Você também pode gostar
- Perennial Psychology of The Bhagavad-Gita-Swami Rama PDFDocumento454 páginasPerennial Psychology of The Bhagavad-Gita-Swami Rama PDFcivaas100% (7)
- TB 60 Repair Parts PDFDocumento282 páginasTB 60 Repair Parts PDFvatasa100% (2)
- The New Art of Photographing Nature - ExcerptDocumento15 páginasThe New Art of Photographing Nature - ExcerptCrown Publishing GroupAinda não há avaliações
- Adrian Bardon - A Brief History of The Philosophy of Time (2013) (A) PDFDocumento198 páginasAdrian Bardon - A Brief History of The Philosophy of Time (2013) (A) PDFAdriana Matos100% (1)
- A Brief History of Infinity-Brian CleggDocumento141 páginasA Brief History of Infinity-Brian Cleggcivaas100% (4)
- API RP 7C-11F Installation, Maintenance and Operation of Internal Combustion Engines.Documento3 páginasAPI RP 7C-11F Installation, Maintenance and Operation of Internal Combustion Engines.Rashid Ghani100% (1)
- Economics Exam Technique GuideDocumento21 páginasEconomics Exam Technique Guidemalcewan100% (5)
- D WT HT e DT: AnswerDocumento21 páginasD WT HT e DT: AnswerAshirbad SahuAinda não há avaliações
- Control Most Impo FileDocumento72 páginasControl Most Impo FileSumit BahlAinda não há avaliações
- Be Winter 2022Documento2 páginasBe Winter 2022avinashlimje0Ainda não há avaliações
- Worked Problems Ch13Documento6 páginasWorked Problems Ch13KaradiasAinda não há avaliações
- Exam in Course 43917 Multivariable Control Using Frequency Domain MethodsDocumento2 páginasExam in Course 43917 Multivariable Control Using Frequency Domain MethodsAnonymous AFFiZnAinda não há avaliações
- HW9 SolutionsDocumento5 páginasHW9 SolutionsAndreas mAinda não há avaliações
- ADSP Sp2022 Assign1Documento3 páginasADSP Sp2022 Assign1nayyabAinda não há avaliações
- Homework 1Documento2 páginasHomework 1Vu LeAinda não há avaliações
- Lecture29 PDFDocumento6 páginasLecture29 PDFSurangaGAinda não há avaliações
- 246 Sample ChapterDocumento24 páginas246 Sample ChapterAhmed SaidAinda não há avaliações
- Solution To HW9Documento11 páginasSolution To HW9Andreina BallunoAinda não há avaliações
- Chapter 5 HW Solution: Review QuestionsDocumento6 páginasChapter 5 HW Solution: Review QuestionslgAinda não há avaliações
- Lec 5Documento31 páginasLec 5adasdsdadAinda não há avaliações
- EAC533 - LCS - Assignment I QuestionDocumento2 páginasEAC533 - LCS - Assignment I Questionmeseret sisayAinda não há avaliações
- EE 351 Spring 2021 Homework 4 SolutionsDocumento3 páginasEE 351 Spring 2021 Homework 4 SolutionsKalenAinda não há avaliações
- Assignment 1Documento2 páginasAssignment 1Joe NguyenAinda não há avaliações
- Quiz 1 Control SolDocumento13 páginasQuiz 1 Control Soldjun033Ainda não há avaliações
- Sistemas de Control para El Desarrollo de IngenieríaDocumento23 páginasSistemas de Control para El Desarrollo de IngenieríajesusAinda não há avaliações
- EE342 Spring 2007 Midterm ExamDocumento4 páginasEE342 Spring 2007 Midterm Examtt esAinda não há avaliações
- EEET2109 MST 2014 Answers PDFDocumento4 páginasEEET2109 MST 2014 Answers PDFCollin lcwAinda não há avaliações
- Be Winter 2018Documento2 páginasBe Winter 2018Shreya SinghAinda não há avaliações
- Solution To HW3Documento9 páginasSolution To HW3AthonioMourinhoAinda não há avaliações
- R05010102 Mathematics IDocumento8 páginasR05010102 Mathematics ImissiondangerousAinda não há avaliações
- Solutions To Selected Problems in Chapter 5: 1 Problem 5.1Documento13 páginasSolutions To Selected Problems in Chapter 5: 1 Problem 5.1Ian RidzuanAinda não há avaliações
