Você também pode gostar
- Samri MSc. Thesis FinalDocumento125 páginasSamri MSc. Thesis FinalMinilik Tikur SewAinda não há avaliações
- A Study On Steel Fiber Reinforced Normal PDFDocumento5 páginasA Study On Steel Fiber Reinforced Normal PDFZindagiDeeAinda não há avaliações
- Circular OrificeDocumento20 páginasCircular OrificeAsanka Jayasinghe100% (1)
- Reaction PaperDocumento4 páginasReaction PaperKaizer Khamomill T. MacatiagAinda não há avaliações
- CHAPTER 1-2 Editted March 25, 2015Documento40 páginasCHAPTER 1-2 Editted March 25, 2015leepatrickbanezAinda não há avaliações
- Thesis ManuscriptDocumento177 páginasThesis ManuscriptMaevin WooAinda não há avaliações
- Celebrating Literacy in the Rwenzori Region: Lest We Forget: a Biographical Narrative of Uganda’S Youngest Member of Parliament, 1980-1985No EverandCelebrating Literacy in the Rwenzori Region: Lest We Forget: a Biographical Narrative of Uganda’S Youngest Member of Parliament, 1980-1985Ainda não há avaliações
- Equivalent Moment Factor C1Documento2 páginasEquivalent Moment Factor C1baharfka7423Ainda não há avaliações
- Safety Management - Module1Documento28 páginasSafety Management - Module1Atienza ArjayAinda não há avaliações
- 2l Steel Section Tables 080307Documento10 páginas2l Steel Section Tables 080307Takeshi Huamani ChaupinAinda não há avaliações
- CE516 - Charging For Civil Engineering ServicesDocumento8 páginasCE516 - Charging For Civil Engineering ServicesNicholas Bonn SingAinda não há avaliações
- 13 Modelling A Geofoam Embankment Behind Bridge Abutment Using Midas SoilworksDocumento7 páginas13 Modelling A Geofoam Embankment Behind Bridge Abutment Using Midas SoilworksH.A.I Công tyAinda não há avaliações
- CE100 CE Orientation - SyllabusDocumento6 páginasCE100 CE Orientation - SyllabusSweetie CagangAinda não há avaliações
- Final Thesis - With AppendicesDocumento103 páginasFinal Thesis - With AppendicesAzkalzstriker Den100% (1)
- Seismic Isolator and Their TypesDocumento6 páginasSeismic Isolator and Their TypesHasan Asy' AryAinda não há avaliações
- Application of Multilinear Regression Analysis in Modeling of Soil Properties For Geotechnical Civil Engineering Works in Calabar SouthDocumento7 páginasApplication of Multilinear Regression Analysis in Modeling of Soil Properties For Geotechnical Civil Engineering Works in Calabar SouthMasood AhmedAinda não há avaliações
- 226 - Shaking Table Testing of A Steel Framce Structure...Documento9 páginas226 - Shaking Table Testing of A Steel Framce Structure...Ing Jaime Espinoza SkinfieldAinda não há avaliações
- Reinforced Concrete FootingsDocumento13 páginasReinforced Concrete FootingsMike MatshonaAinda não há avaliações
- CE 470-Lect-3 (Analysis of Biaxially Loaded Columns) (Read-Only)Documento22 páginasCE 470-Lect-3 (Analysis of Biaxially Loaded Columns) (Read-Only)Jamal RkhAinda não há avaliações
- 01-Experiment 1 - Behavior of Reinforced Concrete Beams Under FlexureDocumento5 páginas01-Experiment 1 - Behavior of Reinforced Concrete Beams Under FlexureRavi ShankarAinda não há avaliações
- Ecohydrology: Vegetation Function, Water and Resource ManagementNo EverandEcohydrology: Vegetation Function, Water and Resource ManagementAinda não há avaliações
- Earthquake Protection of Buildings by Seismic Isolation. Devices and ConceptsDocumento9 páginasEarthquake Protection of Buildings by Seismic Isolation. Devices and ConceptsMuhammed Mundhir PAinda não há avaliações
- Foundation Design - Insitu TestingDocumento22 páginasFoundation Design - Insitu TestingSnow YoshimaAinda não há avaliações
- ch-6 One Way SlabDocumento12 páginasch-6 One Way SlabameerAinda não há avaliações
- Analisis Struktur C6Documento47 páginasAnalisis Struktur C6Hazyema HarunAinda não há avaliações
- Experiment No: 3: Standard Test Method For Splitting Tensile Strength OF Cylindrical Concrete SpecimensDocumento3 páginasExperiment No: 3: Standard Test Method For Splitting Tensile Strength OF Cylindrical Concrete SpecimensMuhammad WaqarAinda não há avaliações
- Asnake KefelegnDocumento70 páginasAsnake KefelegnabadittadesseAinda não há avaliações
- Construction Management FundamentalsDocumento20 páginasConstruction Management FundamentalsAlbader .MAinda não há avaliações
