Você também pode gostar
- Guía Pokémon Blanco y NegroDocumento245 páginasGuía Pokémon Blanco y NegroJoximar Hinestroza Perea60% (5)
- Manual Crs f3 FinalizadoDocumento92 páginasManual Crs f3 FinalizadoBennyAguirre100% (1)
- Kuka KR6 R900Documento41 páginasKuka KR6 R900LUIS ALBERTO AYRA ROMERO100% (1)
- PLC AbbDocumento10 páginasPLC AbbFrancisco Hernandez MontañezAinda não há avaliações
- Calibracion Posicion Mecanica CeroDocumento5 páginasCalibracion Posicion Mecanica Cero77fenix0% (1)
- Trabajo Práctica Con El MotosimDocumento6 páginasTrabajo Práctica Con El MotosimEdward GarzónAinda não há avaliações
- RobotDocumento45 páginasRobotPablo del Angel Sanchez moralesAinda não há avaliações
- Operacion de Robots CRSDocumento46 páginasOperacion de Robots CRSJorge L. Aguilar MartínezAinda não há avaliações
- 5 Practicas Robot NachiDocumento45 páginas5 Practicas Robot NachiJavierJBV100% (1)
- Análisis I. Propuesta de LaboratorioDocumento4 páginasAnálisis I. Propuesta de LaboratorioAngie100% (1)
- Apuntes para Operacion y Programacion DeRobot CRSDocumento47 páginasApuntes para Operacion y Programacion DeRobot CRSMariana Rodriguez LopezAinda não há avaliações
- Manual Prog CrsDocumento50 páginasManual Prog CrsJohn Pako Garza0% (1)
- Guia Básica para Operación de Robot FanucDocumento22 páginasGuia Básica para Operación de Robot FanucHECTOR IBARRAAinda não há avaliações
- Informe Practica de RoboticaDocumento7 páginasInforme Practica de Roboticazintia mezaAinda não há avaliações
- Robot KUKA R6Documento6 páginasRobot KUKA R6Steven MonárrezAinda não há avaliações
- Programacion de Robot de Coordenadas CartesianasDocumento9 páginasProgramacion de Robot de Coordenadas CartesianasIvan LopezAinda não há avaliações
- Modelo Cinemático Directo Del Robot CRS Robotics A465Documento29 páginasModelo Cinemático Directo Del Robot CRS Robotics A465FernandoAinda não há avaliações
- Informe Seguidor de LineaDocumento12 páginasInforme Seguidor de LineaVinicio TenorioAinda não há avaliações
- Capitulo 9Documento27 páginasCapitulo 9zakty_182Ainda não há avaliações
- Practica Abb 140Documento5 páginasPractica Abb 140Sara Ruiz TajueloAinda não há avaliações
- Movimiento robot Fanuc en sistemas coordenadosDocumento3 páginasMovimiento robot Fanuc en sistemas coordenadosGilAinda não há avaliações
- Bobinas Set y ResetDocumento2 páginasBobinas Set y ResetamiguitoAinda não há avaliações
- Programación básica de un Robot FanucDocumento9 páginasProgramación básica de un Robot Fanucdoniz3083% (6)
- 2.3 Captura de Un Programa CNC.Documento6 páginas2.3 Captura de Un Programa CNC.Cesar OmarAinda não há avaliações
- Manual de Usuario Robot KukaDocumento20 páginasManual de Usuario Robot KukaPablys Zúñiga100% (1)
- Robot CilíndricoDocumento8 páginasRobot Cilíndricoisais100% (1)
- Práctica 3Documento12 páginasPráctica 3German MeraAinda não há avaliações
- 5 Dinámica Del RobotDocumento11 páginas5 Dinámica Del RobotJairo Aguilar RomeroAinda não há avaliações
- Criterios de instalación y programación de un robotDocumento29 páginasCriterios de instalación y programación de un robotdelfino8Ainda não há avaliações
- Práctica #3 Programación Básica Desde El FlexPendantDocumento3 páginasPráctica #3 Programación Básica Desde El FlexPendantJuan Mendoza BravoAinda não há avaliações
- Guia Rapida ABB 6400Documento8 páginasGuia Rapida ABB 6400Eliseo RiveraAinda não há avaliações
- Fresadora CNCDocumento17 páginasFresadora CNCIan Gómez QuinteroAinda não há avaliações
- Cero Maquina Cero Pieza FresadoraDocumento7 páginasCero Maquina Cero Pieza FresadoraRaul GamboaAinda não há avaliações
- Capitulo I Nuevo Proyecto RSLogix 5000Documento11 páginasCapitulo I Nuevo Proyecto RSLogix 5000ZiniaVelázquezTorresAinda não há avaliações
