Você também pode gostar
- Tema6 - Resumen 3Documento5 páginasTema6 - Resumen 3Aguirre Lopez Juan ManuelAinda não há avaliações
- Teorema y Ejercicios Conservacion - Momento - AngularDocumento3 páginasTeorema y Ejercicios Conservacion - Momento - AngularjuanpereztrujilloAinda não há avaliações
- MiFee - CL - Pauta Ayudantia 8Documento3 páginasMiFee - CL - Pauta Ayudantia 8paquebotttAinda não há avaliações
- Mod 6Documento28 páginasMod 6Maquiventa MelquisedekAinda não há avaliações
- Cómo Leer Los Diagramas de DispersiónDocumento4 páginasCómo Leer Los Diagramas de DispersiónAndreRamirezValenzuelaAinda não há avaliações
- 07 RegresionDocumento30 páginas07 RegresionFerAinda não há avaliações
- Lab 4 FDocumento14 páginasLab 4 FJuan carlosc Leon sotoAinda não há avaliações
- 11 - U8bCinética Tridimensional 20Documento81 páginas11 - U8bCinética Tridimensional 20TUmamaAinda não há avaliações
- Derivadas Parciales Direccionales 2016 12 PDFDocumento4 páginasDerivadas Parciales Direccionales 2016 12 PDFGabu CamachoAinda não há avaliações
- Serie FourierDocumento6 páginasSerie Fourieradrian reyesAinda não há avaliações
- Holzer Porticos Saber - UCVDocumento19 páginasHolzer Porticos Saber - UCVRuffo Belisario Sallo CubaAinda não há avaliações
- Centro de Masas PapusDocumento7 páginasCentro de Masas Papusadler benites montalvoAinda não há avaliações
- Centroides 2Documento8 páginasCentroides 2adler benites montalvoAinda não há avaliações
- Clase 17 IntegralDocumento18 páginasClase 17 IntegralJhon Edison Bravo BuitragoAinda não há avaliações
- Modelos de Regresión Lineal Simple-ResumenDocumento5 páginasModelos de Regresión Lineal Simple-ResumenJericoAinda não há avaliações
- Capitulo Iii Medidas de Tendencia CentralDocumento51 páginasCapitulo Iii Medidas de Tendencia CentralClaudio Cruz RodríguezAinda não há avaliações
- ECONOMETRÍADocumento5 páginasECONOMETRÍASergio PérezAinda não há avaliações
- Buleje Moscoso - Metodo de ChebyshevDocumento14 páginasBuleje Moscoso - Metodo de ChebyshevM Steff BMAinda não há avaliações
- Identidad de EulerDocumento8 páginasIdentidad de EulerEduardo Baldeón CamposAinda não há avaliações
- Calculo II Guia Integral de RiemannDocumento6 páginasCalculo II Guia Integral de RiemanneaherreramAinda não há avaliações
- Análisis Regresión Lineal Simple Teoría PrácticaDocumento5 páginasAnálisis Regresión Lineal Simple Teoría PrácticaJorge PontonAinda não há avaliações
- Cinética de Cuerpos Rígidos en El PlanoDocumento9 páginasCinética de Cuerpos Rígidos en El PlanoJesus Ovalles100% (1)
- Regresión Lineal SimpleDocumento31 páginasRegresión Lineal SimpleYasely Lecca AvilaAinda não há avaliações
- Regresion Lineal SimpleDocumento57 páginasRegresion Lineal SimpleChickita BastidasAinda não há avaliações
- Practica 1 ExcelDocumento6 páginasPractica 1 ExcelY̶o̶s̶e̶l̶y̶n̶ ̶o̶c̶Ainda não há avaliações
- Trabajo de Fisica, Cuarto CorteDocumento34 páginasTrabajo de Fisica, Cuarto Cortemarlon stiven arizalunaAinda não há avaliações
- Flexión Esviada y Compuesta Esviada PDFDocumento16 páginasFlexión Esviada y Compuesta Esviada PDFCesar RosasAinda não há avaliações
- Modelos discretosDocumento3 páginasModelos discretosAlexita LopezAinda não há avaliações
- Taller 1Documento4 páginasTaller 1BenZo4630 3Ainda não há avaliações
- Apunte 2.0 Datos Bivariados 20210406 MartesDocumento5 páginasApunte 2.0 Datos Bivariados 20210406 MartesCaliope TaliaAinda não há avaliações
- Calculo Taller 1Documento32 páginasCalculo Taller 1Juan Castro FrancoAinda não há avaliações
