Você também pode gostar
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNo EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeNota: 4 de 5 estrelas4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNo EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreNota: 4 de 5 estrelas4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItNo EverandNever Split the Difference: Negotiating As If Your Life Depended On ItNota: 4.5 de 5 estrelas4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNo EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceNota: 4 de 5 estrelas4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNo EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersNota: 4.5 de 5 estrelas4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNo EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureNota: 4.5 de 5 estrelas4.5/5 (474)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)No EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Nota: 4.5 de 5 estrelas4.5/5 (121)
- The Emperor of All Maladies: A Biography of CancerNo EverandThe Emperor of All Maladies: A Biography of CancerNota: 4.5 de 5 estrelas4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingNo EverandThe Little Book of Hygge: Danish Secrets to Happy LivingNota: 3.5 de 5 estrelas3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyNo EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyNota: 3.5 de 5 estrelas3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)No EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Nota: 4 de 5 estrelas4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNo EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaNota: 4.5 de 5 estrelas4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNo EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryNota: 3.5 de 5 estrelas3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnNo EverandTeam of Rivals: The Political Genius of Abraham LincolnNota: 4.5 de 5 estrelas4.5/5 (234)
- The Unwinding: An Inner History of the New AmericaNo EverandThe Unwinding: An Inner History of the New AmericaNota: 4 de 5 estrelas4/5 (45)
- CONCLUSION (Multi-Threading)Documento6 páginasCONCLUSION (Multi-Threading)Aakansh ShrivastavaAinda não há avaliações
- Tibco BW Performance Tuning TipsDocumento6 páginasTibco BW Performance Tuning TipsAsk SatwaliyaAinda não há avaliações
- FB 3 Migration Guide Rev102Documento125 páginasFB 3 Migration Guide Rev102angdrakeAinda não há avaliações
- Use Case Diagram:: LoginDocumento6 páginasUse Case Diagram:: Loginvedavyas99Ainda não há avaliações
- Visual Models Object-Oriented Software: Class DiagramDocumento2 páginasVisual Models Object-Oriented Software: Class DiagramSiri VulisettyAinda não há avaliações
- What Is SDLC?: 1. Requirements GatheringDocumento2 páginasWhat Is SDLC?: 1. Requirements GatheringSiri VulisettyAinda não há avaliações
- Abstract: Existing SystemDocumento2 páginasAbstract: Existing SystemSiri VulisettyAinda não há avaliações
- White-Box TestingDocumento2 páginasWhite-Box TestingSiri VulisettyAinda não há avaliações
- Use Case Diagram:: LoginDocumento6 páginasUse Case Diagram:: Loginvedavyas99Ainda não há avaliações
- ER-diagram For Admin: Admin - Login Jobs - PostDocumento3 páginasER-diagram For Admin: Admin - Login Jobs - Postvedavyas99Ainda não há avaliações
- Create Agent Tips & Suggestions: Job-Application-FormDocumento1 páginaCreate Agent Tips & Suggestions: Job-Application-Formvedavyas99Ainda não há avaliações
- 8051 Instruction SetDocumento80 páginas8051 Instruction Setsubramanyam62Ainda não há avaliações
- Study Guide BI Author v2Documento3 páginasStudy Guide BI Author v2jonesclarkAinda não há avaliações
- ER-diagram For Admin: Admin - Login Jobs - PostDocumento3 páginasER-diagram For Admin: Admin - Login Jobs - Postvedavyas99Ainda não há avaliações
- Create Agent Tips & Suggestions: Job-Application-FormDocumento1 páginaCreate Agent Tips & Suggestions: Job-Application-Formvedavyas99Ainda não há avaliações
- Assignment IDocumento2 páginasAssignment Ivedavyas99Ainda não há avaliações
- MID 1 SolDocumento9 páginasMID 1 Solvedavyas99Ainda não há avaliações
- MobileIP 2Documento10 páginasMobileIP 2Senthilathiban ThevarasaAinda não há avaliações
- With Effect From The Academic Year 2013-2014 CS 404 Principles and Applications of Embedded SystemsDocumento2 páginasWith Effect From The Academic Year 2013-2014 CS 404 Principles and Applications of Embedded Systemsvedavyas99Ainda não há avaliações
- Excel Program ListDocumento6 páginasExcel Program Listvedavyas99Ainda não há avaliações
- AICTE Clarifications 1Documento9 páginasAICTE Clarifications 1abidansariali100% (5)
