Você também pode gostar
- Exercise Session 2Documento13 páginasExercise Session 2Carlos Andres Pinzon LoaizaAinda não há avaliações
- Session 3 Kinetics of Particles Work Energy PrincipleDocumento34 páginasSession 3 Kinetics of Particles Work Energy PrincipleRosina AdhikariAinda não há avaliações
- Learnfast Review and Tutorial Hub - Nmat Reviewer: Velocity, Acceleration, Force WorkDocumento8 páginasLearnfast Review and Tutorial Hub - Nmat Reviewer: Velocity, Acceleration, Force WorkEllah Gutierrez50% (2)
- Physics ReviewerDocumento5 páginasPhysics ReviewerJohnny TestAinda não há avaliações
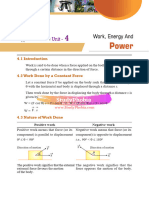
- CH-6 Work, Energy and PowerDocumento31 páginasCH-6 Work, Energy and PowerSurendra singhAinda não há avaliações
- PH8151 - Engineering Physics 01 - by LearnEngineering - inDocumento130 páginasPH8151 - Engineering Physics 01 - by LearnEngineering - inRathodAinda não há avaliações
- Simple Harmonic Motion: M K KX FDocumento5 páginasSimple Harmonic Motion: M K KX Flenish7Ainda não há avaliações
- Session 1: Resultant of Force System: CouplesDocumento4 páginasSession 1: Resultant of Force System: CouplesRhodoralyn Ilagan BalhagAinda não há avaliações
- SRB Session1 RofsDocumento4 páginasSRB Session1 RofsFullo Flores MarviloneAinda não há avaliações
- Numerical Methods For Field Problems: Notes By: Kishore PochirajuDocumento37 páginasNumerical Methods For Field Problems: Notes By: Kishore PochirajuFredAinda não há avaliações
- WorkDocumento5 páginasWorkUmer KhalidAinda não há avaliações
- Rotation of A Rigid Body About A Fixed AxisDocumento14 páginasRotation of A Rigid Body About A Fixed AxisFebrina RahayuAinda não há avaliações
- Equations of Motion For A Single Degree-Of-Freedom SystemDocumento41 páginasEquations of Motion For A Single Degree-Of-Freedom SystemBhind NijjarAinda não há avaliações
- Chapter II Resultant of A Force 2.1 2.2Documento3 páginasChapter II Resultant of A Force 2.1 2.2Jericho Sarmiento ToniacaoAinda não há avaliações
- Linear Momentum and CollisionsDocumento2 páginasLinear Momentum and CollisionsAlex HuynhAinda não há avaliações
- COE 2001 Statics - Lecture 1 - IntroductionDocumento22 páginasCOE 2001 Statics - Lecture 1 - Introductionremino1Ainda não há avaliações
- Chapter 5 Laws of Motion Notes Manoj SirDocumento15 páginasChapter 5 Laws of Motion Notes Manoj SirSTUDY WITH MADHAVAinda não há avaliações
- CHAPTER 6 - ReviewerDocumento19 páginasCHAPTER 6 - ReviewerEdgiecylin S. GALENOAinda não há avaliações
- Module 3 - Elasticity PDFDocumento22 páginasModule 3 - Elasticity PDFLokesh MuralidaraAinda não há avaliações
- Equations of Motion For A Single Degree-Of-Freedom SystemDocumento42 páginasEquations of Motion For A Single Degree-Of-Freedom SystemFernanda LagoAinda não há avaliações
- ME101 Lecture29 KDDocumento16 páginasME101 Lecture29 KDSiddharthaAinda não há avaliações
- CSU-Cabadbaran Advance Review For EE: Topic: Mechanics 1 - StaticsDocumento10 páginasCSU-Cabadbaran Advance Review For EE: Topic: Mechanics 1 - StaticsCinderella WhiteAinda não há avaliações
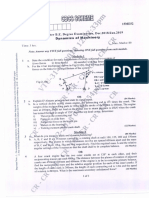
- 15ME52 DOM Dec-2018Documento40 páginas15ME52 DOM Dec-2018prashanthattiAinda não há avaliações
- Hand Out DYNAMICSDocumento11 páginasHand Out DYNAMICSBry RamosAinda não há avaliações
- Slides 03 11 2023Documento13 páginasSlides 03 11 2023sohelsaini112Ainda não há avaliações
- Work, Power & EnergyDocumento16 páginasWork, Power & EnergyAyush GamerAinda não há avaliações