- Characterization and Viability of Clay Soils From Metro Manila As Lanfill Liners - Acebedo, PerdonDocumento5 páginasCharacterization and Viability of Clay Soils From Metro Manila As Lanfill Liners - Acebedo, PerdonRalph100% (2)
- Revised Curriculum Cea Civil - Engineering Sy. 2018 2019Documento16 páginasRevised Curriculum Cea Civil - Engineering Sy. 2018 2019Richard GomezAinda não há avaliações
- Imran Babatunde ProjectDocumento38 páginasImran Babatunde ProjectOpeyemi JamalAinda não há avaliações
- Technological Institute of The PhilippinesDocumento11 páginasTechnological Institute of The Philippinesalyssa babylaiAinda não há avaliações
- Comparative Analysis of Structure For Calamity by Using Midas Gen, ETABS and STAAD ProDocumento11 páginasComparative Analysis of Structure For Calamity by Using Midas Gen, ETABS and STAAD ProIJRASETPublicationsAinda não há avaliações
- 05 - 2020 A Smart Campus' Digital Twin For Sustainable Comfort MonitoringDocumento33 páginas05 - 2020 A Smart Campus' Digital Twin For Sustainable Comfort Monitoringamin mohAinda não há avaliações
- Thesis and Powerpoint Project of M.Tech Structural EngineeringDocumento83 páginasThesis and Powerpoint Project of M.Tech Structural EngineeringHanselAinda não há avaliações
- 1968 - Ultimate Strength Analysis of Prestressed Concrete Pressure Vessels - RASHIDDocumento11 páginas1968 - Ultimate Strength Analysis of Prestressed Concrete Pressure Vessels - RASHIDMarcos Alves da SilvaAinda não há avaliações
- Journal of The South African Institution of Civil EngineeringDocumento15 páginasJournal of The South African Institution of Civil Engineeringkranthi142434Ainda não há avaliações
- OSH Situation in The Global and Local LevelsDocumento11 páginasOSH Situation in The Global and Local LevelsLORENZ DAVE MACATANGAYAinda não há avaliações
- Civil Engineering (Structural Analysis) Compile By:Amjad BugtiDocumento11 páginasCivil Engineering (Structural Analysis) Compile By:Amjad Bugtimuhammed100% (1)
- Design and Analysis of Pedestrian Bridge: Mohammed - Yakub AliDocumento9 páginasDesign and Analysis of Pedestrian Bridge: Mohammed - Yakub AlisuprayitnoAinda não há avaliações
- Tunnel Rock Mechanics Presentation by T. Ramamurthy Iit DelhiDocumento76 páginasTunnel Rock Mechanics Presentation by T. Ramamurthy Iit DelhiS N satyanarayanaAinda não há avaliações
- Bridge 3Documento7 páginasBridge 3binanceAinda não há avaliações
- 14ENV212 Hydraulics - FINAL EXAMDocumento4 páginas14ENV212 Hydraulics - FINAL EXAMAslıhan KayaAinda não há avaliações
- Invitation To BidDocumento2 páginasInvitation To BidAma BanasihanAinda não há avaliações
- 23 Curved Steel Composite Design - MethodaDocumento11 páginas23 Curved Steel Composite Design - MethodaAAinda não há avaliações
- Intro 2nd EditionDocumento594 páginasIntro 2nd EditionDDIAinda não há avaliações
- RA544Documento30 páginasRA544Antonio Z MancheteAinda não há avaliações
- Lab 3 (Level 2) - Road and Building Setting OutDocumento3 páginasLab 3 (Level 2) - Road and Building Setting OutMohd Yusri100% (1)
- Progressive Collapse Analysis of Steel Braced FramesDocumento9 páginasProgressive Collapse Analysis of Steel Braced FrameswalaywanAinda não há avaliações
- Job Notification FormDocumento7 páginasJob Notification FormsriAinda não há avaliações
- CSE40419 - Ethics (Cases)Documento16 páginasCSE40419 - Ethics (Cases)Gabriel WongAinda não há avaliações
- RC-I Chapter 2 PDFDocumento36 páginasRC-I Chapter 2 PDFWendimu TolessaAinda não há avaliações
- CHAPTER-3 - RevDocumento5 páginasCHAPTER-3 - RevJaymark SorianoAinda não há avaliações
- Case StudyDocumento1 páginaCase StudyShahzaib Ahmad KhanAinda não há avaliações
- Prestressed Beam Analysis ExampleDocumento7 páginasPrestressed Beam Analysis ExampleHaymanAHMEDAinda não há avaliações
- Seismic Performance Evaluation of Multistoried RC Framed Buildings With Shear Wall PDFDocumento6 páginasSeismic Performance Evaluation of Multistoried RC Framed Buildings With Shear Wall PDFSahil OzaAinda não há avaliações
- Flow Through An OrificeDocumento8 páginasFlow Through An OrificeKevin VillaAinda não há avaliações
- Auckland Identification ToolboxDocumento8 páginasAuckland Identification ToolboxMKAinda não há avaliações
