Você também pode gostar
- Dragon Bundle: It's Time To & Make Projects That MatterDocumento18 páginasDragon Bundle: It's Time To & Make Projects That MatterRajesh ShindeAinda não há avaliações
- IGV Commissioning For AddFem POCO+ LogicDocumento17 páginasIGV Commissioning For AddFem POCO+ LogicHankar Aravins100% (3)
- Rampage User Manual PDFDocumento6 páginasRampage User Manual PDFÁngel Sánchez BorgesAinda não há avaliações
- A380 RoedtsDocumento12 páginasA380 RoedtsAjith Lal J SAinda não há avaliações
- Iec-Vit (Vit-B) - Lti (Lti-B) - 10puDocumento1 páginaIec-Vit (Vit-B) - Lti (Lti-B) - 10puSergio aldoAinda não há avaliações
- (2020-2021 Fall Semester FINAL Exam) : Introduction To Fuzzy LogicDocumento21 páginas(2020-2021 Fall Semester FINAL Exam) : Introduction To Fuzzy LogicAlperen YılmazAinda não há avaliações
- Aircraft Controls Final ExamDocumento29 páginasAircraft Controls Final ExamMohammed Qaid AlathwaryAinda não há avaliações
- Free Space Optical Communication Tip-Tilt-Mirror BrochureDocumento15 páginasFree Space Optical Communication Tip-Tilt-Mirror Brochuresandeep kumar100% (1)
- Adc LabDocumento4 páginasAdc Labtanmay sharmaAinda não há avaliações
- Development of The Model of A Self Excited LoopDocumento23 páginasDevelopment of The Model of A Self Excited LoopDheeraj SharmaAinda não há avaliações
- EEE 3310 LabSheet 06Documento21 páginasEEE 3310 LabSheet 06proddut ChakrabortyAinda não há avaliações
- Ets Eng525Documento24 páginasEts Eng525Hubert Vásquez CuevaAinda não há avaliações
- Lec8 Numerical Distance ProtectionDocumento24 páginasLec8 Numerical Distance ProtectionEVTAinda não há avaliações
- A Project Report ON Thruster ModellingDocumento21 páginasA Project Report ON Thruster ModellingRohan GaonkarAinda não há avaliações
- C and I Lab Manual - 1Documento95 páginasC and I Lab Manual - 1iniyavan3119Ainda não há avaliações
- Iec Sit Sit A 10pu - 1 PDFDocumento1 páginaIec Sit Sit A 10pu - 1 PDFIstighfar Adhitama100% (1)
- TIA PRO1 06 Binary Operations 2 enDocumento19 páginasTIA PRO1 06 Binary Operations 2 endikiAinda não há avaliações
- Ieee-Eit (Iec-F) - 10puDocumento1 páginaIeee-Eit (Iec-F) - 10puSergio aldoAinda não há avaliações
- 30 TwinCAT NC General ENDocumento65 páginas30 TwinCAT NC General ENShubham PatilAinda não há avaliações
- Over Current RelayDocumento10 páginasOver Current Relayma77mudrafat123Ainda não há avaliações
- Control Systems (CS) : Lecture-4-5-6 Lag Compensation & Lag-Lead CompensationDocumento51 páginasControl Systems (CS) : Lecture-4-5-6 Lag Compensation & Lag-Lead CompensationMeer Zafarullah NoohaniAinda não há avaliações
- Aspen RazoaDocumento11 páginasAspen RazoaGiovani ScarpatiAinda não há avaliações
- Intro. To Mechatronics Lab 4 EMSDocumento20 páginasIntro. To Mechatronics Lab 4 EMSShreesha BhaktaAinda não há avaliações
- Online Control Lecture #3Documento17 páginasOnline Control Lecture #3Noor GamingAinda não há avaliações
- Generator-Protection-Functions-And-Test-Methods-Part 5Documento4 páginasGenerator-Protection-Functions-And-Test-Methods-Part 5engineering.arianAinda não há avaliações
- Online Control Lecture 3Documento17 páginasOnline Control Lecture 3Amylia NatashaAinda não há avaliações
- How To Operate E-Cam On ASDA-A2Documento151 páginasHow To Operate E-Cam On ASDA-A2Siegfried EstradaAinda não há avaliações
- Control of A DC Motor DriveDocumento25 páginasControl of A DC Motor DrivePoliConDrive0% (1)
- Selecting Delay Lines For Optical MeasurementsDocumento3 páginasSelecting Delay Lines For Optical Measurementsvedat sakaryaAinda não há avaliações
- Lab 07 DSP: Lab # 07 Z-Transform and Inverse Z-TransformDocumento15 páginasLab 07 DSP: Lab # 07 Z-Transform and Inverse Z-TransformAhsan Jamil AwanAinda não há avaliações
- Trip Curve IEC-UIT-10PU: Ultra Inverse Time 3000TCDocumento1 páginaTrip Curve IEC-UIT-10PU: Ultra Inverse Time 3000TCSergio aldoAinda não há avaliações