- Positive Work Negative Work: Work, Energy and PowerDocumento38 páginasPositive Work Negative Work: Work, Energy and Powerpraveen.aicpAinda não há avaliações
- Chapter 13: Vibrations and Waves Simple Harmonic Motion: X A M K VDocumento7 páginasChapter 13: Vibrations and Waves Simple Harmonic Motion: X A M K VJohnBenardAinda não há avaliações
- G 12 REVISON 2020 PHY Newtons Laws 3Documento18 páginasG 12 REVISON 2020 PHY Newtons Laws 3mmakgotso mashabelaAinda não há avaliações
- Pe and Energy ConservationDocumento11 páginasPe and Energy ConservationChan LieslAinda não há avaliações
- STUDENT MODULE 4 finalGENPHY1 PDFDocumento6 páginasSTUDENT MODULE 4 finalGENPHY1 PDFKimberly LopezAinda não há avaliações
- Chapter 2 - Newtons Laws of MotionDocumento10 páginasChapter 2 - Newtons Laws of MotionRITCHIE LOU CAGULADAAinda não há avaliações
- Week 6 - Fluid MechanicsDocumento24 páginasWeek 6 - Fluid MechanicsHaze BlehAinda não há avaliações
- Work, Energy and Power: Art Intgrated ActivityDocumento27 páginasWork, Energy and Power: Art Intgrated ActivitylakeishaAinda não há avaliações
- IB Physics SL/HL Study GuideDocumento23 páginasIB Physics SL/HL Study GuidemimiAinda não há avaliações
- Key Definitions AS PhysicsDocumento6 páginasKey Definitions AS Physicshaya waqrAinda não há avaliações
- Unit 2Documento6 páginasUnit 2Mihailo MilicAinda não há avaliações
- Laws of Motion. Byju'sDocumento135 páginasLaws of Motion. Byju'sjimmyemandeeAinda não há avaliações
- Chapter 6 Basic Mechanics PDFDocumento22 páginasChapter 6 Basic Mechanics PDFTarique AhmedAinda não há avaliações
- Chapter 6 Basic MechanicsDocumento22 páginasChapter 6 Basic MechanicsBillyAinda não há avaliações
- MCAT Physics Formula SheetDocumento3 páginasMCAT Physics Formula Sheetemma_reese100% (2)
- Work Energy and PowerDocumento31 páginasWork Energy and PowerRaichal P BijuAinda não há avaliações
- CCC Yenching College CKNGDocumento12 páginasCCC Yenching College CKNGEmily LukAinda não há avaliações
- Chapter 4-ForcesDocumento1 páginaChapter 4-ForcesantonstefanbiehlerAinda não há avaliações
- Numerical SDocumento82 páginasNumerical Smuhammad adilAinda não há avaliações
- Notes For IB DP Physics HL FE2016 - NotebookDocumento2 páginasNotes For IB DP Physics HL FE2016 - NotebookAntony MwangiAinda não há avaliações
- Planar Kinetics of A Rigid Body Work and EnergyDocumento8 páginasPlanar Kinetics of A Rigid Body Work and EnergyA MahdyAinda não há avaliações
- Physics Summarisation: Chapter One. Motion and RelativityDocumento16 páginasPhysics Summarisation: Chapter One. Motion and RelativityYM GaoAinda não há avaliações
- Chapter 18 Static EquilibriumDocumento18 páginasChapter 18 Static EquilibriumMuhammad Fazeel KhanAinda não há avaliações
- CHAPTER 6 - ReviewerDocumento18 páginasCHAPTER 6 - ReviewerEdgiecylin S. GALENOAinda não há avaliações
- Work Power Energy Formula SheetDocumento5 páginasWork Power Energy Formula SheetAman Singh100% (1)
- Unit1 ElasticityDocumento7 páginasUnit1 ElasticityAnupama MohananAinda não há avaliações
- NatuurkundeII SamenvattingDocumento43 páginasNatuurkundeII SamenvattingThibo VerstryngeAinda não há avaliações
- Saudi Arabia Companies Contact DetailsDocumento64 páginasSaudi Arabia Companies Contact DetailsYAGHMOURE ABDALRAHMAN86% (69)
- Engineers House Fire Fighting Course FP 01Documento54 páginasEngineers House Fire Fighting Course FP 01Muhammad ElbarbaryAinda não há avaliações