- Hybrid Physics-Based and Data-Driven PHM: H. Hanachi, W. Yu, I.Y. Kim and C.K. MechefskeDocumento13 páginasHybrid Physics-Based and Data-Driven PHM: H. Hanachi, W. Yu, I.Y. Kim and C.K. MechefskeSudipto RayAinda não há avaliações
- Previous Research: Et - Al and Zahra Mohebi, 2007)Documento3 páginasPrevious Research: Et - Al and Zahra Mohebi, 2007)MOHAMAD AFIQ ASHRAF AMRANAinda não há avaliações
- Description and Objectives: 24-786: Bayesian Machine LearningDocumento3 páginasDescription and Objectives: 24-786: Bayesian Machine LearningManoj Mohan BhatAinda não há avaliações
- Cluster ExamDocumento3 páginasCluster ExamAlexandre GumAinda não há avaliações
- Biostatistics (Hfs3283) Inferential StatisticsDocumento33 páginasBiostatistics (Hfs3283) Inferential StatisticsSwanky Devania AudiAinda não há avaliações
- Ebook Business Statistics For Contemporary Decision Making 9Th Edition Black Test Bank Full Chapter PDFDocumento54 páginasEbook Business Statistics For Contemporary Decision Making 9Th Edition Black Test Bank Full Chapter PDFreunitetuquekf100% (15)
- Testing of Hypotheses: BITS PilaniDocumento33 páginasTesting of Hypotheses: BITS PilaniJineet DesaiAinda não há avaliações
- Simple Linear RegressionDocumento8 páginasSimple Linear RegressionKathlen Mae MarollanoAinda não há avaliações
- Anushi Project-House Price PredictionDocumento26 páginasAnushi Project-House Price PredictionAnushi100% (1)
- Biografia de William Sealy GossetDocumento2 páginasBiografia de William Sealy GossetNicolas CarrascoAinda não há avaliações
- Skill Lab 1Documento7 páginasSkill Lab 1Dom TorettoAinda não há avaliações
- Gage R&RDocumento16 páginasGage R&RAl-Kawthari As-SunniAinda não há avaliações
- Least Square RegressionDocumento13 páginasLeast Square RegressionSamiullah QureshiAinda não há avaliações
- Math Biostatistics Boot Camp 1Documento3 páginasMath Biostatistics Boot Camp 1Jerry Taylor100% (1)
- Managerial StatisticsDocumento3 páginasManagerial StatisticsBereket KidaneAinda não há avaliações
- Statistical and Econometric Methods For Transportation Data AnalysisDocumento2 páginasStatistical and Econometric Methods For Transportation Data AnalysisNurul HandayaniAinda não há avaliações
- SPSS ResultsDocumento8 páginasSPSS ResultsShobhitKaptaAinda não há avaliações
- Errors in EpidemiologyDocumento13 páginasErrors in EpidemiologyDilshan Wickramanayaka0% (1)
- Stat 97Documento10 páginasStat 97Ahmed Kadem ArabAinda não há avaliações
- 04 Percntiles Deciles and QuartilesDocumento8 páginas04 Percntiles Deciles and QuartilesRodolfo HermoAinda não há avaliações
- M4 - Problem Set - Introduction To Statistics-2021 - LagiosDocumento12 páginasM4 - Problem Set - Introduction To Statistics-2021 - LagiosAmandeep SinghAinda não há avaliações
- Quantitative Macroeconomics Ardl Model: 100403596@alumnos - Uc3m.esDocumento10 páginasQuantitative Macroeconomics Ardl Model: 100403596@alumnos - Uc3m.esManuel FernandezAinda não há avaliações
- ODE Numerial AnalysisDocumento25 páginasODE Numerial Analysiscracking khalifAinda não há avaliações
- Correlation and Regression AnalysisDocumento23 páginasCorrelation and Regression AnalysispranayAinda não há avaliações
- C4-LP1 - Computing The Point Estimate of A Population MeanDocumento5 páginasC4-LP1 - Computing The Point Estimate of A Population Meanlor roaAinda não há avaliações
- Gumble DistributionDocumento24 páginasGumble DistributionNazakat HussainAinda não há avaliações
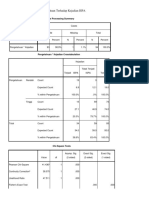
- Hasil Tabulasi Chi-Square Pengetahuan Terhadap Kejadian ISPADocumento6 páginasHasil Tabulasi Chi-Square Pengetahuan Terhadap Kejadian ISPALalu Rizki Andri SaputraAinda não há avaliações
- Time Series Practice HWDocumento3 páginasTime Series Practice HWLuisSanchezAinda não há avaliações
- MINITAB TrainingDocumento121 páginasMINITAB Trainingsriramc100% (6)
- STP 231Documento7 páginasSTP 231NamesAbelAinda não há avaliações
- Mod 3 Worksheet Review 14KEYDocumento5 páginasMod 3 Worksheet Review 14KEYAyman HalimeAinda não há avaliações
- WIN SEM (2020-21) CSE4029 ETH AP2020215000156 Reference Material I 27-Jan-2021 DistibutionDocumento7 páginasWIN SEM (2020-21) CSE4029 ETH AP2020215000156 Reference Material I 27-Jan-2021 DistibutionmaneeshmogallpuAinda não há avaliações