Você também pode gostar
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (400)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (345)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- Digital Communications Fundamentals and Ap - Bernard Sklar Book Part 1Documento310 páginasDigital Communications Fundamentals and Ap - Bernard Sklar Book Part 1Muhammad Waqas ENG Department83% (6)
- 4 ArpDocumento97 páginas4 Arppkrsuresh2013Ainda não há avaliações
- 2022 09 13 Resolverl - 1662966826Documento33 páginas2022 09 13 Resolverl - 1662966826pkrsuresh2013Ainda não há avaliações
- 2 ApexDocumento42 páginas2 Apexpkrsuresh2013Ainda não há avaliações
- CSComputingDocumento108 páginasCSComputingpkrsuresh2013Ainda não há avaliações
- Ananatomyoftcpmiddle 1663117664Documento21 páginasAnanatomyoftcpmiddle 1663117664pkrsuresh2013Ainda não há avaliações
- A Deadlock: Mutual ExclusionDocumento8 páginasA Deadlock: Mutual Exclusionpkrsuresh2013Ainda não há avaliações
- Class15 - Data WarehousingDocumento76 páginasClass15 - Data Warehousingpkrsuresh2013Ainda não há avaliações
- Index Copernicus Value or Impact Factor of 5.36: (Senior Editor-in-Chief) (Editor-in-Chief)Documento1 páginaIndex Copernicus Value or Impact Factor of 5.36: (Senior Editor-in-Chief) (Editor-in-Chief)pkrsuresh2013Ainda não há avaliações
- Overview of The Object Model of ODMGDocumento2 páginasOverview of The Object Model of ODMGpkrsuresh2013Ainda não há avaliações
- Subnet Planning and VLANDocumento12 páginasSubnet Planning and VLANpkrsuresh2013Ainda não há avaliações
- DataComm and TCP IPDocumento48 páginasDataComm and TCP IPpkrsuresh2013Ainda não há avaliações
- Cryptanalysis ExampleDocumento21 páginasCryptanalysis Examplepkrsuresh2013Ainda não há avaliações
- Authentication/Authorization, Access List, Filters, Firewalls, IDS/IPSDocumento32 páginasAuthentication/Authorization, Access List, Filters, Firewalls, IDS/IPSpkrsuresh2013Ainda não há avaliações
- Internatonal PaperDocumento1 páginaInternatonal Paperpkrsuresh2013Ainda não há avaliações
- Conference PaperDocumento1 páginaConference Paperpkrsuresh2013Ainda não há avaliações
- Transmission Line CircuitsDocumento3 páginasTransmission Line Circuitspkrsuresh2013Ainda não há avaliações
- RF and Microwave Frequency Circuits and Systems RN620Documento7 páginasRF and Microwave Frequency Circuits and Systems RN620pkrsuresh2013Ainda não há avaliações
- RF and Microwave Circuits and Systems. Laboratory #1: ObjectivesDocumento8 páginasRF and Microwave Circuits and Systems. Laboratory #1: Objectivespkrsuresh2013Ainda não há avaliações
- LAB3Documento3 páginasLAB3pkrsuresh2013Ainda não há avaliações
- Laboratory 2 Design of Impedance TransformersDocumento18 páginasLaboratory 2 Design of Impedance Transformerspkrsuresh2013Ainda não há avaliações
- Impulse Response of XDocumento3 páginasImpulse Response of Xpkrsuresh2013Ainda não há avaliações
- DSP Lab 2Documento5 páginasDSP Lab 2pkrsuresh2013Ainda não há avaliações
- Lab 6Documento11 páginasLab 6pkrsuresh2013100% (1)
- Lab ReportDocumento13 páginasLab Reportpkrsuresh2013Ainda não há avaliações
- DFT of The SignalDocumento4 páginasDFT of The Signalpkrsuresh2013Ainda não há avaliações
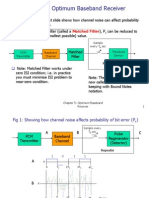
- Chapter 5 Optimum Baseband ReceiverDocumento16 páginasChapter 5 Optimum Baseband ReceiverMohamed Fahmy100% (1)
- Phased Gs BookDocumento60 páginasPhased Gs BookGuang ChenAinda não há avaliações
- PAM NotesDocumento18 páginasPAM NotesGabrielAinda não há avaliações
- Performance Analysis of Digital Communication Systems: Unit: 3Documento49 páginasPerformance Analysis of Digital Communication Systems: Unit: 3Neha VermaAinda não há avaliações