- Introduction To Game Theory: Analysis of GamesDocumento13 páginasIntroduction To Game Theory: Analysis of GamesAoiAinda não há avaliações
- Community Policing EssaysDocumento7 páginasCommunity Policing Essaysgqdknjnbf100% (2)
- So You Want To Have Your Own Cosmetics BrandDocumento3 páginasSo You Want To Have Your Own Cosmetics BrandCarlosAinda não há avaliações
- A Practical Guide To HL7 Interface DevelopmentDocumento5 páginasA Practical Guide To HL7 Interface DevelopmentmjohnstnAinda não há avaliações
- Parts Catalog MAXSYM400iDocumento70 páginasParts Catalog MAXSYM400iAntonio CoelhoAinda não há avaliações
- Daftar Isian 3 Number Plate, Danger Plate, Anti Climbing DeviceDocumento2 páginasDaftar Isian 3 Number Plate, Danger Plate, Anti Climbing DeviceMochammad Fauzian RafsyanzaniAinda não há avaliações
- 5 Levels of Leadership AnswersDocumento4 páginas5 Levels of Leadership Answersk98hk8wnnbAinda não há avaliações
- Ped 5 FTDocumento39 páginasPed 5 FTJoy Grace TablanteAinda não há avaliações
- BF V CatalogDocumento56 páginasBF V CatalogmaciasrobAinda não há avaliações
- ACT 2 Explanatory Answers - MathDocumento27 páginasACT 2 Explanatory Answers - Mathrotat2348Ainda não há avaliações
- Linux Overview (Commands)Documento9 páginasLinux Overview (Commands)fopataAinda não há avaliações
- Oct2020 GCE Final PDFDocumento30 páginasOct2020 GCE Final PDFGavinAinda não há avaliações
- Erich Segal Doctors PDFDocumento2 páginasErich Segal Doctors PDFAlicia13% (8)
- Winsome Hin-Shin LEE CV (Feb 2017)Documento5 páginasWinsome Hin-Shin LEE CV (Feb 2017)Winsome LeeAinda não há avaliações
- Breuer - Sun & Shadow (Inglés) PDFDocumento18 páginasBreuer - Sun & Shadow (Inglés) PDFccorrea74Ainda não há avaliações
- The Man Who Named The CloudsDocumento7 páginasThe Man Who Named The Cloudsapi-302345936Ainda não há avaliações
- Behaviour Modification Testbank PDFDocumento118 páginasBehaviour Modification Testbank PDFjade tagabAinda não há avaliações
- Uenr0997 12 00 - Manuals Service Modules - Testing & AdjustingDocumento90 páginasUenr0997 12 00 - Manuals Service Modules - Testing & Adjustingmostafa aliAinda não há avaliações
- Digital Album On Prominent Social ScientistsDocumento10 páginasDigital Album On Prominent Social ScientistsOliver Antony ThomasAinda não há avaliações
- The Effect of The Gastrocnemius On The Plantar Fascia: Javier Pascual HuertaDocumento18 páginasThe Effect of The Gastrocnemius On The Plantar Fascia: Javier Pascual HuertamarcelonorisAinda não há avaliações
- Zoom and Re-Zoom Team ActivityDocumento2 páginasZoom and Re-Zoom Team ActivityWalshie28050% (1)
- WEEK 11 - LAB 2 LEVEL 0 - BS Lab Electrical Supply - Domestic House Wiring & Accessories Including Lighting - DONEDocumento6 páginasWEEK 11 - LAB 2 LEVEL 0 - BS Lab Electrical Supply - Domestic House Wiring & Accessories Including Lighting - DONEMuhd Alif MikhailAinda não há avaliações
- Overcoming Obstacles To Ethical BehaviourDocumento4 páginasOvercoming Obstacles To Ethical BehaviourSimran SinghAinda não há avaliações
- ISO 27001 Gap Analysis ChecklistDocumento6 páginasISO 27001 Gap Analysis Checklistlijo jacob70% (10)
- Microsoft PowerPoint - Sesi 2-Communication Skills - PPT (Comp PDFDocumento21 páginasMicrosoft PowerPoint - Sesi 2-Communication Skills - PPT (Comp PDFSarah Eddiah0% (1)
- Lecture Note On Photovoltaic CellDocumento1 páginaLecture Note On Photovoltaic CellHaseeb NawazAinda não há avaliações
- TCL 1Documento29 páginasTCL 1Nikita Mudras0% (2)