Force SystemDocumento15 páginasCHP 2 - Force SystemSagheer AhmedAinda não há avaliações
- Unit-1 FMEDocumento59 páginasUnit-1 FMEAshish KhariAinda não há avaliações
- Engineering Statics: Quaid-e-Azam College of Engineering & TechnologyDocumento19 páginasEngineering Statics: Quaid-e-Azam College of Engineering & TechnologyaliAinda não há avaliações
- 6-Moments Couples and Force Couple SystemsDocumento69 páginas6-Moments Couples and Force Couple SystemsJamal JalalaniAinda não há avaliações
- Part1 EmotionDocumento46 páginasPart1 EmotionhohoAinda não há avaliações
- Bridge Course 22-23 EMDocumento12 páginasBridge Course 22-23 EMAmar BhopiAinda não há avaliações
- Rigid bodies and vector quantitiesDocumento11 páginasRigid bodies and vector quantitiesمنتظر محمدAinda não há avaliações
- Cie 136Documento151 páginasCie 136Sancho BilogAinda não há avaliações
- Unit IDocumento10 páginasUnit ISri RAinda não há avaliações
- Es223 1Documento13 páginasEs223 1Niño DeGraciaAinda não há avaliações
- Ceg Lab 202Documento73 páginasCeg Lab 202Peace AdetunmibiAinda não há avaliações
- 2 - Laws of ForcesDocumento17 páginas2 - Laws of ForcesAmarjeet Singh (Assistant Professor- Mechanical Engineer)Ainda não há avaliações
- Statics 1Documento38 páginasStatics 1josua jamesAinda não há avaliações
- Lecture .1Documento154 páginasLecture .1Khalid YousafAinda não há avaliações
- Basic Operations With Force Systems (Short)Documento40 páginasBasic Operations With Force Systems (Short)Kirk JamisonAinda não há avaliações
- ch.2forcemomentcoupleDocumento40 páginasch.2forcemomentcoupledamasAinda não há avaliações
- Rigid Bodies Beam Lecture NoteDocumento30 páginasRigid Bodies Beam Lecture NoteSharanya SrinivasanAinda não há avaliações
- Lecture 2 (Chapter 2)Documento22 páginasLecture 2 (Chapter 2)Adam SurtiAinda não há avaliações
- Ge8292: Engineering MechanicsDocumento13 páginasGe8292: Engineering MechanicsPradeep KumarAinda não há avaliações
- Equilibrium of Force SystemDocumento129 páginasEquilibrium of Force Systemnirvan93100% (1)
- Smith & Burstone-Mechanic Tooth MovementDocumento14 páginasSmith & Burstone-Mechanic Tooth MovementGisselaMaldonadoAinda não há avaliações
- Unit No.1-Force (2) - 1Documento11 páginasUnit No.1-Force (2) - 1Mrunali SurwadeAinda não há avaliações
- Module 1 - Introduction To Mechanics of Deformable BodiesDocumento11 páginasModule 1 - Introduction To Mechanics of Deformable BodiesKobeAinda não há avaliações
- EM Unit Wise PDFDocumento32 páginasEM Unit Wise PDFRamuVasaAinda não há avaliações
- ENGINEERING MECHANICS FUNDAMENTALSDocumento57 páginasENGINEERING MECHANICS FUNDAMENTALSRandomAinda não há avaliações
- Statics: Forces Acting at A PointDocumento16 páginasStatics: Forces Acting at A Pointapi-27085921Ainda não há avaliações
- Equilibrium: This Module Aims That The Students Will Be Able ToDocumento12 páginasEquilibrium: This Module Aims That The Students Will Be Able ToMonique UnicoAinda não há avaliações
- Chapter 2Documento37 páginasChapter 2Yordanos AbebawAinda não há avaliações
- Stress 2 Strain 3 Torsion 4 Shear Diagram and Bending Moment 5 Stresses in Beams 6 Deflection in Beam 7 Combined Stresses 9 ColumnsDocumento14 páginasStress 2 Strain 3 Torsion 4 Shear Diagram and Bending Moment 5 Stresses in Beams 6 Deflection in Beam 7 Combined Stresses 9 ColumnsAlitA TubeAinda não há avaliações
- Stress and Strain ConceptsDocumento9 páginasStress and Strain ConceptsreddyprasadAinda não há avaliações
