Você também pode gostar
- Laplace and Inverse TransformsDocumento40 páginasLaplace and Inverse TransformsDheerajOmprasadAinda não há avaliações
- Data Compression TechniquesDocumento41 páginasData Compression TechniquesKasozi BakulumpagiAinda não há avaliações
- Chapter 3 Semiconductor Basics and Wafer ManufacturingDocumento44 páginasChapter 3 Semiconductor Basics and Wafer Manufacturing李承家Ainda não há avaliações
- 12 - Laplace Transforms and Their Applications PDFDocumento72 páginas12 - Laplace Transforms and Their Applications PDFMonty100% (1)
- Laplace Transforms and Its Applications: Unit-IiiDocumento68 páginasLaplace Transforms and Its Applications: Unit-IiiDiwakar ChauhanAinda não há avaliações
- MEE315-Process Instrumentation & Control: Dr. Dipesh S. PatleDocumento18 páginasMEE315-Process Instrumentation & Control: Dr. Dipesh S. Patle;(Ainda não há avaliações
- Laplace HadyDocumento52 páginasLaplace HadyT AAinda não há avaliações
- Laplace HadyDocumento50 páginasLaplace HadyIhwan FauziAinda não há avaliações
- CHE 3002-PROCESS INSTRUMENTATION AND CONTROL LECTURE NOTESDocumento16 páginasCHE 3002-PROCESS INSTRUMENTATION AND CONTROL LECTURE NOTESSATHIYANARAYANAN D 15BCM0007Ainda não há avaliações
- Model Matematis Sistem Fisik (Materi 2)Documento47 páginasModel Matematis Sistem Fisik (Materi 2)Refly DariseAinda não há avaliações
- Regulation and Control: by Tewedage SileshiDocumento29 páginasRegulation and Control: by Tewedage SileshiSiraye AbirhamAinda não há avaliações
- IE474 Summer2022 Nise Ch2 PartA PDFDocumento33 páginasIE474 Summer2022 Nise Ch2 PartA PDFAmon SimatwoAinda não há avaliações
- Chapter 3 Laplace TransformDocumento32 páginasChapter 3 Laplace TransformAie Neutral100% (1)
- Introduction To The Laplace Transform: (Chapter 12)Documento79 páginasIntroduction To The Laplace Transform: (Chapter 12)Trần VũAinda não há avaliações
- Mathematical Models of Control SystemsDocumento37 páginasMathematical Models of Control SystemsmorilloatilioAinda não há avaliações
- Module-3 Laplace and Inverse Laplace Transforms PDFDocumento45 páginasModule-3 Laplace and Inverse Laplace Transforms PDFPreetham N KumarAinda não há avaliações
- Ee602 LaplaceDocumento76 páginasEe602 LaplaceRadhi MusaAinda não há avaliações
- Chapter56 Laplace&TFDocumento106 páginasChapter56 Laplace&TFfebri setyawanAinda não há avaliações
- Laplace and Inverse Laplace TransformDocumento96 páginasLaplace and Inverse Laplace Transformgtewszc123Ainda não há avaliações
- Laplace transformDocumento71 páginasLaplace transformsshams5573Ainda não há avaliações
- PC. Lecture 4Documento38 páginasPC. Lecture 4Latisha AnthonyAinda não há avaliações
- Appendix A: Laplace TransformsDocumento11 páginasAppendix A: Laplace TransformsAbdulRhman AL-OmariAinda não há avaliações
- Modeling in Time DomainDocumento30 páginasModeling in Time Domainfarouq_razzaz2574Ainda não há avaliações
- Laplace TransformDocumento95 páginasLaplace Transformkac2872Ainda não há avaliações
- Laplace Transform: Definitions, Transfer FunctionsDocumento58 páginasLaplace Transform: Definitions, Transfer FunctionsheroAinda não há avaliações
- Lecture Guide 3 - Laplace Transformation For Process ControlDocumento17 páginasLecture Guide 3 - Laplace Transformation For Process ControlMariella SingsonAinda não há avaliações
- 2-Mathematical Models of SystemsDocumento42 páginas2-Mathematical Models of SystemsKeiko AzizahAinda não há avaliações
- Chapter 6 PPT Slides vs3Documento22 páginasChapter 6 PPT Slides vs3Sherif Aly100% (1)
- Automatics and Automatic ControlDocumento33 páginasAutomatics and Automatic ControlaliAinda não há avaliações
- LaplaceTransform 1Documento227 páginasLaplaceTransform 1Komborerai MuvhiringiAinda não há avaliações
- Laplace Transforms: Spsu Mathematics DepartmentDocumento37 páginasLaplace Transforms: Spsu Mathematics DepartmentVinith GandhiAinda não há avaliações