- Coherent MIMO Radar The Phased Array and Orthogonal WaveformsDocumento16 páginasCoherent MIMO Radar The Phased Array and Orthogonal WaveformsPriyaSbmAinda não há avaliações
- Lecture 06 - Optimal Receiver DesignDocumento21 páginasLecture 06 - Optimal Receiver DesignKhoa PhamAinda não há avaliações
- EEE461Lect11 (Matched Filters)Documento19 páginasEEE461Lect11 (Matched Filters)Jamal MesidorAinda não há avaliações
- DigiCom NotesDocumento25 páginasDigiCom NotesJoseph Victor Oppus BaquialAinda não há avaliações
- Retinal Blood Vessels Segmentation: Presented by Mithilesh Kumar Singh YadavDocumento14 páginasRetinal Blood Vessels Segmentation: Presented by Mithilesh Kumar Singh Yadavmithilesh yadavAinda não há avaliações
- dc01 Show - PpsDocumento49 páginasdc01 Show - Ppsscribdacct123Ainda não há avaliações
- The Application of Spread Spectrum Signaling Techniques To Underwater Acoustic NavigationDocumento7 páginasThe Application of Spread Spectrum Signaling Techniques To Underwater Acoustic NavigationXiaofengFanAinda não há avaliações
- Chapter 1Documento37 páginasChapter 1fayez JhsAinda não há avaliações
- An Approach To Increase Data Transmission Capacity in Coaxial Cable Communication SystemDocumento94 páginasAn Approach To Increase Data Transmission Capacity in Coaxial Cable Communication SystemKhalif ElnaddabAinda não há avaliações
- DC Unit Test 2 Question BankDocumento4 páginasDC Unit Test 2 Question BankSiva KrishnaAinda não há avaliações
- Digital Transmission: Carrier-to-Noise Ratio, Signal-to-Noise Ratio, and Modulation Error RatioDocumento41 páginasDigital Transmission: Carrier-to-Noise Ratio, Signal-to-Noise Ratio, and Modulation Error RatioAntonio RodonceaAinda não há avaliações
- Ec8501-Digital Communication-1142519233-1564326036555 - Ec 8501 DC QBDocumento28 páginasEc8501-Digital Communication-1142519233-1564326036555 - Ec 8501 DC QBmenakadevieceAinda não há avaliações
- Assignment 2: October 2020Documento3 páginasAssignment 2: October 2020dandeashritAinda não há avaliações
- SAR Signal ProcessingDocumento84 páginasSAR Signal ProcessingDoha AbbasAinda não há avaliações
- EITN90 Radar and Remote Sensing Lecture 11: Fundamentals of Pulse Compression WaveformsDocumento60 páginasEITN90 Radar and Remote Sensing Lecture 11: Fundamentals of Pulse Compression Waveformswire010Ainda não há avaliações
- Data Transmission ExercisesDocumento23 páginasData Transmission ExercisesSubash PandeyAinda não há avaliações
- Matched Filter - WikipediaDocumento9 páginasMatched Filter - WikipediaPaidamoyo MuzvidziwaAinda não há avaliações
- EE354 Midterm2 W SolutionsDocumento5 páginasEE354 Midterm2 W SolutionsErhan TombuloğluAinda não há avaliações
- Designing A Basic Monostatic Pulse Radar - MATLAB & Simulink Example - MathWorks IndiaDocumento10 páginasDesigning A Basic Monostatic Pulse Radar - MATLAB & Simulink Example - MathWorks Indiaanon020202Ainda não há avaliações
- 10 Detection of Signals in NoiseDocumento20 páginas10 Detection of Signals in NoisekirankumarrathAinda não há avaliações
- Digital Communication Systems: Unit-1 Source Coding SystemsDocumento192 páginasDigital Communication Systems: Unit-1 Source Coding SystemsAkkonduru KumarAinda não há avaliações
- Analysis of A Sub-Bottom Sonar Profiler For Surveying Underwater Archaeological SitesDocumento101 páginasAnalysis of A Sub-Bottom Sonar Profiler For Surveying Underwater Archaeological SitesAldikaAinda não há avaliações
- Matched Filtering and Digital Pulse Amplitude Modulation (PAM)Documento32 páginasMatched Filtering and Digital Pulse Amplitude Modulation (PAM)lz1233Ainda não há avaliações
- Matched Filter PaperDocumento7 páginasMatched Filter PaperAlex Krockas Botamas ChonnaAinda não há avaliações