- Chapter 4-Equilibrium of Rigid BodiesDocumento3 páginasChapter 4-Equilibrium of Rigid BodiesEllaMariePaceteAinda não há avaliações
- Couple (Mechanics) - WikipediaDocumento3 páginasCouple (Mechanics) - Wikipediastallone21Ainda não há avaliações
- Ajodo 1984 Mechanics of Tooth MovementDocumento14 páginasAjodo 1984 Mechanics of Tooth MovementFiorella Loli PintoAinda não há avaliações
- Introduction to Statics and ForcesDocumento17 páginasIntroduction to Statics and ForcesIan Arnold FamiAinda não há avaliações
- Des-Con 01 Basics of Strength of Material - Weld DesignDocumento62 páginasDes-Con 01 Basics of Strength of Material - Weld DesignRaghu vamshiAinda não há avaliações
- Chapter 1 - Shear Forces and Bending MomentsDocumento27 páginasChapter 1 - Shear Forces and Bending Momentslinus 24kAinda não há avaliações
- 2 MARKS MOM With AnswersDocumento14 páginas2 MARKS MOM With Answersjeroldscd100% (1)
- Static and Strength of MaterialsDocumento180 páginasStatic and Strength of MaterialsYassin AmrirAinda não há avaliações
- Lecture Notes 2 - Introduction To Statics of Rigid BodiesDocumento3 páginasLecture Notes 2 - Introduction To Statics of Rigid BodiesMark Recar AntequisaAinda não há avaliações
- Esm Unit 2Documento25 páginasEsm Unit 2deekshithasweety0Ainda não há avaliações
- Stat For Rigid BodiesDocumento7 páginasStat For Rigid BodiesKean LonggayAinda não há avaliações
- Elements of A MomentDocumento12 páginasElements of A MomentcrotoaslutAinda não há avaliações
- ES 122 NotesDocumento4 páginasES 122 NotesronieAinda não há avaliações
- Statics Lecture 2Documento3 páginasStatics Lecture 2johnandry.tutorAinda não há avaliações
- CE 234A Mechanics of Deformable BodiesDocumento67 páginasCE 234A Mechanics of Deformable BodiesMyzza S. SappayaniAinda não há avaliações
- Unit 1 - Two Mark Questions With Answers Oct 23Documento4 páginasUnit 1 - Two Mark Questions With Answers Oct 23mk24inAinda não há avaliações
- SELVAM COLLEGE STRENGTH OF MATERIALSDocumento14 páginasSELVAM COLLEGE STRENGTH OF MATERIALSSelvaraj GAinda não há avaliações
- Bodies or Fluids That Are at Rest or in Motions.: DynamicsDocumento23 páginasBodies or Fluids That Are at Rest or in Motions.: DynamicsJames MichaelAinda não há avaliações
- Domunitinotes 180418054128 PDFDocumento101 páginasDomunitinotes 180418054128 PDFsuneel kumar rathoreAinda não há avaliações
- Physical Chemistry With Formulas and Examples: August 2014Documento6 páginasPhysical Chemistry With Formulas and Examples: August 2014koustav mahataAinda não há avaliações
- ChitinDocumento6 páginasChitinAmiel DionisioAinda não há avaliações
- CHE 525 Renewable Energy Technologies: BiofuelsDocumento49 páginasCHE 525 Renewable Energy Technologies: BiofuelsAmiel DionisioAinda não há avaliações
- Principles of Statics ExplainedDocumento5 páginasPrinciples of Statics ExplainedAmiel DionisioAinda não há avaliações
- Laboratory scale production of glucose syrup from maize, millet and sorghum starchDocumento8 páginasLaboratory scale production of glucose syrup from maize, millet and sorghum starchRizqa FauziyahAinda não há avaliações
- Instrumentation and Process Control: Pamantasan NG Lungsod NG MaynilaDocumento52 páginasInstrumentation and Process Control: Pamantasan NG Lungsod NG MaynilaAmiel DionisioAinda não há avaliações
- Vacuum Distillation and FlowchartDocumento2 páginasVacuum Distillation and FlowchartAmiel DionisioAinda não há avaliações