- Energía en El Movimiento Rotacional - Clase 2Documento6 páginasEnergía en El Movimiento Rotacional - Clase 2Hebert Nelson Quiñonez OrtizAinda não há avaliações
- 4.mínimos Cuadrados01Documento3 páginas4.mínimos Cuadrados01chat 1204Ainda não há avaliações
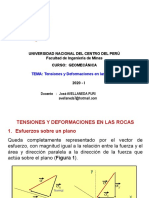
- Tensiones y Deformaciones en Las RocasDocumento21 páginasTensiones y Deformaciones en Las RocasraAinda não há avaliações
- Taller 1 Econometría 1 PDFDocumento4 páginasTaller 1 Econometría 1 PDFVivian Astorayme HurtadoAinda não há avaliações
- Laboratorio 3 Fisic 1Documento10 páginasLaboratorio 3 Fisic 1JANETH PATRICIA HERNANDEZ BASTIDASAinda não há avaliações
- Tema 22Documento12 páginasTema 22Arturo R.G.Ainda não há avaliações
- Sistemas de ecuaciones linealesDocumento33 páginasSistemas de ecuaciones linealesAwka MülfenAinda não há avaliações
- Parcial 3 Mecánica Cuántica, Gabriel LeónDocumento4 páginasParcial 3 Mecánica Cuántica, Gabriel LeónGabriel LeonAinda não há avaliações
- PRACTICA N 1. Construcción de Gráficas y Ecuaciones EmpíricasDocumento4 páginasPRACTICA N 1. Construcción de Gráficas y Ecuaciones EmpíricasGustavo Ortega ContrerasAinda não há avaliações
- Análisis estadísticos espacialesDocumento19 páginasAnálisis estadísticos espacialesYerlen Carolina Cabarcas RodríguezAinda não há avaliações
- Curso Ana Regres 2Documento245 páginasCurso Ana Regres 2Manuel GarzaAinda não há avaliações
- Regresión Lineal SimpleDocumento28 páginasRegresión Lineal SimpleAzul Geronimo RojasAinda não há avaliações
- Integral Definida: Sumas de Riemann y Teoremas FundamentalesDocumento46 páginasIntegral Definida: Sumas de Riemann y Teoremas FundamentalesHeydy TintayaAinda não há avaliações
- Denavit HartenbergDocumento6 páginasDenavit HartenbergchendoAinda não há avaliações
- Formulario ÓPTICADocumento15 páginasFormulario ÓPTICAJuan García MenéndezAinda não há avaliações
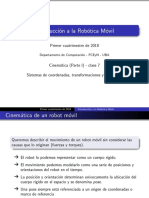
- Introducci Onalarob Otica M Ovil: Primer Cuatrimestre de 2018Documento21 páginasIntroducci Onalarob Otica M Ovil: Primer Cuatrimestre de 2018L.RobledoAinda não há avaliações
- Polinomios PDFDocumento25 páginasPolinomios PDFDavid AyalaAinda não há avaliações
- 03 - Propiedades AsintóticasDocumento9 páginas03 - Propiedades AsintóticasMile León MezaAinda não há avaliações
- Integral Numérica ADocumento8 páginasIntegral Numérica AArturo Ramírez AltamiranoAinda não há avaliações
- Sistema de ecuaciones lineales y álgebra linealDocumento3 páginasSistema de ecuaciones lineales y álgebra linealJuan GiraldoAinda não há avaliações
- Superficies y Curvas: Sepi Esiqie Ipn Matem Aticas Christian Bouchot 05 de Marzo 2007Documento30 páginasSuperficies y Curvas: Sepi Esiqie Ipn Matem Aticas Christian Bouchot 05 de Marzo 2007MaryAinda não há avaliações
- DivisibilidadDocumento58 páginasDivisibilidadAlex ReyesAinda não há avaliações
- Integral DefinidaDocumento17 páginasIntegral DefinidaChabeli Cruzado SuárezAinda não há avaliações
- Informe de Mecanica de SolidosDocumento10 páginasInforme de Mecanica de SolidosAngel Jesus Quintana AltamiranoAinda não há avaliações
- U12 474-475 PDFDocumento2 páginasU12 474-475 PDFChris CollinsAinda não há avaliações
- Trabajo Interpolación de La Spline CúbicaDocumento13 páginasTrabajo Interpolación de La Spline CúbicaMaria Naral100% (1)
- Soluciones AMII FIUBA Guia I - 1c 2019 - Geometria Del Plano y Del Espacio - SilvinaDocumento14 páginasSoluciones AMII FIUBA Guia I - 1c 2019 - Geometria Del Plano y Del Espacio - Silvinajuaz38Ainda não há avaliações
- Leccion Venciendo Las Barreras Del Evangelismo 18Documento5 páginasLeccion Venciendo Las Barreras Del Evangelismo 18Daniel CifuentesAinda não há avaliações