- Chapter 7 System Compensation: (Linear Control System Design)Documento35 páginasChapter 7 System Compensation: (Linear Control System Design)Khin AyeAinda não há avaliações
- Adaptive Control Design For The Buck-Boost Converter With Desired Pole/zero AssignmentDocumento7 páginasAdaptive Control Design For The Buck-Boost Converter With Desired Pole/zero AssignmentIsrar Ul HaqAinda não há avaliações
- Thor I. Fossen, Svein I. Sagatun and Asgeir J. Srensen: F N P K N P P P P K N N P D P P D P P P F N PDocumento8 páginasThor I. Fossen, Svein I. Sagatun and Asgeir J. Srensen: F N P K N P P P P K N N P D P P D P P P F N PIrma Mandujano GonzalezAinda não há avaliações
- Cam Design Cam Design: Output FunctionDocumento54 páginasCam Design Cam Design: Output FunctionasritaipAinda não há avaliações
- Power System LabDocumento54 páginasPower System LabZannat E Noor AobonyAinda não há avaliações
- Chapter (2) "Amplitude Modulation": ContDocumento16 páginasChapter (2) "Amplitude Modulation": ContMohamed SaeeDAinda não há avaliações
- Me55 Control Engineering: Sharanabasava C PilliDocumento12 páginasMe55 Control Engineering: Sharanabasava C PilliS C PilliAinda não há avaliações
- Autoregressive Moving-Average Models: Definition 2.1 (ARMA Models) - A Stochastic Process FXDocumento21 páginasAutoregressive Moving-Average Models: Definition 2.1 (ARMA Models) - A Stochastic Process FXWyara Vanesa MouraAinda não há avaliações
- Lec 2 PID ControlDocumento8 páginasLec 2 PID ControlAep Kusman HeriyantoAinda não há avaliações
- Catalogo Abb Con Curvas IECDocumento15 páginasCatalogo Abb Con Curvas IECMiguel Blasco MartínezAinda não há avaliações
- PID ControlDocumento38 páginasPID ControlInitial MAinda não há avaliações
- Name: Zulfiqar Ali.: Department of Electronic Engineering University of Engineering and Technology Abbottabad CampusDocumento15 páginasName: Zulfiqar Ali.: Department of Electronic Engineering University of Engineering and Technology Abbottabad CampusZulfiqar AliAinda não há avaliações
- Auto Control Loops in Thermal Power Plant: Sith - Ananda KumarDocumento37 páginasAuto Control Loops in Thermal Power Plant: Sith - Ananda KumarVignesh RajanAinda não há avaliações
- ACS Experiments 3,4Documento5 páginasACS Experiments 3,4Aditya SharmaAinda não há avaliações
- EE 490 - Lab No. 1Documento14 páginasEE 490 - Lab No. 1FlyerfyeAinda não há avaliações
- Transformer Sizing CalculationDocumento3 páginasTransformer Sizing CalculationvenkateshbitraAinda não há avaliações
- Measuring Speed and Position With A Quadrature EncoderDocumento3 páginasMeasuring Speed and Position With A Quadrature Encoderbetodias30Ainda não há avaliações
- PLC Programming Ladder LogicDocumento18 páginasPLC Programming Ladder LogicPackiyaraj BMSAinda não há avaliações
- Sampleproblems2 PDFDocumento4 páginasSampleproblems2 PDFJose Martin Cisneros MandujanoAinda não há avaliações
- Relay Testing ProcedureDocumento144 páginasRelay Testing ProcedureLawrence Alex100% (1)
- 01 - Dynamic Testing of Distance ProtectionDocumento19 páginas01 - Dynamic Testing of Distance ProtectionalimaghamiAinda não há avaliações
- Dynamic Testing of Distance ProtectionDocumento19 páginasDynamic Testing of Distance Protectionapic20Ainda não há avaliações
- E) Phase Directional Overcurrent (Ansi 67P) : 5 Settings 5.5 Grouped ElementsDocumento3 páginasE) Phase Directional Overcurrent (Ansi 67P) : 5 Settings 5.5 Grouped Elementsmohamed anasAinda não há avaliações
- Exp 3Documento6 páginasExp 3Dinesh ReddyAinda não há avaliações
- SG As Servo Driver User ManualDocumento60 páginasSG As Servo Driver User ManualGokul RAinda não há avaliações
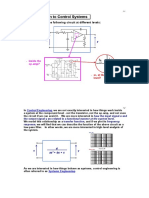
- Introduction To Control Systems: We Can Consider The Following Circuit at Different LevelsDocumento19 páginasIntroduction To Control Systems: We Can Consider The Following Circuit at Different LevelsPeter ParkerAinda não há avaliações