- Catalytic Conversion of Glycerol to EpichlorohydrinDocumento5 páginasCatalytic Conversion of Glycerol to EpichlorohydrinAmiel DionisioAinda não há avaliações
- Wwproj 226 12.08amDocumento47 páginasWwproj 226 12.08amAmiel DionisioAinda não há avaliações
- Yng Mga Extra Sa Marketing ProgramDocumento7 páginasYng Mga Extra Sa Marketing ProgramAmiel DionisioAinda não há avaliações
- Experimental Study: Pamantasan NG Lungsod NG MaynilaDocumento113 páginasExperimental Study: Pamantasan NG Lungsod NG MaynilaAmiel DionisioAinda não há avaliações
- EthicsDocumento1 páginaEthicsAmiel DionisioAinda não há avaliações
- Journal 4Documento3 páginasJournal 4Amiel DionisioAinda não há avaliações
- CHE 424 PROCESS DYNAMICS AND CONTROL RESEARCH EXPERIMENT (TEMPERATUREDocumento22 páginasCHE 424 PROCESS DYNAMICS AND CONTROL RESEARCH EXPERIMENT (TEMPERATUREAmiel DionisioAinda não há avaliações
- Stoichiometry of Microbial Growth and Product FormationDocumento16 páginasStoichiometry of Microbial Growth and Product FormationAmiel DionisioAinda não há avaliações
- Elements of ContractsDocumento12 páginasElements of ContractsAmiel DionisioAinda não há avaliações
- CHE 424 PROCESS DYNAMICS AND CONTROL RESEARCH EXPERIMENT (TEMPERATUREDocumento22 páginasCHE 424 PROCESS DYNAMICS AND CONTROL RESEARCH EXPERIMENT (TEMPERATUREAmiel DionisioAinda não há avaliações
- Estimation of Glucose Concentration PDFDocumento3 páginasEstimation of Glucose Concentration PDFAmiel DionisioAinda não há avaliações
- Designing Aluminum CansDocumento7 páginasDesigning Aluminum CansAmiel Dionisio100% (1)
- Queueing TheoryDocumento11 páginasQueueing TheoryAmiel DionisioAinda não há avaliações
- Water Treatment in GeneralDocumento32 páginasWater Treatment in GeneralAmiel DionisioAinda não há avaliações
- Pamantasan NG Lungsod NG Maynila College of Engineering and Technology Department of Chemical EngineeringDocumento18 páginasPamantasan NG Lungsod NG Maynila College of Engineering and Technology Department of Chemical EngineeringAmiel DionisioAinda não há avaliações
- Company PersonnelDocumento1 páginaCompany PersonnelAmiel DionisioAinda não há avaliações
- Wastewater Disinfection: Selecting A Disinfection AlternativeDocumento11 páginasWastewater Disinfection: Selecting A Disinfection AlternativeAmiel DionisioAinda não há avaliações
- Bare and Lagged PipesDocumento21 páginasBare and Lagged PipesAmiel DionisioAinda não há avaliações
- Water Quality Standards SummaryDocumento76 páginasWater Quality Standards SummaryAmiel DionisioAinda não há avaliações
- University of The City of Manila: Pamantasan NG Lungsod NG MaynilaDocumento7 páginasUniversity of The City of Manila: Pamantasan NG Lungsod NG MaynilaAmiel DionisioAinda não há avaliações
- PIPINGDocumento65 páginasPIPINGAmiel DionisioAinda não há avaliações
- Objectives of The Study: Pamantasan NG Lungsod NG MaynilaDocumento2 páginasObjectives of The Study: Pamantasan NG Lungsod NG MaynilaAmiel DionisioAinda não há avaliações
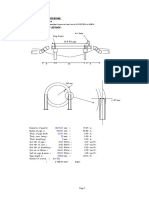
- RING GIRDER CROSSING DESIGNDocumento7 páginasRING GIRDER CROSSING DESIGNAh Leng LauAinda não há avaliações
- Caso RoturaDocumento200 páginasCaso RoturaImeblaAinda não há avaliações
- Misurata UniversityDocumento11 páginasMisurata UniversityDustin EllisAinda não há avaliações
- Chaudhry 2008Documento12 páginasChaudhry 2008filipecorsairAinda não há avaliações