- Process Control 7Documento45 páginasProcess Control 7ali AbbasAinda não há avaliações
- MAT231BT - Laplace TransformsDocumento25 páginasMAT231BT - Laplace TransformsRochakAinda não há avaliações
- Ee202laplacetransform PDFDocumento85 páginasEe202laplacetransform PDFFairusabdrAinda não há avaliações
- Laplace Transform Solves Differential EquationsDocumento27 páginasLaplace Transform Solves Differential EquationsFarooq AhmadAinda não há avaliações
- LaplaceDocumento173 páginasLaplaceOscar Brian OscarOAinda não há avaliações
- Laplace Transforms ExplainedDocumento20 páginasLaplace Transforms ExplainedchequillasAinda não há avaliações
- Notes Laplace1Documento10 páginasNotes Laplace1x moodAinda não há avaliações
- Laplace Transform Chapter 1 IntroductionDocumento28 páginasLaplace Transform Chapter 1 IntroductionMohammed NabilAinda não há avaliações
- Ch15_Laplace Transforms IDocumento45 páginasCh15_Laplace Transforms IdadsdAinda não há avaliações
- Laplace Transform Applications in Various FieldsDocumento47 páginasLaplace Transform Applications in Various Fieldsjucar fernandezAinda não há avaliações
- 02 Chapter 02Documento60 páginas02 Chapter 02Get CubeloAinda não há avaliações
- Laplace Transforms: Pierre - Simon Laplace Born: DiedDocumento23 páginasLaplace Transforms: Pierre - Simon Laplace Born: DiedTanvir AhmedAinda não há avaliações
- Introduction to Laplace Transforms for Solving Differential EquationsDocumento47 páginasIntroduction to Laplace Transforms for Solving Differential EquationsTalha MazharAinda não há avaliações
- EE234 - Lec 2 - Laplace TransformsDocumento53 páginasEE234 - Lec 2 - Laplace TransformsGuira JeromeAinda não há avaliações
- Unit-III Laplace TransformDocumento30 páginasUnit-III Laplace TransformRochakAinda não há avaliações
- Laplace and Its Inverse Transform - Unit - Iii - Iv MaterialsDocumento49 páginasLaplace and Its Inverse Transform - Unit - Iii - Iv MaterialsSupratim RoyAinda não há avaliações
- Laplace Transform Chapter SummaryDocumento29 páginasLaplace Transform Chapter SummaryTekdAinda não há avaliações
- Chapter 3: Dynamic ResponseDocumento78 páginasChapter 3: Dynamic ResponseAhmedSalahAinda não há avaliações
- LksmssaplaceDocumento43 páginasLksmssaplaceNakuAinda não há avaliações
- LaplaceDocumento43 páginasLaplaceNakuAinda não há avaliações
- Lecture1-2 - 14704 - Lecture1-2 - 17822 - Laplace TransformDocumento30 páginasLecture1-2 - 14704 - Lecture1-2 - 17822 - Laplace Transformanuj jainAinda não há avaliações
- 5 - Laplace TransformDocumento58 páginas5 - Laplace TransformutpAinda não há avaliações
- Lesson #2 Lecture #1 Review of Laplace TransformDocumento16 páginasLesson #2 Lecture #1 Review of Laplace TransformShazidAinda não há avaliações
- Bab 2 Transformasi LaplaceDocumento31 páginasBab 2 Transformasi LaplaceRizqi Cahyo M PutraAinda não há avaliações
- ENGR 3621 Advanced Engineering Mathematics: and Its Use in Engineering/physics ProblemsDocumento50 páginasENGR 3621 Advanced Engineering Mathematics: and Its Use in Engineering/physics ProblemsEngr Umer CheemaAinda não há avaliações
- Review of Laplace Transform and Its Applications in Mechanical Engineering AnalysisDocumento39 páginasReview of Laplace Transform and Its Applications in Mechanical Engineering AnalysisMathematics PointAinda não há avaliações
- Chapter 2Documento27 páginasChapter 2AhmadJaffarGulfarazAinda não há avaliações
- LaplaceDocumento22 páginasLaplaceKomal SinghAinda não há avaliações
- Unit-Vi: Mathematics-II (7HC16)Documento32 páginasUnit-Vi: Mathematics-II (7HC16)Kola KeerthanaAinda não há avaliações
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99Ainda não há avaliações
- 1 s2.0 S0021951713003734 MainDocumento9 páginas1 s2.0 S0021951713003734 Main李承家Ainda não há avaliações
