Você também pode gostar
- Chapter 1: Introduction To Process Control: at The End of Today's Lecture, You Will Understand The FollowingDocumento35 páginasChapter 1: Introduction To Process Control: at The End of Today's Lecture, You Will Understand The FollowingaliAinda não há avaliações
- Introduction To Process Control: at The End of Today's Lecture, You Will Understand The FollowingDocumento35 páginasIntroduction To Process Control: at The End of Today's Lecture, You Will Understand The FollowingaaaAinda não há avaliações
- Introduction To Process ControlDocumento29 páginasIntroduction To Process ControlSalih Ahmed ObeidAinda não há avaliações
- Introduction To Process ControlDocumento28 páginasIntroduction To Process ControlFajar AdityadarmaAinda não há avaliações
- Process Control NotesDocumento30 páginasProcess Control NotesRyle ArbonAinda não há avaliações
- Process Dynamics and Control - IntroductionDocumento35 páginasProcess Dynamics and Control - IntroductionMarie Angeline BautistaAinda não há avaliações
- Introduction To Process ControlDocumento30 páginasIntroduction To Process ControlnadyahginiceAinda não há avaliações
- Chapter 1Documento27 páginasChapter 1Izzat FakhriAinda não há avaliações
- Process Control IntroDocumento21 páginasProcess Control Introحاتم غيدان خلفAinda não há avaliações
- Process Dynamics and Control Chapter - 1Documento44 páginasProcess Dynamics and Control Chapter - 1MustafaAinda não há avaliações
- Chapter 1Documento102 páginasChapter 1Anonymous EBReO8vAinda não há avaliações
- Chapter 1Documento30 páginasChapter 1julior87Ainda não há avaliações
- Chapter - 1 - Introduction To Process ControlDocumento40 páginasChapter - 1 - Introduction To Process ControlSuraya JohariAinda não há avaliações
- Chapter 1Documento17 páginasChapter 1Ahmed Hassan RashedAinda não há avaliações
- l1c1 PC TMR Fall23Documento28 páginasl1c1 PC TMR Fall23zubairnaeem 92Ainda não há avaliações
- HCHE 322 Lecture 1 - IntroductionDocumento8 páginasHCHE 322 Lecture 1 - IntroductionBrian MasauliAinda não há avaliações
- Seborg Process Control Chapter 1Documento50 páginasSeborg Process Control Chapter 1Tanvir AhmedAinda não há avaliações
- Lec 2 ExampleDocumento9 páginasLec 2 ExamplemmAinda não há avaliações
- Dynamics. Openloop Closedloop: ZyxwvutsrqponmlkjihgfedcbazyxwvutsrqponmlkjihgfedcbaDocumento4 páginasDynamics. Openloop Closedloop: ZyxwvutsrqponmlkjihgfedcbazyxwvutsrqponmlkjihgfedcbalordyAinda não há avaliações
- Designing Controls For The Process Industries 1st Seames Solution ManualDocumento11 páginasDesigning Controls For The Process Industries 1st Seames Solution Manualemilymurphyyxcesaopbz100% (36)
- Process Dynamics & Control: TextbookDocumento16 páginasProcess Dynamics & Control: TextbookMohammed FaiqAinda não há avaliações
- Designing Controls For The Process Industries 1st Seames Solution ManualDocumento36 páginasDesigning Controls For The Process Industries 1st Seames Solution Manualunlimberwisdomhn3scy100% (34)
- Full Download Designing Controls For The Process Industries 1st Seames Solution Manual PDF Full ChapterDocumento36 páginasFull Download Designing Controls For The Process Industries 1st Seames Solution Manual PDF Full Chapterhennerygoldintn670100% (17)
- 14 12 31 10 44 12 2935 ElamuruganDocumento23 páginas14 12 31 10 44 12 2935 ElamurugankedharAinda não há avaliações
- PClesson 01 IntroDocumento4 páginasPClesson 01 IntroBhabanirajasAinda não há avaliações
- PC Lessons On Process ControlDocumento156 páginasPC Lessons On Process ControlNsidibe Michael EtimAinda não há avaliações
- Introduction To Process Instrumentation & ControlDocumento44 páginasIntroduction To Process Instrumentation & ControlMasrihan Abu HasanAinda não há avaliações