- 05ControlSystems Sol 1651Documento19 páginas05ControlSystems Sol 1651amithbaluAinda não há avaliações
- Math 241 Makeup Exam Fall 2007: NameDocumento13 páginasMath 241 Makeup Exam Fall 2007: Namejadest6Ainda não há avaliações
- Lag Comp Ensator Design Using Root: Ob JectivesDocumento8 páginasLag Comp Ensator Design Using Root: Ob JectivesProf HaryAinda não há avaliações
- EE250 PS04 SolutionDocumento13 páginasEE250 PS04 SolutionUJJAWAL GAMERAinda não há avaliações
- EEE3001 Software ManualDocumento34 páginasEEE3001 Software ManualManuDubeyAinda não há avaliações
- JEE Advanced 2017 P-2Documento39 páginasJEE Advanced 2017 P-2CanopusAinda não há avaliações
- Final Sample SolDocumento8 páginasFinal Sample SolGeorge KiharaAinda não há avaliações
- ChemE 2007 - HW5 - Due - Nov15Documento2 páginasChemE 2007 - HW5 - Due - Nov15李禹羲Ainda não há avaliações
- HW1 SolutionsDocumento3 páginasHW1 SolutionsMuhammad AbubakerAinda não há avaliações
- Problem Set 6 Sol Probability DistributionsDocumento7 páginasProblem Set 6 Sol Probability DistributionsSudipta GhoshAinda não há avaliações
- HwsDocumento9 páginasHwshudha69Ainda não há avaliações
- HW 5 SolDocumento10 páginasHW 5 SolPedroAinda não há avaliações
- Term End Examination - May 2013 Course: MAT101 - Multivariable Calculus and Differential Equations Slot: F2+TF2 Class NBR: 3461 Time: Three Hours Max - Marks:100Documento2 páginasTerm End Examination - May 2013 Course: MAT101 - Multivariable Calculus and Differential Equations Slot: F2+TF2 Class NBR: 3461 Time: Three Hours Max - Marks:100Pratyush MishraAinda não há avaliações
- Express The Following As A Product of Disjoint Cycles, Then Compute Its Order.Documento9 páginasExpress The Following As A Product of Disjoint Cycles, Then Compute Its Order.Nehal AnuragAinda não há avaliações
- Rabino Lineth B Activity-8 ConsyslabDocumento13 páginasRabino Lineth B Activity-8 ConsyslabLineth RabinoAinda não há avaliações
- ME 380 Chapter 2 HW Solution: Review QuestionsDocumento5 páginasME 380 Chapter 2 HW Solution: Review QuestionsVisakan ParameswaranAinda não há avaliações
- 6.003 Homework 3: ProblemsDocumento4 páginas6.003 Homework 3: ProblemsIsrael SmithAinda não há avaliações
- Solution To HW5Documento13 páginasSolution To HW5OmarWaelAinda não há avaliações
- Digital Sheet SPC 512 Spring 2018Documento10 páginasDigital Sheet SPC 512 Spring 2018AhmedAinda não há avaliações
- Exam in Engineering Math For EEDocumento2 páginasExam in Engineering Math For EEPiolo Vincent FernandezAinda não há avaliações
- Homework 6 - SolutionsDocumento9 páginasHomework 6 - SolutionsAztvAinda não há avaliações
- MAT391 EXAM KEY (November 2022)Documento11 páginasMAT391 EXAM KEY (November 2022)lisamundanga84Ainda não há avaliações
- Time Response PDFDocumento104 páginasTime Response PDFMeshach KumarAinda não há avaliações
- MTH517 WK 4 LabDocumento3 páginasMTH517 WK 4 LabShavin ChandAinda não há avaliações
- Suggested Solution To Past Papers PDFDocumento20 páginasSuggested Solution To Past Papers PDFMgla AngelAinda não há avaliações
- Practice #3: Sys ZPK (Z, P, K)Documento5 páginasPractice #3: Sys ZPK (Z, P, K)Kaneki kenAinda não há avaliações
- Assignment 4Documento4 páginasAssignment 4PaperCurlAinda não há avaliações
- Chapter 8 HW Solution: Review QuestionsDocumento11 páginasChapter 8 HW Solution: Review QuestionsAsseel FleihanAinda não há avaliações
- Major SolsDocumento4 páginasMajor SolsSumit BahlAinda não há avaliações