- Reduced Order Modelling For Flow Control (Edited by BERND R. NOACK, MAREK MORZYNSKI, GILEAD TADMOR)Documento340 páginasReduced Order Modelling For Flow Control (Edited by BERND R. NOACK, MAREK MORZYNSKI, GILEAD TADMOR)Jawad KhawarAinda não há avaliações
- DSP Laboratory Activity 2Documento55 páginasDSP Laboratory Activity 2Ayel Cejas Costiniano100% (1)
- Programas Interculturales en JapónDocumento4 páginasProgramas Interculturales en JapónlancellerAinda não há avaliações
- Fundamentals of ANNDocumento213 páginasFundamentals of ANNJosi MoAinda não há avaliações
- Tutorial-1-Machine Learning-2020Documento1 páginaTutorial-1-Machine Learning-2020Niranjitha HVAinda não há avaliações
- Chapter 5 - State Space RepresentationDocumento37 páginasChapter 5 - State Space Representationvenosyah devanAinda não há avaliações
- Seminar Presentation: Artificial Intelligence (AI)Documento15 páginasSeminar Presentation: Artificial Intelligence (AI)DeepJyoti MEdhiAinda não há avaliações
- Solution Manual To Third Edition AIDocumento62 páginasSolution Manual To Third Edition AINikki BhalodiyaAinda não há avaliações
- Image Sentiment Analysis Using Deep LearningDocumento4 páginasImage Sentiment Analysis Using Deep LearningCHOUDHARY SHAILENDRA VIJAYCHANDRAAinda não há avaliações
- SQL CommandsDocumento30 páginasSQL Commandswahyuni sriAinda não há avaliações
- Robust GsDocumento264 páginasRobust GsLucas S. CarmoAinda não há avaliações
- A Gentle Introduction To Neural Machine TranslationDocumento14 páginasA Gentle Introduction To Neural Machine TranslationDragan ZhivaljevikjAinda não há avaliações
- GROUP 1-MODULE 2-LESSON 1 - Article or Cases (Privacy and Security)Documento3 páginasGROUP 1-MODULE 2-LESSON 1 - Article or Cases (Privacy and Security)angelfabillaraalaAinda não há avaliações
- Event Driven 6Documento26 páginasEvent Driven 6dawitzeganeAinda não há avaliações
- Artificial Intelligence Bayesian NetworksDocumento6 páginasArtificial Intelligence Bayesian NetworksAdrian Rodríguez LouzanAinda não há avaliações
- Named Entity Recognition in English Using Hidden Markov ModelDocumento6 páginasNamed Entity Recognition in English Using Hidden Markov ModelAnonymous lVQ83F8mCAinda não há avaliações
- Effects of ZoH and Controller DesignDocumento22 páginasEffects of ZoH and Controller DesignSufiSayyidZakiyahAinda não há avaliações
- Offline Handwritten Character Recognition Using MLPNN and PSO AlgorithmDocumento3 páginasOffline Handwritten Character Recognition Using MLPNN and PSO AlgorithmInternational Journal of Innovative Science and Research TechnologyAinda não há avaliações
- UNIT 1 MongoDB Fully CompleteDocumento60 páginasUNIT 1 MongoDB Fully CompleteRishiAinda não há avaliações
- Audio-Lingual MethodDocumento11 páginasAudio-Lingual MethodAna Santiago CiveraAinda não há avaliações
- F A LSTM: Inancial Series Prediction Using TtentionDocumento10 páginasF A LSTM: Inancial Series Prediction Using TtentionfkdlfsAinda não há avaliações
- « Introduction to Biomedical Engineering»: СourseDocumento5 páginas« Introduction to Biomedical Engineering»: СourseEbrahim Abd El HadyAinda não há avaliações
- Image Processing With PythonDocumento21 páginasImage Processing With PythonSarah bookAinda não há avaliações
- Intelligent Surveillance System Using Deep Learning 1Documento9 páginasIntelligent Surveillance System Using Deep Learning 1Varun MittalaAinda não há avaliações
- Human Activity RecognitionDocumento40 páginasHuman Activity RecognitionRasool ReddyAinda não há avaliações
- Business+Problem+Solving +Lecture+NotesDocumento5 páginasBusiness+Problem+Solving +Lecture+NotesAdit PaliwalAinda não há avaliações
- Business Analytics Certification Program LearnbayDocumento30 páginasBusiness Analytics Certification Program Learnbaymanit singhAinda não há avaliações
- 04 - A Fuzzy SystemDocumento55 páginas04 - A Fuzzy SystemLini IckappanAinda não há avaliações
- Evolution of Big Data and Tools For Big DataDocumento9 páginasEvolution of Big Data and Tools For Big Datalu09Ainda não há avaliações