- DíptidoDocumento2 páginasDíptidoDaniel CifuentesAinda não há avaliações
- Manual Auto CadDocumento43 páginasManual Auto Cadsmartcad60Ainda não há avaliações
- Transformaciones Lineales v2.0Documento6 páginasTransformaciones Lineales v2.0diegoc147Ainda não há avaliações
- Curso AutoCAD 3D del SENA para diseño e ingenieríaDocumento2 páginasCurso AutoCAD 3D del SENA para diseño e ingenieríaWilliam Reyes MedinaAinda não há avaliações
- Descomposición en Valores Singulares (SVDDocumento12 páginasDescomposición en Valores Singulares (SVDalberto_c_6100% (1)
- Colosenses PDFDocumento9 páginasColosenses PDFDaniel CifuentesAinda não há avaliações
- Glossary 1Documento6 páginasGlossary 1Estefanía Pernett NoriegaAinda não há avaliações
- Talleres Refam Nivel 1 Leccion 1Documento2 páginasTalleres Refam Nivel 1 Leccion 1Sandra Patricia Marquez Serrano89% (9)
- Polinomios Matriciales: Autovalores y AutovectoresDocumento2 páginasPolinomios Matriciales: Autovalores y AutovectoresDaniel CifuentesAinda não há avaliações
- Glossary Algebra LinealDocumento9 páginasGlossary Algebra LinealJulian QuinteroAinda não há avaliações
- Unicidad de DiosDocumento336 páginasUnicidad de Diosadonayrojasortiz92% (12)
- calcII 0708 GraficasDocumento18 páginascalcII 0708 GraficasRodolfo RuaroAinda não há avaliações
- Descomposión en Valores SingularesDocumento52 páginasDescomposión en Valores SingularesDaniel CifuentesAinda não há avaliações
- DVS_matrices_menos40Documento16 páginasDVS_matrices_menos40Jaime SalguerroAinda não há avaliações
- Complejos v2.0Documento3 páginasComplejos v2.0pabloAinda não há avaliações
- Ecuaciones Diferenciales Lineales Apunte de MancillaDocumento35 páginasEcuaciones Diferenciales Lineales Apunte de MancillaAlan RinaldiAinda não há avaliações
- Descomposicio QRDocumento4 páginasDescomposicio QRMatias GomesAinda não há avaliações
- Leccion 1 MatlabferDocumento54 páginasLeccion 1 MatlabferDaniel CifuentesAinda não há avaliações
- El Bandoneon Ricardo Salton PDFDocumento16 páginasEl Bandoneon Ricardo Salton PDFDaniel CifuentesAinda não há avaliações
- Aplicación de Diagonalización de Matrices Simétricas A Física (Silvina Boggi - Facultad de Ingenieria Universidad de Buenos Aires)Documento3 páginasAplicación de Diagonalización de Matrices Simétricas A Física (Silvina Boggi - Facultad de Ingenieria Universidad de Buenos Aires)Daniel CifuentesAinda não há avaliações
- Matlab Algebra Lineal PDFDocumento42 páginasMatlab Algebra Lineal PDFLuis MadridAinda não há avaliações
- NutshellDocumento1 páginaNutshellEduardo Alejandro IIIAinda não há avaliações
- Dibujo TecnicoDocumento18 páginasDibujo Tecnicoalexhez97% (38)
- Curvas ConicasDocumento4 páginasCurvas ConicasAriel QuispeAinda não há avaliações
- Tema 2: Representación Del Punto, Recta y Plano, en El Sistema DiédricoDocumento22 páginasTema 2: Representación Del Punto, Recta y Plano, en El Sistema DiédricoDaniel CifuentesAinda não há avaliações
- SuperficiesDocumento45 páginasSuperficiesDaniel CifuentesAinda não há avaliações
- Ecuaciones Diferenciales MancillaDocumento25 páginasEcuaciones Diferenciales MancillaHarmony Winchester PresleyAinda não há avaliações
- Introducción Álgebra LinealDocumento7 páginasIntroducción Álgebra LinealDaniel CifuentesAinda não há avaliações
- Trabajo de Teoria de ColasDocumento16 páginasTrabajo de Teoria de ColasLed Aldana100% (3)
- Secuencia Didactica 2018 NominasDocumento11 páginasSecuencia Didactica 2018 Nominasangelsantibanezlopez100% (3)