- Problems in Elementary Number TheoryDocumento43 páginasProblems in Elementary Number TheorymexicoconutAinda não há avaliações
- EE 312 Lecture 2Documento8 páginasEE 312 Lecture 2دكتور كونوهاAinda não há avaliações
- Week 2 Assignment PDFDocumento4 páginasWeek 2 Assignment PDFGanesh RadharamAinda não há avaliações
- Answers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesNo EverandAnswers to Selected Problems in Multivariable Calculus with Linear Algebra and SeriesNota: 1.5 de 5 estrelas1.5/5 (2)
- Trigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsNo EverandTrigonometric Ratios to Transformations (Trigonometry) Mathematics E-Book For Public ExamsNota: 5 de 5 estrelas5/5 (1)
- India's Princely States-Waltraud ErnstDocumento274 páginasIndia's Princely States-Waltraud ErnstcivaasAinda não há avaliações
- Winston - Churchill To Academic YouthDocumento3 páginasWinston - Churchill To Academic YouthcivaasAinda não há avaliações
- Civil Engineering (Construction Management)Documento19 páginasCivil Engineering (Construction Management)Aashutosh TimilsinaAinda não há avaliações
- Laboratory Experiments PDFDocumento48 páginasLaboratory Experiments PDFcivaasAinda não há avaliações
- Laboratory ExperimentsDocumento419 páginasLaboratory ExperimentscivaasAinda não há avaliações
- Civil Engineering (Construction Management)Documento570 páginasCivil Engineering (Construction Management)civaasAinda não há avaliações
- CircuitAnalysis CK Tse PDFDocumento49 páginasCircuitAnalysis CK Tse PDFcivaasAinda não há avaliações
- 11th STD Physics Vol-2Documento211 páginas11th STD Physics Vol-2Sharan RajAinda não há avaliações
- Civil Engineering (Construction Management)Documento19 páginasCivil Engineering (Construction Management)Aashutosh TimilsinaAinda não há avaliações
- WWW - Ece.mcmaster - Ca Ibruce Courses Worked Problems ch5 PDFDocumento12 páginasWWW - Ece.mcmaster - Ca Ibruce Courses Worked Problems ch5 PDFcivaasAinda não há avaliações
- Control Engineering PDFDocumento14 páginasControl Engineering PDFcivaasAinda não há avaliações
- Transformers-Per Unit SystemDocumento39 páginasTransformers-Per Unit SystemcivaasAinda não há avaliações
- Datsun Go+Documento2 páginasDatsun Go+civaasAinda não há avaliações
- Classical Electromagnetism - FitzpatrickDocumento227 páginasClassical Electromagnetism - Fitzpatrickgamekingd07Ainda não há avaliações
- Web - Ist.utl - PT Ist11038 Acad or LP GassVinjaDocumento9 páginasWeb - Ist.utl - PT Ist11038 Acad or LP GassVinjacivaasAinda não há avaliações
- Case Studies in Project Management-Anbari, Frank T PDFDocumento20 páginasCase Studies in Project Management-Anbari, Frank T PDFcivaasAinda não há avaliações
- SensationDocumento27 páginasSensationcivaasAinda não há avaliações
- Manmatha Varusha Panchangam2015-2016Documento18 páginasManmatha Varusha Panchangam2015-2016shganesh81Ainda não há avaliações
- Z TransformDocumento22 páginasZ TransformcivaasAinda não há avaliações
- SensationDocumento27 páginasSensationcivaasAinda não há avaliações
- Manmatha Varusha Panchangam2015-2016Documento18 páginasManmatha Varusha Panchangam2015-2016shganesh81Ainda não há avaliações
- Physics 11 Part 1Documento255 páginasPhysics 11 Part 1kalaikalai360Ainda não há avaliações
- Algebra PDFDocumento189 páginasAlgebra PDFAlmir AdrovicAinda não há avaliações
- Control SystemsDocumento12 páginasControl SystemscivaasAinda não há avaliações
- Kabir PoemsDocumento13 páginasKabir Poemsapi-3722436100% (1)
- Control ProblemsDocumento9 páginasControl ProblemscivaasAinda não há avaliações