- Optimal Reinforced Concrete Wall DesignDocumento7 páginasOptimal Reinforced Concrete Wall DesignPrsAinda não há avaliações
- Momrevsol PDFDocumento2 páginasMomrevsol PDFRACS ECETAinda não há avaliações
- DESIGN OF INTERNEDIATUFLIGHT BEAMDocumento71 páginasDESIGN OF INTERNEDIATUFLIGHT BEAMSajal9474Ainda não há avaliações
- Design Guide Eurocode Midas Civil - 2nd Edition PDFDocumento200 páginasDesign Guide Eurocode Midas Civil - 2nd Edition PDFAshish LoyaAinda não há avaliações
- ED Series 166 80kmh PDFDocumento58 páginasED Series 166 80kmh PDFrezaAinda não há avaliações
- Explanatory Examples On Indian Seismic Code IS 1893 (Part I)Documento10 páginasExplanatory Examples On Indian Seismic Code IS 1893 (Part I)shadabg04Ainda não há avaliações
- Earth Science: Faulting and FoldingDocumento27 páginasEarth Science: Faulting and FoldingCloverLine HeartAinda não há avaliações
- 4 - Longitudinal Response of Buried Pipeline Under Non-Uniform Seismic Excitation From Multi-Point Shaking Table TestsDocumento15 páginas4 - Longitudinal Response of Buried Pipeline Under Non-Uniform Seismic Excitation From Multi-Point Shaking Table TestsIsabella DuarteAinda não há avaliações
- Technical Datasheet 2100TN00: 1) Product DescriptionDocumento1 páginaTechnical Datasheet 2100TN00: 1) Product DescriptionjavadmohammadiAinda não há avaliações
- Double TorsionDocumento49 páginasDouble TorsionAnonymous mv84nhzAinda não há avaliações
- Lab 4 - Torsion TestDocumento16 páginasLab 4 - Torsion TestThaneswaran BaluAinda não há avaliações
- Method of SlicesDocumento2 páginasMethod of SlicesYash Raj GairaAinda não há avaliações
- Two-Dimensional Elasticity Solution of a Functionally Graded BeamDocumento36 páginasTwo-Dimensional Elasticity Solution of a Functionally Graded BeamyashAinda não há avaliações
- En1992 2 ManualDocumento86 páginasEn1992 2 ManualMarian Dragos100% (1)
- CE5509 Quiz 1 Common MistakesDocumento7 páginasCE5509 Quiz 1 Common MistakesSteven KuaAinda não há avaliações
- Elastic Constants KetulDocumento21 páginasElastic Constants KetulRambabu Vurimi67% (3)
- Physics Class 11 Cbse CH 8 Mechanical Properties of Solids Important Questions 2024Documento5 páginasPhysics Class 11 Cbse CH 8 Mechanical Properties of Solids Important Questions 2024anandsingh811599Ainda não há avaliações
- Material Approval Reinforcing Bar - SampleDocumento19 páginasMaterial Approval Reinforcing Bar - SampleAhmad ZulyansyahAinda não há avaliações
- Ha6894 PDFDocumento108 páginasHa6894 PDFEvaAinda não há avaliações
- MDB Assestment 1 PDFDocumento3 páginasMDB Assestment 1 PDFClarence Jay AcaylarAinda não há avaliações
- Beam Static Study-Static 1-1Documento10 páginasBeam Static Study-Static 1-1phitahnAinda não há avaliações
- FEMFAT Version News: Christian Gaier April 2011Documento36 páginasFEMFAT Version News: Christian Gaier April 2011Paris Adrián100% (1)
- Preliminary Report On Tall BuildingDocumento15 páginasPreliminary Report On Tall BuildingG V krishnaAinda não há avaliações
- Section 15: Steel Tunnel Liner PlatesDocumento4 páginasSection 15: Steel Tunnel Liner PlatesSyed Rizwan SaleemAinda não há avaliações
- 2009-11-06 Boardwalk Partners Update W Test Results Search AbleDocumento126 páginas2009-11-06 Boardwalk Partners Update W Test Results Search AblepalblackburnAinda não há avaliações
- Retaining Wall NoteDocumento21 páginasRetaining Wall NoteMekonen Magoga100% (1)