- ECE632 Mobile CommunicationDocumento181 páginasECE632 Mobile CommunicationUsama LatifAinda não há avaliações
- Excel Program ListDocumento6 páginasExcel Program Listvedavyas99Ainda não há avaliações
- Microprocessor - Overview: How Does A Microprocessor Work?Documento8 páginasMicroprocessor - Overview: How Does A Microprocessor Work?vedavyas99Ainda não há avaliações
- GprsDocumento57 páginasGprsvedavyas99Ainda não há avaliações
- GSM 2Documento60 páginasGSM 2vedavyas99Ainda não há avaliações
- Assembly Language ProgrammingDocumento1 páginaAssembly Language Programmingvedavyas99Ainda não há avaliações
- LAN Wiring & Pinouts: 10base-T, 100base-TX/T4, 1000base-TDocumento11 páginasLAN Wiring & Pinouts: 10base-T, 100base-TX/T4, 1000base-Tvedavyas99Ainda não há avaliações
- SLR4 (AS & A) - Operating Systems - Systems SoftwareDocumento2 páginasSLR4 (AS & A) - Operating Systems - Systems SoftwareZakAinda não há avaliações
- A-T - Touhou Hisoutensoku - Readme IMPORTANTDocumento2 páginasA-T - Touhou Hisoutensoku - Readme IMPORTANTAlisa Megat AliAinda não há avaliações
- Cmpt-300, Summer 2012, Assignment 1 Due Date May 25 2012Documento1 páginaCmpt-300, Summer 2012, Assignment 1 Due Date May 25 2012Sarah MiliAinda não há avaliações
- Interface:-: Why Use Java Interface?Documento17 páginasInterface:-: Why Use Java Interface?Ashok RawatAinda não há avaliações
- Solaris 8 Jumpstart Setup/How-To Description of A Jumpstart InstallDocumento10 páginasSolaris 8 Jumpstart Setup/How-To Description of A Jumpstart Installchandrashekar_ganesanAinda não há avaliações
- DX DiagDocumento33 páginasDX DiagJosimar Vásquez LaraAinda não há avaliações
- LogDocumento21 páginasLogdarameylisya14Ainda não há avaliações
- Install Ucs EmulatorDocumento4 páginasInstall Ucs EmulatorHamilton Torres BelloAinda não há avaliações
- Chapter 7 Transactions Part 3 Drawbacks of Read Committed and Snapshot IsolationDocumento8 páginasChapter 7 Transactions Part 3 Drawbacks of Read Committed and Snapshot IsolationZohora SanandaAinda não há avaliações
- TLE ICT 10 - Prepare and Create An Installer - Activity SheetDocumento3 páginasTLE ICT 10 - Prepare and Create An Installer - Activity SheetGioSanBuenaventura100% (1)
- 15 Windows XP Top Secrets: 1. Useful Key Shortcuts AvailableDocumento4 páginas15 Windows XP Top Secrets: 1. Useful Key Shortcuts AvailablesangramsanandAinda não há avaliações
- The Mach System: AppendixDocumento28 páginasThe Mach System: AppendixkushishardhuAinda não há avaliações
- Team Members: M.Abarna (10PX01) V. Agasthiya Priya (10PX02) K.Ajeesh (10PX03)Documento50 páginasTeam Members: M.Abarna (10PX01) V. Agasthiya Priya (10PX02) K.Ajeesh (10PX03)Ashokkumar Gnanasekar NadarAinda não há avaliações
- Red Hat Enterprise Linux-7-Storage Administration Guide-En-USDocumento256 páginasRed Hat Enterprise Linux-7-Storage Administration Guide-En-USvictorpetrini100% (1)
- Geraldine 2018 Eje 1Documento43 páginasGeraldine 2018 Eje 1Isamir Brito MujicaAinda não há avaliações
- Fuzzing and Finding Vulnerabilities With Winafl/AflDocumento4 páginasFuzzing and Finding Vulnerabilities With Winafl/AflGyfffAinda não há avaliações
- How To Repair Hard Disks With FSCK On macOS - Make Tech Easier PDFDocumento5 páginasHow To Repair Hard Disks With FSCK On macOS - Make Tech Easier PDFjilongfeng666Ainda não há avaliações
- Making Your Windows XP Ready For NASMDocumento10 páginasMaking Your Windows XP Ready For NASMJanine BayhonanAinda não há avaliações
- Peripheral Driver Operation GuideDocumento40 páginasPeripheral Driver Operation GuidePonmadasamy MuthurajAinda não há avaliações
- Log - 2019 11 02 - 22 59 47Documento186 páginasLog - 2019 11 02 - 22 59 47Iuliana MironAinda não há avaliações
- Cygwin Ns2 Complete Installation GuideDocumento26 páginasCygwin Ns2 Complete Installation GuideMd Rubaiyat Bin Sattar100% (9)
- Container Security - Overview PT 1Documento14 páginasContainer Security - Overview PT 1sumititproAinda não há avaliações
- zPDT-vol2-Installation and Basic Use-Sg247722 PDFDocumento86 páginaszPDT-vol2-Installation and Basic Use-Sg247722 PDFrithwikAinda não há avaliações
- 4D HyperV and Exchange 2016 Powershell Cheat SheetDocumento2 páginas4D HyperV and Exchange 2016 Powershell Cheat Sheetm00anj00Ainda não há avaliações
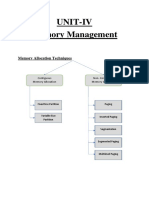
- UNIT 4 Memory ManagementDocumento31 páginasUNIT 4 Memory ManagementMohit SharmaAinda não há avaliações
- STM32H7-System-Hardware Semaphore HSEMDocumento11 páginasSTM32H7-System-Hardware Semaphore HSEMВладимирAinda não há avaliações
- 103-105 Primer Kod: Frmjavaswingform Textfield Textfield - 1 Textfield - 2Documento6 páginas103-105 Primer Kod: Frmjavaswingform Textfield Textfield - 1 Textfield - 2nnmmAinda não há avaliações