- Ejemplo Manual de InstalaciónDocumento24 páginasEjemplo Manual de InstalaciónAbelardo Willibaldo Ramírez GarcíaAinda não há avaliações
- Introducción al software Cosimir para simulación de brazo robotico RV-2AJDocumento35 páginasIntroducción al software Cosimir para simulación de brazo robotico RV-2AJJose Armando Ascencio Olvera100% (1)
- Programación de Máquinas de CNC Con Códigos GDocumento9 páginasProgramación de Máquinas de CNC Con Códigos GPedro Hinojosa RosalesAinda não há avaliações
- Mantenimiento Robot ABBDocumento2 páginasMantenimiento Robot ABBRene Axel Montes RochaAinda não há avaliações
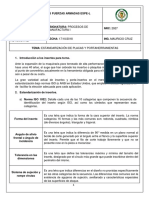
- Estandarizacion de Placas y Porta-HerramientasDocumento6 páginasEstandarizacion de Placas y Porta-HerramientasLex ViracochaAinda não há avaliações
- Plan de MantenimientoDocumento24 páginasPlan de Mantenimientoleo VelazquezAinda não há avaliações
- Descripcion KCP (KUKA CONTROL PANEL)Documento11 páginasDescripcion KCP (KUKA CONTROL PANEL)Alex Moreano AAinda não há avaliações
- Servomotor TutorialDocumento9 páginasServomotor TutorialDaries DctAinda não há avaliações
- Programacion de RobotsDocumento43 páginasProgramacion de RobotsOMEGA LUL KAPPAAinda não há avaliações
- Introduccion LabviewDocumento59 páginasIntroduccion LabviewDaniel JaramilloAinda não há avaliações
- Robo GuideDocumento14 páginasRobo Guidemonserrath100% (1)
- Flexpendant Abb PDFDocumento366 páginasFlexpendant Abb PDFOmar RamosAinda não há avaliações
- Diseño de Robot Velocista de CompetenciaDocumento4 páginasDiseño de Robot Velocista de CompetenciaAlex Alvarez HuillcaAinda não há avaliações
- Fundamentos de Robótica FANUC 1Documento9 páginasFundamentos de Robótica FANUC 1elpatotas22Ainda não há avaliações
- Movimientos circulares robot industrialDocumento10 páginasMovimientos circulares robot industrialAlexiz CuAinda não há avaliações
- M GX Works2 A Es XXXXXXDocumento110 páginasM GX Works2 A Es XXXXXXgersain arandaAinda não há avaliações
- Fanuc Lrmate 200id 4SDocumento26 páginasFanuc Lrmate 200id 4SRaúl AnelAinda não há avaliações
- Simulación en RoboguideDocumento8 páginasSimulación en RoboguideRonald RomeroAinda não há avaliações
- Mecatrónica: modelado, simulación y control de sistemas físicosNo EverandMecatrónica: modelado, simulación y control de sistemas físicosAinda não há avaliações
- Thermof3 NDocumento31 páginasThermof3 NJenni RasoAinda não há avaliações
- Laboratorio ING301 - Guía de RobóticaDocumento12 páginasLaboratorio ING301 - Guía de RobóticaEstefanoRamosAinda não há avaliações
- Fanuc LR MateDocumento9 páginasFanuc LR MateMoy CamarilloAinda não há avaliações
- ROB062 Capitulo 6. El Robot Manipulador ScorbotDocumento7 páginasROB062 Capitulo 6. El Robot Manipulador ScorbotFernan FernandezAinda não há avaliações
- Curso Basico Robot Fanuc UpaDocumento57 páginasCurso Basico Robot Fanuc UpaRene Axel Montes RochaAinda não há avaliações
- Instrucciones de MovimientoDocumento16 páginasInstrucciones de MovimientoVera SheerlayAinda não há avaliações
- Practica 2 Yo Tania MartaDocumento5 páginasPractica 2 Yo Tania MartaOscar HuertaAinda não há avaliações
- Arranque ScorbotDocumento6 páginasArranque ScorbotCarlos RamirezAinda não há avaliações
- TripticoDocumento2 páginasTripticoAngeliica R CortèsAinda não há avaliações
- 2do Examen AnálisisDocumento1 página2do Examen AnálisisAngeliica R CortèsAinda não há avaliações
- Presentación C y FDocumento26 páginasPresentación C y FAngeliica R CortèsAinda não há avaliações
- Borrador de OBjetivoDocumento2 páginasBorrador de OBjetivoAngeliica R CortèsAinda não há avaliações
- Punto de Equilibrio y Análisis de Costos para EmpresasDocumento4 páginasPunto de Equilibrio y Análisis de Costos para EmpresasAngeliica R Cortès100% (1)