- Carbon Monoxide As A Selective Reducing Agent in Organic ChemistryDocumento10 páginasCarbon Monoxide As A Selective Reducing Agent in Organic Chemistry李承家Ainda não há avaliações
- Raman Microspectroscopy of Soot and Related Carbonaceous Materials. Spectral Analysis and Structural Information PDFDocumento12 páginasRaman Microspectroscopy of Soot and Related Carbonaceous Materials. Spectral Analysis and Structural Information PDFDavidAinda não há avaliações
- Synthesis, Characterization and Microwave Absorption Properties of Dendrite-Like Fe O Embedded Within Amorphous Sugar Carbon MatrixDocumento10 páginasSynthesis, Characterization and Microwave Absorption Properties of Dendrite-Like Fe O Embedded Within Amorphous Sugar Carbon Matrix李承家Ainda não há avaliações
- Oxygen Pathways in Oxidative Coupling of Methane and Related ProcessesDocumento11 páginasOxygen Pathways in Oxidative Coupling of Methane and Related Processes李承家Ainda não há avaliações
- Introduction to IC Fabrication ProcessesDocumento19 páginasIntroduction to IC Fabrication Processes李承家Ainda não há avaliações
- Studies On Oxidative Coupling of Methane UsingDocumento14 páginasStudies On Oxidative Coupling of Methane Using李承家Ainda não há avaliações
- Catalysts 04 00226Documento30 páginasCatalysts 04 00226李承家100% (1)
- Problem Set 4.5: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - EdDocumento8 páginasProblem Set 4.5: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - Ed李承家Ainda não há avaliações
- Applied Catalysis A: General: Wei Di, Jihong Cheng, Shuxun Tian, Jing Li, Jingyun Chen, Qi SunDocumento16 páginasApplied Catalysis A: General: Wei Di, Jihong Cheng, Shuxun Tian, Jing Li, Jingyun Chen, Qi Sun李承家Ainda não há avaliações
- Advances and Innovations of Heterogeneous Catalysis - v2 (YCL)Documento15 páginasAdvances and Innovations of Heterogeneous Catalysis - v2 (YCL)李承家Ainda não há avaliações
- Problem Set 4.4: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - EdDocumento18 páginasProblem Set 4.4: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - Ed李承家Ainda não há avaliações
- Chapter 14Documento6 páginasChapter 14李承家Ainda não há avaliações
- Problem Set 4.3: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - EdDocumento15 páginasProblem Set 4.3: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - Ed李承家Ainda não há avaliações
- Chapter 13Documento16 páginasChapter 13李承家Ainda não há avaliações
- Chapter 5Documento20 páginasChapter 5Ana PereiraAinda não há avaliações
- Problem Set 4.3: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - EdDocumento15 páginasProblem Set 4.3: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - Ed李承家Ainda não há avaliações
- Control System Instrumentation: Transducers and TransmittersDocumento7 páginasControl System Instrumentation: Transducers and Transmitters李承家Ainda não há avaliações
- Chapter 10Documento13 páginasChapter 10李承家Ainda não há avaliações
- Chapter 13Documento16 páginasChapter 13李承家Ainda não há avaliações
- More General Transfer Function Models: Bs Gs AsDocumento21 páginasMore General Transfer Function Models: Bs Gs As李承家Ainda não há avaliações
- Transfer Function Models: Development of Transfer FunctionsDocumento16 páginasTransfer Function Models: Development of Transfer Functions李承家Ainda não há avaliações
- Control System Instrumentation: Transducers and TransmittersDocumento7 páginasControl System Instrumentation: Transducers and Transmitters李承家Ainda não há avaliações
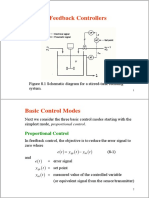
- Feedback Controllers ExplainedDocumento14 páginasFeedback Controllers Explained李承家Ainda não há avaliações
- Development of Empirical Models From Process Data: - An Attractive AlternativeDocumento10 páginasDevelopment of Empirical Models From Process Data: - An Attractive Alternative李承家Ainda não há avaliações