- ARIIX - Clean - Eating - Easy - Ecipes - For - A - Healthy - Life - Narx PDFDocumento48 páginasARIIX - Clean - Eating - Easy - Ecipes - For - A - Healthy - Life - Narx PDFAnte BaškovićAinda não há avaliações
- Managing Errors and ExceptionDocumento12 páginasManaging Errors and ExceptionShanmuka Sreenivas100% (1)
- Blackbook 2Documento94 páginasBlackbook 2yogesh kumbharAinda não há avaliações
- Abas Drug Study Nicu PDFDocumento4 páginasAbas Drug Study Nicu PDFAlexander Miguel M. AbasAinda não há avaliações
- Ty Baf TaxationDocumento4 páginasTy Baf TaxationAkki GalaAinda não há avaliações
- Caroline Coady: EducationDocumento3 páginasCaroline Coady: Educationapi-491896852Ainda não há avaliações
- 2.ed - Eng6 - q1 - Mod3 - Make Connections Between Information Viewed and Personal ExpiriencesDocumento32 páginas2.ed - Eng6 - q1 - Mod3 - Make Connections Between Information Viewed and Personal ExpiriencesToni Marie Atienza Besa100% (3)
- Linux ProgramDocumento131 páginasLinux ProgramsivashaAinda não há avaliações
- Cln4u Task Prisons RubricsDocumento2 páginasCln4u Task Prisons RubricsJordiBdMAinda não há avaliações
- Gobekli TepeDocumento2 páginasGobekli TepeCarl Feagans100% (1)
- TechBridge TCP ServiceNow Business Case - Group 6Documento9 páginasTechBridge TCP ServiceNow Business Case - Group 6Takiyah Shealy100% (1)
- E-CRM Analytics The Role of Data Integra PDFDocumento310 páginasE-CRM Analytics The Role of Data Integra PDFJohn JiménezAinda não há avaliações
- Agrinome For Breeding - Glossary List For Mutual Understandings v0.3 - 040319Documento7 páginasAgrinome For Breeding - Glossary List For Mutual Understandings v0.3 - 040319mustakim mohamadAinda não há avaliações
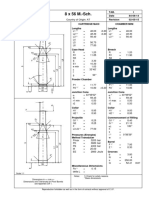
- 8 X 56 M.-SCH.: Country of Origin: ATDocumento1 página8 X 56 M.-SCH.: Country of Origin: ATMohammed SirelkhatimAinda não há avaliações
- Pepsico SDM ProjectDocumento6 páginasPepsico SDM ProjectJemini GanatraAinda não há avaliações
- Creating A Research Space (C.A.R.S.) ModelDocumento5 páginasCreating A Research Space (C.A.R.S.) ModelNazwa MustikaAinda não há avaliações
- Previews 1633186 PreDocumento11 páginasPreviews 1633186 PreDavid MorenoAinda não há avaliações
- 95-03097 Ballvlv300350 WCB PDFDocumento26 páginas95-03097 Ballvlv300350 WCB PDFasitdeyAinda não há avaliações
- Session 10. Value Proposition.Documento69 páginasSession 10. Value Proposition.Bibhu R. TuladharAinda não há avaliações
- Retail Branding and Store Loyalty - Analysis in The Context of Reciprocity, Store Accessibility, and Retail Formats (PDFDrive)Documento197 páginasRetail Branding and Store Loyalty - Analysis in The Context of Reciprocity, Store Accessibility, and Retail Formats (PDFDrive)Refu Se ShitAinda não há avaliações
- Philippine Education Deteriorating - EditedDocumento3 páginasPhilippine Education Deteriorating - EditedRukimi Yamato100% (1)
- DP-1520 PMDocumento152 páginasDP-1520 PMIon JardelAinda não há avaliações
- Punches and Kicks Are Tools To Kill The Ego.Documento1 páginaPunches and Kicks Are Tools To Kill The Ego.arunpandey1686Ainda não há avaliações
- Final - Anarchy One-Sheet Sell SheetDocumento2 páginasFinal - Anarchy One-Sheet Sell SheetMaddanie WijayaAinda não há avaliações
- 1572 - Anantha Narayanan FFS CalculationDocumento1 página1572 - Anantha Narayanan FFS CalculationAnantha NarayananAinda não há avaliações
- Bichelle HarrisonDocumento2 páginasBichelle HarrisonShahbaz KhanAinda não há avaliações