- Trabajo InvestigativoDocumento10 páginasTrabajo InvestigativoDaniel AlvarezAinda não há avaliações
- En El Eje de La FiguraDocumento37 páginasEn El Eje de La FiguraSibaja Chávez LeandroAinda não há avaliações
- Pruebas de Entrenamiento (1 - 20) .Documento20 páginasPruebas de Entrenamiento (1 - 20) .Javier GarciaAinda não há avaliações
- HC - Apuntes Segundo Cuatrimestre 2009-2010Documento109 páginasHC - Apuntes Segundo Cuatrimestre 2009-2010Pepe Gotera100% (1)
- MERCADEODocumento10 páginasMERCADEOJamexito ErazzoAinda não há avaliações
- Recu Segundo Periodo 10Documento6 páginasRecu Segundo Periodo 10Johana MariaAinda não há avaliações
- Fase 2 - Estadistica InferencialDocumento3 páginasFase 2 - Estadistica InferencialNatalia Yiczel Lopez VasquezAinda não há avaliações
- A.de SANCHEZ. Desarrollo de Habilidades Del PensamientoDocumento12 páginasA.de SANCHEZ. Desarrollo de Habilidades Del PensamientoPepe Bach Stravinsky100% (1)
- MATEMÁTICAS Material N MA-18a CUADERNO DE EJERCICIOS N 14 CONGRUENCIA DE TRIÁNGULOS Y ELEMENTOSDocumento8 páginasMATEMÁTICAS Material N MA-18a CUADERNO DE EJERCICIOS N 14 CONGRUENCIA DE TRIÁNGULOS Y ELEMENTOSjorgeAinda não há avaliações
- 10° - U1 - Taller 06 - Ángulos y Sistemas de MediciónDocumento1 página10° - U1 - Taller 06 - Ángulos y Sistemas de MediciónRodrigo Carazo AcostaAinda não há avaliações
- Guia Ciclo 6 Matematicas 4° MediosDocumento9 páginasGuia Ciclo 6 Matematicas 4° MediosLautaro MartínezAinda não há avaliações
- Determinación de Momentos FlectoresDocumento8 páginasDeterminación de Momentos FlectoresDiegoSotaGrauAinda não há avaliações
- 09 Movimiento Circular Uniforme (M.C.U) (Cinetómetro)Documento2 páginas09 Movimiento Circular Uniforme (M.C.U) (Cinetómetro)Jordan AngaraAinda não há avaliações
- Ejercicio 1Documento8 páginasEjercicio 1selena100% (2)
- Preguntas de Algebra 1ero y 2doDocumento5 páginasPreguntas de Algebra 1ero y 2doHenry R CarrascoAinda não há avaliações
- Aritmética 05 PsDocumento4 páginasAritmética 05 PsJhoel LCAinda não há avaliações
- Tipos de Muestreo y Sus Principales Aplicaciones Evidencia 2Documento2 páginasTipos de Muestreo y Sus Principales Aplicaciones Evidencia 2carlos quinteroAinda não há avaliações
- Introducción al análisis fluido dinámico con ANSYS MULTIPHYSICSDocumento37 páginasIntroducción al análisis fluido dinámico con ANSYS MULTIPHYSICSVictor Gimenez100% (1)
- INF319 Examen Primer Parcial Lógica Proposicional y CuantificadoresDocumento9 páginasINF319 Examen Primer Parcial Lógica Proposicional y CuantificadoresRonny R CabanaAinda não há avaliações
- Estudio de PeatonesDocumento45 páginasEstudio de PeatonesjohanAinda não há avaliações
- Treybal 6.3Documento7 páginasTreybal 6.3Daniel MoralesAinda não há avaliações
- Apuntes Variable Compleja Castro Vidal PDFDocumento194 páginasApuntes Variable Compleja Castro Vidal PDFRenato MendozaAinda não há avaliações
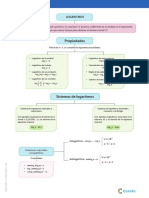
- Lamina LogaritmosDocumento1 páginaLamina LogaritmosAugusto AgustinAinda não há avaliações
- Matemática 6° SecundariaDocumento4 páginasMatemática 6° SecundariaMaryzza QuinterosAinda não há avaliações
- Elementos de Ingeniería FerroviariaDocumento4 páginasElementos de Ingeniería Ferroviariapabloj17150% (2)
- Tarea2 BIEN DESARROLLADODocumento27 páginasTarea2 BIEN DESARROLLADONicol SuarezAinda não há avaliações
- Cap2 - Razones Trigonométricas en El Triángulo RectánguloDocumento34 páginasCap2 - Razones Trigonométricas en El Triángulo Rectángulojrene2014Ainda não há avaliações
- Sesion Problemas de DivisiónDocumento5 páginasSesion Problemas de DivisiónJohana100% (1)