- Presentación C y FDocumento26 páginasPresentación C y FAngeliica R CortèsAinda não há avaliações
- FRESADORA FInal PDFDocumento30 páginasFRESADORA FInal PDFAngeliica R CortèsAinda não há avaliações
- FodaDocumento5 páginasFodaAngeliica R CortèsAinda não há avaliações
- Torno PDFDocumento37 páginasTorno PDFVictor NagasakiAinda não há avaliações
- FRESADORA FInal PDFDocumento30 páginasFRESADORA FInal PDFAngeliica R CortèsAinda não há avaliações
- Como Establecer Una Estrategia - DesbloqueadoDocumento24 páginasComo Establecer Una Estrategia - DesbloqueadoRoberto CañasAinda não há avaliações
- Geren CIA Finan Z AsDocumento27 páginasGeren CIA Finan Z AsNicolas DuarteAinda não há avaliações
- Guia Rapida VIPListeria SP2008Documento2 páginasGuia Rapida VIPListeria SP2008api-3697331Ainda não há avaliações
- Articulo Hidroxido de Calcio PDFDocumento6 páginasArticulo Hidroxido de Calcio PDFPsico NoëlAinda não há avaliações
- Informe Caucho Metal EspanaDocumento28 páginasInforme Caucho Metal EspanaPaul RuizAinda não há avaliações
- Condiciones de Iluminacion en Los Centros de TrabajoDocumento15 páginasCondiciones de Iluminacion en Los Centros de TrabajoClaudia BermudezAinda não há avaliações
- 035 20001 001 B 1105Documento8 páginas035 20001 001 B 1105Israel MoroAinda não há avaliações
- Mecanizado Por LaserDocumento12 páginasMecanizado Por Laserantonio ibañezAinda não há avaliações
- Aspectos TeoricosDocumento4 páginasAspectos TeoricosjorgeAinda não há avaliações
- CCNN 5 Eval InicialDocumento4 páginasCCNN 5 Eval InicialMireia PastranaAinda não há avaliações
- Instrumental QuimicoDocumento10 páginasInstrumental QuimicoAmilkar CandiaAinda não há avaliações
- CH Conservacion PreventivaDocumento43 páginasCH Conservacion PreventivaRomina_Bevegni100% (1)
- Límites, Continuidad, Derivadas y Aplicaciones.Documento40 páginasLímites, Continuidad, Derivadas y Aplicaciones.Sunmin WoonAinda não há avaliações
- Informe de Muestra DesconocidaDocumento3 páginasInforme de Muestra Desconocidaconr42582Ainda não há avaliações
- Secado DecrecienteDocumento10 páginasSecado DecrecienteGary Anthony Huamán DelgadoAinda não há avaliações
- 1.-Trabajo Monografico de Ciencias NaturalesDocumento18 páginas1.-Trabajo Monografico de Ciencias NaturalesDennis Gutierrez ÁvilaAinda não há avaliações
- Trabajo Experimental M.R.U.ADocumento9 páginasTrabajo Experimental M.R.U.AJuanAinda não há avaliações
- Cómo elaborar un informe de investigación según normas APADocumento28 páginasCómo elaborar un informe de investigación según normas APAGino Marcello Jiménez100% (1)
- Estudi ArDocumento24 páginasEstudi ArCliber Gim Sq ShAinda não há avaliações
- Informe 2 - 2012 Pa Pegar REAL FINALLDocumento9 páginasInforme 2 - 2012 Pa Pegar REAL FINALLDiego Roa CossioAinda não há avaliações
- C3, C4 y CamDocumento9 páginasC3, C4 y CamsuarezAinda não há avaliações
- Preparacion de SolucionesDocumento10 páginasPreparacion de Solucionesjcastro_290191Ainda não há avaliações
- Problemas de termodinámica y cálculos de fluidosDocumento4 páginasProblemas de termodinámica y cálculos de fluidosVíctor Hugo Castro TavaresAinda não há avaliações
- Aditivo Reductor Agua Retardante Fraguado Plastiment 700Documento2 páginasAditivo Reductor Agua Retardante Fraguado Plastiment 700isaac2408Ainda não há avaliações
- (Ex) Une-En 12601 2011Documento6 páginas(Ex) Une-En 12601 2011Cristian Avila100% (1)
- 8535 Maquinas HidraulicasDocumento6 páginas8535 Maquinas HidraulicasClaudia NavarroAinda não há avaliações
- Estilos aprendizaje ingenieríaDocumento75 páginasEstilos aprendizaje ingenieríaMarco Pascual0% (1)
- Lechos PorososDocumento35 páginasLechos Porososcesar33% (3)
- Pines Intradentinarios o Espigas PDFDocumento12 páginasPines Intradentinarios o Espigas PDFgerardo100% (1)