- Introduction To Process ControlDocumento16 páginasIntroduction To Process Control李承家Ainda não há avaliações
- Theoretical Models of CH Ilp Chemical ProcessesDocumento14 páginasTheoretical Models of CH Ilp Chemical Processes李承家Ainda não há avaliações
- Introduction To Process ControlDocumento16 páginasIntroduction To Process Control李承家Ainda não há avaliações
- Design and Analysis of AlgorithmsDocumento23 páginasDesign and Analysis of Algorithmsgopelaw218Ainda não há avaliações
- Daa Lab File ItDocumento34 páginasDaa Lab File Itashsingh536Ainda não há avaliações
- Age and Gender DetectionDocumento13 páginasAge and Gender DetectionAnurupa bhartiAinda não há avaliações
- Cha 02Documento45 páginasCha 02muhabamohamed21Ainda não há avaliações
- Correlation and RegressionDocumento8 páginasCorrelation and RegressionMD AL-AMINAinda não há avaliações
- Adaptive Controller Example 101 PDFDocumento5 páginasAdaptive Controller Example 101 PDFMUHAMMAD USMAN KhalidAinda não há avaliações
- Assignment4-NIT CALICUT DSADocumento7 páginasAssignment4-NIT CALICUT DSAJ AnanthakrishnanAinda não há avaliações
- Or-Week 2 - Introduction To LP - Simplex MethodDocumento31 páginasOr-Week 2 - Introduction To LP - Simplex MethodMadina MukhamejanAinda não há avaliações
- Bitcoin ScroogeCoin transactionsDocumento3 páginasBitcoin ScroogeCoin transactionsAnil ShekarAinda não há avaliações
- Research Paper On Support Vector MachineDocumento6 páginasResearch Paper On Support Vector Machinepoypdibkf100% (1)
- Anchor-Based Vs Anchor-Free ObjectDocumento8 páginasAnchor-Based Vs Anchor-Free Objectsobuz visualAinda não há avaliações
- Multicriteria Decision Making: Analytical Hierarchy ProcessesDocumento20 páginasMulticriteria Decision Making: Analytical Hierarchy ProcessesmohsinyazdaniAinda não há avaliações
- Take Home Examination QBM101 (Set R) PDFDocumento5 páginasTake Home Examination QBM101 (Set R) PDFIkramAinda não há avaliações
- FoC HW1 2024Documento2 páginasFoC HW1 2024T MAinda não há avaliações
- Computer Vision - ECCV 2008Documento911 páginasComputer Vision - ECCV 2008etwefwsAinda não há avaliações
- CMDocumento5 páginasCMthanseelnnAinda não há avaliações
- Vibration Reduction of Gantry Crane Loads Using FIR FiltersDocumento7 páginasVibration Reduction of Gantry Crane Loads Using FIR FiltersHosseinAinda não há avaliações
- Notes of Soft ComputingDocumento2 páginasNotes of Soft Computingshardapatel100% (1)
- Gapso PDFDocumento6 páginasGapso PDFPranata AgriawanAinda não há avaliações
- Mqsensorlib V2.0: 03/2020 by Miguel Califa - Yersson Carrillo - Ghiordy ContrerasDocumento16 páginasMqsensorlib V2.0: 03/2020 by Miguel Califa - Yersson Carrillo - Ghiordy ContrerasJh Kurth Laura QueteguariAinda não há avaliações
- Computer Based Numerical and Statistical TechniquesDocumento3 páginasComputer Based Numerical and Statistical Techniquesmohdafaq100% (1)
- Euclidean Field Theory: Kasper Peeters & Marija ZamaklarDocumento41 páginasEuclidean Field Theory: Kasper Peeters & Marija ZamaklarSourav Sen ChoudhuryAinda não há avaliações
- Assignment 1: Solving Bloxorz Using Search: Due Sunday, 1 November, 11pmDocumento2 páginasAssignment 1: Solving Bloxorz Using Search: Due Sunday, 1 November, 11pmMehmet BaşaranAinda não há avaliações
- Exercises With Solutions PDFDocumento37 páginasExercises With Solutions PDFFakadaAinda não há avaliações
- Inverse Problem For A Space-Time Generalized Diffusion EquationDocumento12 páginasInverse Problem For A Space-Time Generalized Diffusion EquationkamranAinda não há avaliações
- Differential EquationDocumento58 páginasDifferential Equationreza hariansyahAinda não há avaliações
- The Minimax Algorithm ExplainedDocumento5 páginasThe Minimax Algorithm ExplainedXâlmañ KháñAinda não há avaliações
- Team9 Lab3Documento29 páginasTeam9 Lab3thienngo17092003Ainda não há avaliações