- Process Control Two Mark Questions PDFDocumento20 páginasProcess Control Two Mark Questions PDFYouTube YouTube vancedAinda não há avaliações
- Introduction To Process ControlDocumento48 páginasIntroduction To Process ControlYi Ling GohAinda não há avaliações
- Lecture-5 - Classification of Process Variables - Control StrategiesDocumento18 páginasLecture-5 - Classification of Process Variables - Control StrategiesKshitij SoniAinda não há avaliações
- PDC Compilation PDFDocumento87 páginasPDC Compilation PDFScrappy WellAinda não há avaliações
- Multi Variable ControlsDocumento17 páginasMulti Variable ControlsJivashiniBalasupurManiamAinda não há avaliações
- Controller Tuning: Dr. Nagajyothi VirivintiDocumento23 páginasController Tuning: Dr. Nagajyothi VirivintiNagajyothiVirivintiAinda não há avaliações
- Control Inrtroduction ADocumento48 páginasControl Inrtroduction Arhm 018Ainda não há avaliações
- Basic Concepts Terminology and Techniques For Process ControlDocumento9 páginasBasic Concepts Terminology and Techniques For Process ControlPaula Daniela Andrade SànchezAinda não há avaliações
- Process Control NotesDocumento178 páginasProcess Control Notesabdulrhman aljuaydi100% (1)
- Savana Process Control PDFDocumento183 páginasSavana Process Control PDFSharon Yanireth Castro PaganAinda não há avaliações
- Feed-Forward and Ratio Control: CHME 624 Advance Process Dynamic Modelling & ControlDocumento13 páginasFeed-Forward and Ratio Control: CHME 624 Advance Process Dynamic Modelling & Controlali aljifriAinda não há avaliações
- Class Rules: CENG 4120: Process Dynamics and ControlDocumento14 páginasClass Rules: CENG 4120: Process Dynamics and ControlIvan ChanAinda não há avaliações
- 1 Control Pres 1Documento27 páginas1 Control Pres 1Ahmed ShabanAinda não há avaliações
- Coupled Tank - MPCDocumento6 páginasCoupled Tank - MPCMutiara PurnamaAinda não há avaliações
- Process Control Fundamentals - ADDDocumento115 páginasProcess Control Fundamentals - ADDAsifAinda não há avaliações
- Control System TechnologyDocumento106 páginasControl System TechnologyRisimic NebojsaAinda não há avaliações
- Slides CPC PDFDocumento536 páginasSlides CPC PDFJam imtiaz100% (1)
- Process Control 3Documento18 páginasProcess Control 3jeedAinda não há avaliações
- Chapter 1 - IntroductionDocumento49 páginasChapter 1 - IntroductionFakhrulShahrilEzanieAinda não há avaliações
- Tutorial Sol CH 9Documento11 páginasTutorial Sol CH 9Sameer BitthariaAinda não há avaliações
- Chemical Process Variables-1Documento48 páginasChemical Process Variables-1NARE EDMUNDAinda não há avaliações
- Process Instrumentation, Dynamics and ControlDocumento23 páginasProcess Instrumentation, Dynamics and ControlLavanya ManoharanAinda não há avaliações
- Presentation 4 - January 2019Documento35 páginasPresentation 4 - January 2019Muavha MadembeAinda não há avaliações
- Ind Process ControlDocumento12 páginasInd Process ControlMamnoon Akhter SyedAinda não há avaliações
- Ic1352 - Process Control-2 MarksDocumento21 páginasIc1352 - Process Control-2 MarksKaushal Kishor100% (1)
- Lecture-6 - Control Stratefgies-Steps in Design of Control SystemDocumento24 páginasLecture-6 - Control Stratefgies-Steps in Design of Control SystemKshitij SoniAinda não há avaliações
- DCsummary 1Documento5 páginasDCsummary 1khin muyar ayeAinda não há avaliações
- IPC Week 1 19022024 113005amDocumento45 páginasIPC Week 1 19022024 113005amfatmanasir284Ainda não há avaliações
- Control Systems CH1Documento12 páginasControl Systems CH1kkefeingeAinda não há avaliações
- cpc6 Larsson TeDocumento5 páginascpc6 Larsson TeSergio OrtizAinda não há avaliações
- Robust Industrial Control Systems: Optimal Design Approach for Polynomial SystemsNo EverandRobust Industrial Control Systems: Optimal Design Approach for Polynomial SystemsAinda não há avaliações
