Você também pode gostar
- UWO Mechanical Components Design For Mechatronic Systems (MSE 3380) Sample Problems - Solutions v3Documento25 páginasUWO Mechanical Components Design For Mechatronic Systems (MSE 3380) Sample Problems - Solutions v3Fernando Freitas AlvesAinda não há avaliações
- Ashby How To Write A PaperDocumento47 páginasAshby How To Write A PaperGauri RanadiveAinda não há avaliações
- SAE Steel Grades (Wikipedia)Documento9 páginasSAE Steel Grades (Wikipedia)Fernando Freitas AlvesAinda não há avaliações
- Lista 03 (Aula 04) (Entregar) (English) PDFDocumento1 páginaLista 03 (Aula 04) (Entregar) (English) PDFFernando Freitas AlvesAinda não há avaliações
- Mechatronics - Pneumatic and Hydraulic Actuation SystemsDocumento8 páginasMechatronics - Pneumatic and Hydraulic Actuation SystemsFernando Freitas AlvesAinda não há avaliações
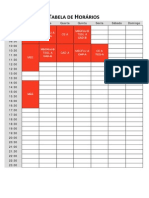
- Class Schedule and Timetable for the WeekDocumento1 páginaClass Schedule and Timetable for the WeekFernando Freitas AlvesAinda não há avaliações
- Structure and Function of Complex NetworksDocumento58 páginasStructure and Function of Complex NetworksCelso GonçalvesAinda não há avaliações
- 6th Central Pay Commission Salary CalculatorDocumento15 páginas6th Central Pay Commission Salary Calculatorrakhonde100% (436)
- CULLITY, B. STORCK, S. Elements of X-Ray Diffraction. 3. Ed. - Ap. 13. Crystal Structure Data (P. 488-491) PDFDocumento4 páginasCULLITY, B. STORCK, S. Elements of X-Ray Diffraction. 3. Ed. - Ap. 13. Crystal Structure Data (P. 488-491) PDFFernando Freitas AlvesAinda não há avaliações
- Física ITA 2010 (Resolvido)Documento31 páginasFísica ITA 2010 (Resolvido)Fernando Freitas AlvesAinda não há avaliações
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5784)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (890)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (265)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2219)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (119)
- Test SignsDocumento12 páginasTest SignsSam FeinAinda não há avaliações
- The Basics of Pre Writing Skills FINALDocumento58 páginasThe Basics of Pre Writing Skills FINALtaraka sravyaAinda não há avaliações
- 9 Pressure Points For Sinus IssuesDocumento2 páginas9 Pressure Points For Sinus IssuesDiana SavuAinda não há avaliações
- Dr. A. Samy TAG Surgical Approaches - 1Documento7 páginasDr. A. Samy TAG Surgical Approaches - 1gehadbeddaAinda não há avaliações
- Rubin 2012 - NCL - Pitfalls of NCS and Needle EMGDocumento27 páginasRubin 2012 - NCL - Pitfalls of NCS and Needle EMGanjelikaAinda não há avaliações
- AntropometriDocumento13 páginasAntropometriArif HilmyAinda não há avaliações
- Radial and Median NervesDocumento33 páginasRadial and Median NervesveegeerAinda não há avaliações
- Bloq InfraDocumento6 páginasBloq InfraMaría Alejandra García QAinda não há avaliações
- Hand TherapyDocumento24 páginasHand TherapyJorge LucasAinda não há avaliações
- Sudan medical specialization board anatomy exam questionsDocumento41 páginasSudan medical specialization board anatomy exam questionsDania ZaidAinda não há avaliações
- Counting FingersDocumento16 páginasCounting Fingersscribdreader112Ainda não há avaliações
- Goniometry For Clinical PracticeDocumento7 páginasGoniometry For Clinical Practicedramitsaini33% (3)
- 1 ANT Anatomy of The Upper Limp TGDocumento129 páginas1 ANT Anatomy of The Upper Limp TGReath Gatkuoth DuothAinda não há avaliações
- Reflexology Charts and Relaxation TechniquesDocumento12 páginasReflexology Charts and Relaxation TechniquesJanetOllman100% (13)
- ID 7851 Стомат Англ Задачі 1540 English Sem 2Documento237 páginasID 7851 Стомат Англ Задачі 1540 English Sem 2acerAinda não há avaliações
- Albenice Reel Magic PDFDocumento79 páginasAlbenice Reel Magic PDFProfessorLeonidas83% (6)
- Anatomy Guide to the Human FigureDocumento51 páginasAnatomy Guide to the Human FigureGerman Enrique MartinezAinda não há avaliações
- Cosmetology Y3Documento144 páginasCosmetology Y3Christeen TallaAinda não há avaliações
- Erb's Palsy: Deformity, Nerve Roots, and TreatmentDocumento1.852 páginasErb's Palsy: Deformity, Nerve Roots, and TreatmentSK RaulAinda não há avaliações
- Muscle Name Table KpattonDocumento4 páginasMuscle Name Table Kpattonapi-222239614100% (1)
- Anatomy questions final examDocumento175 páginasAnatomy questions final examSevval OzcelikAinda não há avaliações
- De Quervain's Tenosynovitis - Hand - OrthobulletsDocumento4 páginasDe Quervain's Tenosynovitis - Hand - OrthobulletsTevin HanomansinghAinda não há avaliações
- Facial Magic E-BookletDocumento68 páginasFacial Magic E-BookletAnopsinh Rathore100% (1)
- Understanding Ulnar Nerve Injuries and AnatomyDocumento18 páginasUnderstanding Ulnar Nerve Injuries and Anatomynihal adriel gomesAinda não há avaliações
- Omaima NotesDocumento49 páginasOmaima NotesVictor Fabunmi0% (1)
- Hand AnatomyDocumento96 páginasHand AnatomyaaamirrrAinda não há avaliações
- HandDocumento95 páginasHandAsad noor mirzaAinda não há avaliações
- Hand Injuries & Their ManagementsDocumento78 páginasHand Injuries & Their ManagementsKuruAinda não há avaliações
- Mulligan Therapy: What Is It and How Does It WorkDocumento33 páginasMulligan Therapy: What Is It and How Does It WorkAgus SantosoAinda não há avaliações
- Ar 40-501 Standards of Medical FitnessDocumento134 páginasAr 40-501 Standards of Medical FitnessMark CheneyAinda não há avaliações