- Synthesis, Characterization and Microwave Absorption Properties of Dendrite-Like Fe O Embedded Within Amorphous Sugar Carbon MatrixDocumento10 páginasSynthesis, Characterization and Microwave Absorption Properties of Dendrite-Like Fe O Embedded Within Amorphous Sugar Carbon Matrix李承家Ainda não há avaliações
- Problem Set 4.5: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - EdDocumento8 páginasProblem Set 4.5: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - Ed李承家Ainda não há avaliações
- Carbon Monoxide As A Selective Reducing Agent in Organic ChemistryDocumento10 páginasCarbon Monoxide As A Selective Reducing Agent in Organic Chemistry李承家Ainda não há avaliações
- Applied Catalysis A: General: Wei Di, Jihong Cheng, Shuxun Tian, Jing Li, Jingyun Chen, Qi SunDocumento16 páginasApplied Catalysis A: General: Wei Di, Jihong Cheng, Shuxun Tian, Jing Li, Jingyun Chen, Qi Sun李承家Ainda não há avaliações
- 1 s2.0 S0021951713003734 MainDocumento9 páginas1 s2.0 S0021951713003734 Main李承家Ainda não há avaliações
- Problem Set 4.3: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - EdDocumento15 páginasProblem Set 4.3: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - Ed李承家Ainda não há avaliações
- Problem Set 4.4: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - EdDocumento18 páginasProblem Set 4.4: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - Ed李承家Ainda não há avaliações
- Chapter 3 Semiconductor Basics and Wafer ManufacturingDocumento44 páginasChapter 3 Semiconductor Basics and Wafer Manufacturing李承家Ainda não há avaliações
- Chapter 2 Introduction To Integrated Circuit FabricationDocumento19 páginasChapter 2 Introduction To Integrated Circuit Fabrication李承家Ainda não há avaliações
- Problem Set 4.3: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - EdDocumento15 páginasProblem Set 4.3: Advanced Engineering Mathematics, by Erwin Kreyszig 10 - Ed李承家Ainda não há avaliações
- Transfer Function Models: Development of Transfer FunctionsDocumento16 páginasTransfer Function Models: Development of Transfer Functions李承家Ainda não há avaliações
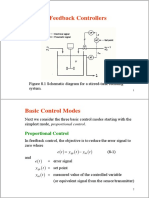
- Feedback Controllers: Proportional ControlDocumento14 páginasFeedback Controllers: Proportional Control李承家Ainda não há avaliações
- Chapter 14Documento6 páginasChapter 14李承家Ainda não há avaliações
- Chapter 13Documento16 páginasChapter 13李承家Ainda não há avaliações
- Development of Empirical Models From Process Data: - An Attractive AlternativeDocumento10 páginasDevelopment of Empirical Models From Process Data: - An Attractive Alternative李承家Ainda não há avaliações
- Control System Instrumentation: Transducers and TransmittersDocumento7 páginasControl System Instrumentation: Transducers and Transmitters李承家Ainda não há avaliações
- Chapter 10Documento13 páginasChapter 10李承家Ainda não há avaliações
- More General Transfer Function Models: Bs Gs AsDocumento21 páginasMore General Transfer Function Models: Bs Gs As李承家Ainda não há avaliações
- Theoretical Models of CH Ilp Chemical ProcessesDocumento14 páginasTheoretical Models of CH Ilp Chemical Processes李承家Ainda não há avaliações
- Laplace Transforms: LinearDocumento11 páginasLaplace Transforms: Linear李承家Ainda não há avaliações
- SM Chapter 17Documento40 páginasSM Chapter 17李承家Ainda não há avaliações
- SM Chapter 16 PDFDocumento45 páginasSM Chapter 16 PDF李承家Ainda não há avaliações
- SM Chapter 15Documento51 páginasSM Chapter 15李承家Ainda não há avaliações
- Chapter 2 Practice AnswersDocumento4 páginasChapter 2 Practice AnswersZeyad Moustafa100% (1)
- Assignments 1 SolutionDocumento6 páginasAssignments 1 SolutionAtif Ali100% (1)
- Structure of Linear Programming ProblemDocumento4 páginasStructure of Linear Programming ProblemKishor Patel67% (6)
- Aminpro Addin Guide 1.2-1Documento16 páginasAminpro Addin Guide 1.2-1John Calero OrtegaAinda não há avaliações
- Xercise: Single Correct (Objective Questions)Documento5 páginasXercise: Single Correct (Objective Questions)Aryan DuttaAinda não há avaliações
- G5 Q3 Quiz2Documento1 páginaG5 Q3 Quiz2Precious Anne GalangAinda não há avaliações
- Pragnya de 4Documento5 páginasPragnya de 4Pragnya RajAinda não há avaliações
- PW 05 Object Oriented ProgrammingDocumento28 páginasPW 05 Object Oriented ProgrammingyahyaAinda não há avaliações
- Wave Mechanics 8Documento9 páginasWave Mechanics 8DeanielAinda não há avaliações
- MANASCI term3AY12-13Documento6 páginasMANASCI term3AY12-13carlo21495Ainda não há avaliações
- A Comparative Analysis of Sift Surf Kaze Akaze Orb and BriskDocumento10 páginasA Comparative Analysis of Sift Surf Kaze Akaze Orb and Briskminu samantarayAinda não há avaliações
- 3.5 Inverse Trig FunctionsDocumento6 páginas3.5 Inverse Trig FunctionsZazliana Izatti100% (1)
- RESEARCH WORK 2 AlejandroDocumento28 páginasRESEARCH WORK 2 AlejandroAngelica AlejandroAinda não há avaliações
- Assignment 2Documento7 páginasAssignment 2Abhijeet BoseAinda não há avaliações
- Web Traffic Time Series Forecasting: Kaggle Competition Review Bill Tubbs July 26, 2018Documento39 páginasWeb Traffic Time Series Forecasting: Kaggle Competition Review Bill Tubbs July 26, 2018do minh tienAinda não há avaliações
- Solving Accelerated Motion ProblemsDocumento23 páginasSolving Accelerated Motion ProblemsrhazoorAinda não há avaliações
- Park - Fundamentals of Engineering Economics - 2nd Edition - Solution Manual - ch2Documento15 páginasPark - Fundamentals of Engineering Economics - 2nd Edition - Solution Manual - ch2Mobin Akhand50% (6)
- For GATE and Computer General Knowledge Questions AnswersDocumento13 páginasFor GATE and Computer General Knowledge Questions Answersseeralan balakrishnanAinda não há avaliações
- Algorithms - Chapter 1 IntroDocumento23 páginasAlgorithms - Chapter 1 IntroSx69Ainda não há avaliações
- Pengembangan Instrumen Tes Untuk Mengukur Kemampuan Berpikir Komputasi SiswaDocumento10 páginasPengembangan Instrumen Tes Untuk Mengukur Kemampuan Berpikir Komputasi Siswaaliidrus2602Ainda não há avaliações
- The Sine Rule Worksheet #01, Shape & Space Revision From GCSE Maths TutorDocumento2 páginasThe Sine Rule Worksheet #01, Shape & Space Revision From GCSE Maths TutorgcsemathstutorAinda não há avaliações
- Filesdocuments6886c86c 6f69 4da0 849b Dfd973c85eeb PDFDocumento12 páginasFilesdocuments6886c86c 6f69 4da0 849b Dfd973c85eeb PDFJana HaithamAinda não há avaliações
- 2 Sampling and Sampling TechniquesDocumento73 páginas2 Sampling and Sampling TechniquesJozen RyanAinda não há avaliações
- Grejner Brzezinska2001Documento9 páginasGrejner Brzezinska2001mainking2003Ainda não há avaliações
- G-Sonique Ultrabass MX44 VSTi v1.0 MERRY XMAS ASSiGN International Software Crack DownloadDocumento1 páginaG-Sonique Ultrabass MX44 VSTi v1.0 MERRY XMAS ASSiGN International Software Crack DownloadMegatore0% (1)
- mpm2d1 Course Overview 2017Documento2 páginasmpm2d1 Course Overview 2017api-235072058Ainda não há avaliações
- Piping & Instrumentation DiagramsDocumento19 páginasPiping & Instrumentation Diagramsian ridz100% (1)
- Statistics For Managers Using Microsoft Excel: 6 Global EditionDocumento53 páginasStatistics For Managers Using Microsoft Excel: 6 Global Edition015Devina UlimaAinda não há avaliações
- Analysis of Factor Using Rasch Model FINAL - VERDocumento11 páginasAnalysis of Factor Using Rasch Model FINAL - VERAhmad Wiraputra SelamatAinda não há avaliações
- Bergonzi System - 4 Intervals MelodiesDocumento7 páginasBergonzi System - 4 Intervals MelodiessmikmixAinda não há avaliações